Clear Sky Science · tr
Modüler kablo asılı paralel robotun yeniden yapılandırılabilir analizi ve çalışma alanı optimizasyonu
Görünmez Raylar Üzerinde Hareket Eden Robotlar
Ağır bir kamerayı stadyum boyunca kaydırabilen, inşaat sahasında yapı malzemelerini kaldırabilen veya bir rehabilitasyon cihazını hastanın etrafında yönlendirebilen, fakat sert kollar üzerinde değil kablolarla asılı duran bir robot hayal edin. Bu makale, yapısı talebe göre yeniden şekillendirilebilen yeni bir kablo‑asılı robot türünü tanıtıyor; böylece tek bir makine birçok farklı işe uyum sağlayabiliyor ve çalışma alanından en yararlı hareketleri elde edebiliyor.
Değiştirilebilir Parçalardan Robot İnşa Etmek
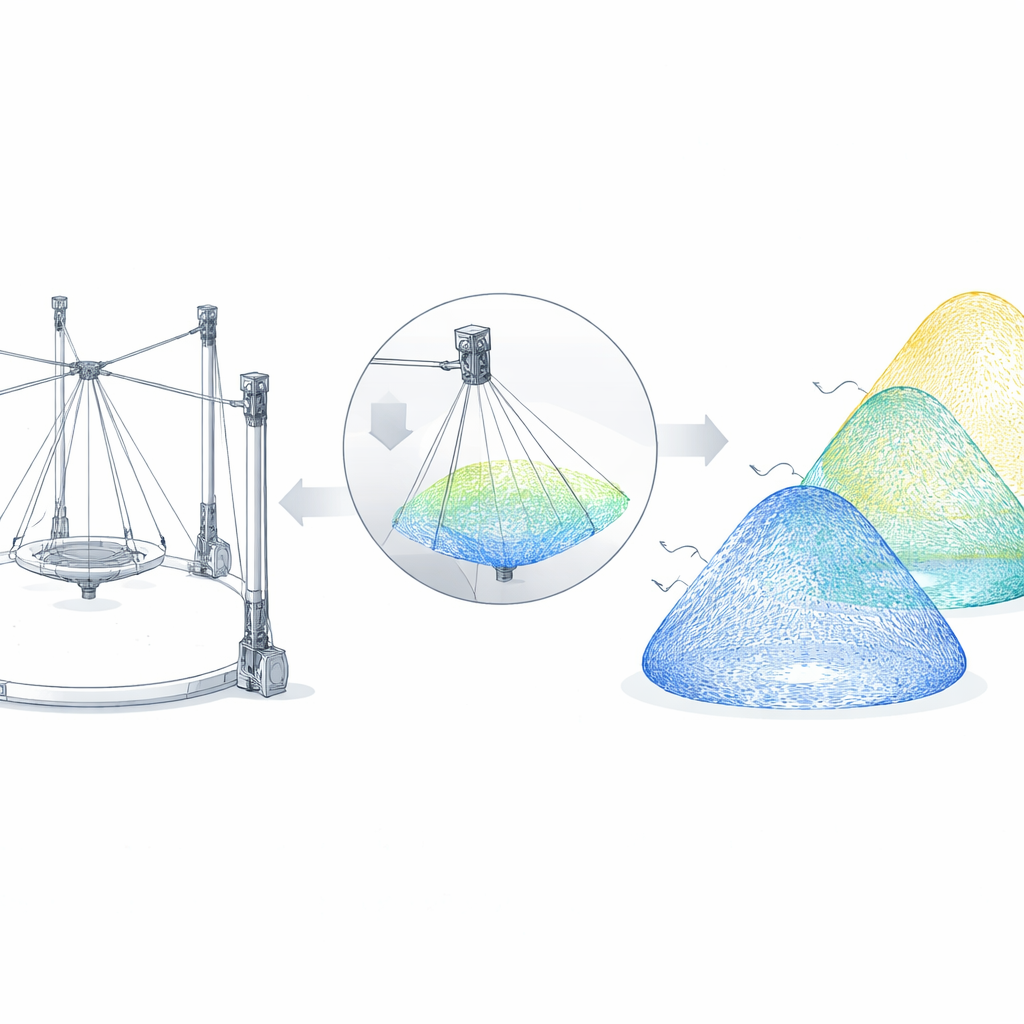
Çalışmanın merkezinde modüler bir kablo‑asılı paralel robot (MCSPR) yer alıyor. Sabit metal kollar yerine, merkezi hareketli platforma (end‑efektör) bağlanan kablo, makaralar ve motorlara sahip, her biri bir kule olarak tasarlanmış altı adede kadar özdeş “kol” kullanılıyor. Bu kollar dairesel bir ray etrafında yer alır ve eklenip çıkarılabilir, döndürülebilir veya yükseltilip alçaltılabilir. Onları yeniden düzenleyerek, aynı donanım birden fazla farklı robot gibi davranabilir: iki kol ile düzlemde hareket eder, üç veya dört kol ile uzayda serbestçe hareket eder, beş veya altı kol ile platformu çoklu yönlerde de eğip döndürebilir.

