Clear Sky Science · tr
Gerçek zamanlı polarizatör kusur tespiti için geliştirilmiş EME-YOLOv11
Ekranlardaki küçük kusurlar neden gerçekten önemlidir
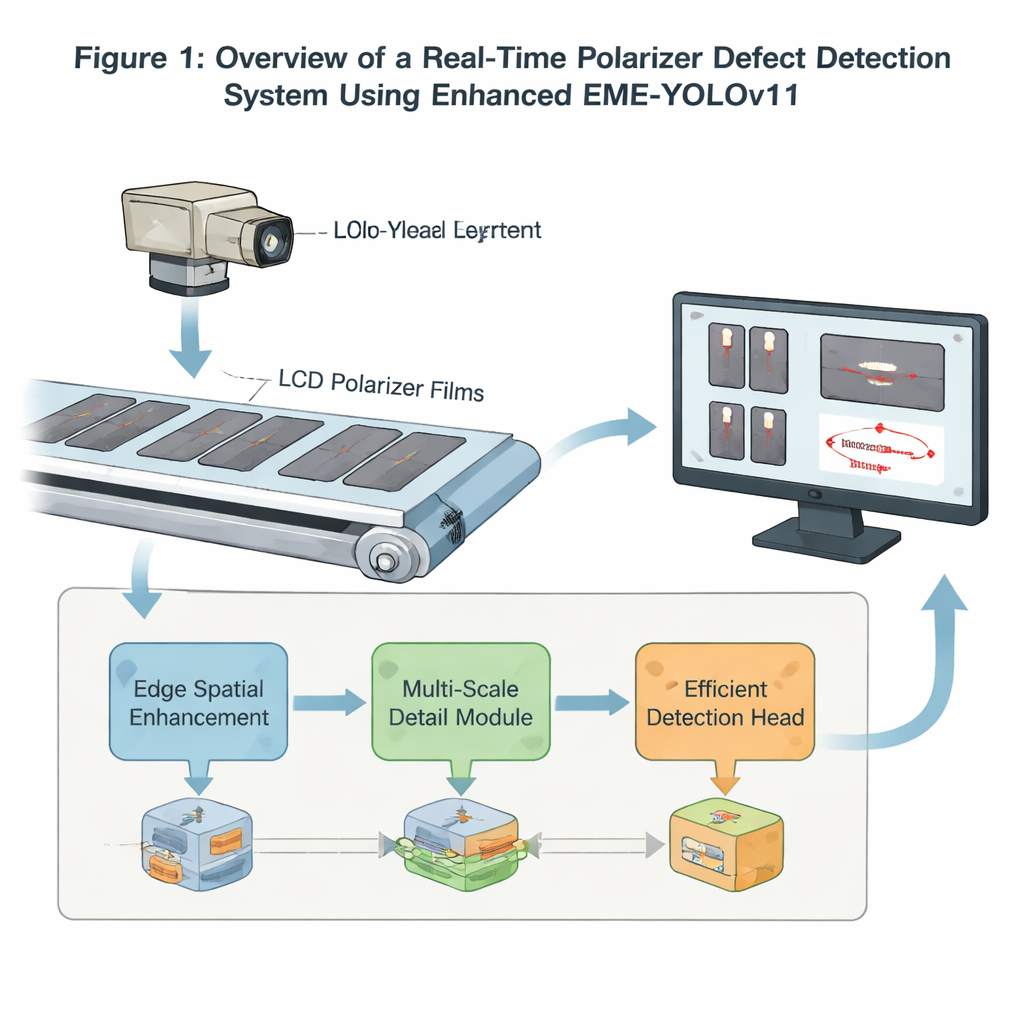
Her akıllı telefon, dizüstü bilgisayar ve TV ekranı, görüntüde ışığın nasıl geçtiğini kontrol eden ince bir optik film olan polarizatöre dayanır. Bu filmde küçük lekeler, kirler veya çizikler olsa bile görüntü kalitesi bozulabilir ve tüm paneller çöpe gidebilir. Günümüzde çoğu fabrika hâlâ bu kusurları tespit etmek için insan denetçilere veya eskimiş görüntü işleme tekniklerine büyük ölçüde bağımlıdır; bu yavaş, yorucu ve her zaman güvenilir değildir. Bu çalışma, üretim hattından geçen panellerde bu kusurları gerçek zamanlı olarak yakalamak üzere tasarlanmış, EME‑YOLOv11 adlı daha akıllı ve daha hızlı bir yapay zeka sistemini tanıtıyor.
İnsanın gözünden makinenin gözüne
Sıvı kristal ekran (LCD) endüstrisinde polarizatör parlaklık, kontrast ve izleme açısını güçlü biçimde etkileyen ana bileşenlerden biridir. Köpükler, lekeler, yabancı partiküller veya alet izleri gibi yaygın kusurlar yalnızca milimetrenin çok küçük bir kısmı genişliğinde olabilir, ancak bir ekranı değersiz hale getirebilir veya kullanılamaz kılabilir. Geleneksel denetim, işçilerin panelleri görsel olarak taramasına dayanıyordu; fakat insanlar solgun veya çok küçük kusurları uzun süre fark etmekte zorlanır ve yargıları deneyim ve yorgunluğa göre değişir. Erken makine görü sistemleri, kameralar ve elle tasarlanmış kuralları kullanarak şekil, doku veya gri seviye ölçümleri yaparak iyileşme sağladı. Ancak bu kural‑tabanlı yöntemler, kusur şekilleri değiştiğinde, kontrast düşük olduğunda veya arka plan karmaşık olduğunda—polarizatör filmlerde sık görülen durumlar—başarısız olur.
Ağların neyin önemli olduğunu öğrenmesine izin vermek
Derin öğrenme ve özellikle konvolüsyonel sinir ağları, bilgisayarların görüntüleri anlamasını, elle tasarlanmış kurallara güvenmek yerine veriden doğrudan faydalı özellikler öğrenerek dönüştürdü. Bu alanda, YOLO ("You Only Look Once") ailesi modeller, tek bir uçtan uca çerçevede hız ve doğruluğu dengeleyerek gerçek zamanlı nesne tespiti için bir iş atölyesi haline geldi. Yazarlar, zaten hızlı tespit için ayarlanmış olan son YOLOv11 modelinin üzerine inşa ederek bunu özel olarak polarizatör denetimine uyarlıyor. Amaçları modeli ince kusurlara karşı daha duyarlı hale getirmek, endüstriyel konuşlandırmalar için yeterince hafif tutmak ve hareket halindeki üretim hatlarına yetişecek kadar hızlı işlemeye devam etmesini sağlamak.
Kenarları keskinleştirmek ve ince ayrıntılara yakınlaşmak
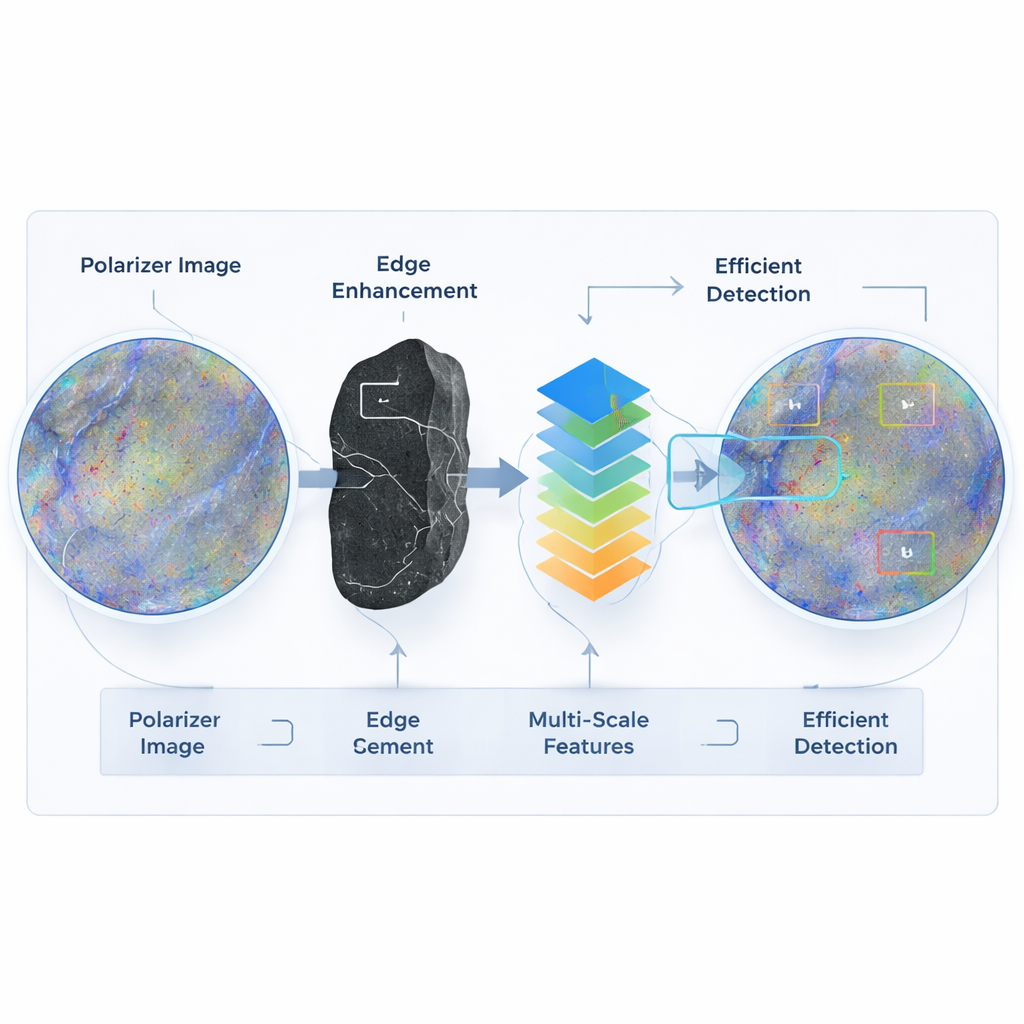