Şekil Değiştiren Bir Makinenin İskeletini Planlamak
Böylesine esnek bir sistemi tasarlamak yalnızca parçaları birbirine vidalamaktan ibaret değil. Yazarlar, her bir kabloyu, makarayı ve eklemi temel yapı taşı olarak ele alan sistematik bir “yapısal sentez” yaklaşımı kullanıyor. Grafik benzeri diyagramlarla bu elemanların nasıl bağlandığını haritalandırıyorlar, böylece platform istenen hareket serbestliklerine — örneğin üç eksende kayma veya bu eksenler etrafında dönme gibi — sahip oluyor. Bu modül ve bağlantı kataloğu bir tasarım araç takımı görevi görüyor: bir görevin gerektirdiği harekete bağlı olarak tasarımcı, kaç kol kullanılacağını ve bunların dairesel kılavuz üzerinde nereye yerleştirileceğini seçebiliyor; ortaya çıkacak yapının beklenen davranışı göstereceğine güvenebiliyor.
Platformun Hangi Yöne Hareket Edeceğini Bilmek
Platform yalnızca çekebilen, itemeyen kablolarla asılı olduğundan, hareketini tahmin etmek geleneksel robotlara kıyasla daha karmaşık. Ekip, MCSPR’nin beş ana konfigürasyonunun tümü için geçerli olan birleşik bir matematiksel tanım geliştiriyor. Platformun istenen konumu ve yönelimi verildiğinde, her bir kablonun tam olarak ne kadar uzun olması gerektiğini ve uzunluğunun ne hızla değişmesi gerektiğini hesaplıyorlar. Ardından fiziksel bir prototip inşa ediyorlar ve platformu uzayda düzgün bir spiral izleyecek şekilde komutlandırıyorlar. Kablolara yerleştirilmiş sensörler gerçek hareketleri kaydediyor ve bunlar tahmin edilenlerle yakın bir uyum gösteriyor. Bu, modelin geometrisi yeniden yapılandırılırken bile robotu güvenilir şekilde yönlendirebildiğini doğruluyor.
Robotun Nerede Güvenle Durabileceğini Bulmak
Asıl önemli olan, asılı platformun nerede dengede kalabileceğini anlamak. Herhangi bir kablo gevşerse kontrol kaybedilir. Yazarlar, yalnızca yerçekiminin etkili olduğu durumda tüm kabloların pozitif gerilim altında kalabileceği bölgeyi tanımlayan statik denge çalışma alanına odaklanıyor. Monte Carlo yaklaşımı kullanarak, olası birçok platform konumunu ve yönelimini rastgele örnekliyorlar ve her biri için, o duruşu korumak için gereken kablo gerilimlerinin güvenli sınırlar içinde olup olmadığını kontrol ediyorlar. Kabul edilen örnekler, robotun kullanabileceği çalışma hacmini çizen üç boyutlu bir bulut oluşturuyor.
Akıllı Ayarlamalarla Robotun Erişimini Genişletmek
MCSPR’nin kolları yüksekliğini ve açısını değiştirebildiği; platformun ise farklı kütleleri ve eğim açılarını taşıyabildiği için, bu güvenli hacmin boyutu ve şekli sabit değil. Araştırmacılar bu faktörleri altı kollu bir düzenle sistematik olarak değiştiriyor. Daha ağır bir yükün, robotun dengede kalabildiği bölgeyi hızla daralttığını; oysa kol yükseklikleri ve açısal dağılımların akıllıca seçilmesinin bu bölgeyi büyütebildiğini gösteriyorlar. Ardından bir optimizasyon problemi formüle ediyorlar: yükü, kol yüksekliklerini, kol açılarını ve platform eğim aralığını, güvenli çalışma alanının hacmini maksimize edecek şekilde ayarlamak. Yazılımda yaptıkları bu aramayla, ulaşılabilir ve dengeli alanın, basit bir düzene göre birkaç kat daha büyük olduğu bir konfigürasyon buluyorlar.
Gerçek Dünya İşleri İçin Neden Önemli
Bir uzman olmayan için temel mesaj, bu robotun neredeyse bir yapı seti gibi yeniden şekillendirilebilmesi ama aynı zamanda kesinlikle analiz edilip ayarlanabilmesi. Modüler donanımı dikkatli matematiksel planlama ve bilgisayar destekli aramayla birleştirerek, yazarlar tek bir kablo‑asılı makineyi hassas imalattan rehabilitasyona kadar birçok göreve uyarlanabilen çok yönlü bir platforma dönüştürüyor; böylece çalışma alanını en iyi şekilde kullanırken yükleri güvenli biçimde destekliyorlar.
Atıf: Zhao, T., Dai, W., Zheng, F. et al. Reconfigurable analysis and workspace optimization of modular cable-suspended parallel robot. Sci Rep 16, 9210 (2026). https://doi.org/10.1038/s41598-026-37947-4
Anahtar kelimeler: kablo robotları, modüler robotik, yeniden yapılandırılabilir mekanizmalar, robot çalışma alanı, paralel manipülatörler