İlk ana iyileştirme, ağın kenarları ve mekânsal desenleri görme biçimine odaklanıyor. Yazarlar, YOLOv11’in omurgasındaki standart bir bloğu iki paralel dalga çalışan yeni bir modülle değiştiriyor: bir dalga yoğunluk değişimlerini vurgulamak için verimli, klasik bir kenar filtresi olan Sobel operatörü kullanırken, diğer dalga daha geniş dokuları ve yapıları korumak için normal konvolüsyonlar kullanıyor. Bu iki bakış açısını birleştirip ileri besleyerek sistem, aksi takdirde arka plana karışabilecek lekelerin ve izlerin sönük sınırlarını daha iyi belirginleştiriyor. İkinci bir modül ise ağın farklı ölçeklerdeki ayrıntılara bakışını yeniden yazıyor. İnce farklılıkları yıkan havuzlama yerine, yazarlar dikkatle seçilmiş boşluklandırmalarla dilate edilmiş (genişletilmiş) konvolüsyonlar kullanıyor. Bu, modeli parametre sayısını patlatmadan hem küçük yerel özellikleri hem de daha geniş bağlamı yakalayabilmesini sağlıyor; böylece küçük, düzensiz kusurları ve daha büyük olanları tanımasına yardımcı oluyor.
Daha ince bir tespit başlığıyla daha hızlı kararlar
Ağın çıktı bölümünde, yeniden tasarlanmış bir “baş” özellik haritalarını kusurun nerede olduğu ve türü hakkında somut tahminlere dönüştürüyor. Yazarlar bu kısmı üç çözünürlük düzeyine göre yeniden düzenliyor—küçük kusurlar için ince, tipik kusurlar için orta ve daha büyükler için kaba—ve hesaplamaları daha küçük, paralel parçalara bölen gruplanmış konvolüsyonlarla standart konvolüsyonların yerini alıyor. Baş ayrıca sınıflandırmayı (kusur türü) kutu iyileştirmesinden (kesin konum) ayırıyor. Bu kombinasyon hesaplama ve model boyutunu azaltırken doğruluğu da artırıyor. Yaklaşık 4.000 polarizatör görüntüsünden oluşan gerçek bir fabrika veri kümesi üzerinde yapılan testlerde geliştirilmiş EME‑YOLOv11, yalnızca orijinal YOLOv11’i değil, aynı zamanda diğer popüler tek aşamalı ve dönüşümcü tabanlı dedektörleri de geride bırakarak daha az kayan nokta işlemi ve daha az parametreyle daha yüksek hassasiyet ve çağırma (recall) elde etti.
Günlük ekranlar için bunun anlamı
Basitçe söylemek gerekirse, EME‑YOLOv11 polarizatör denetimi için daha akıllı ve daha verimli bir “makine gözü” setidir. Kenarları keskinleştirerek, ince detayları koruyarak ve karar katmanlarını sadeleştirerek, gerçek kusurları daha fazla yakalıyor ve hâlâ gerçek fabrika kullanımı için yeterince hızlı kalıyor. Mevcut testler yüksek performanslı bir grafik kartında çalıştırılmış olsa da, kompakt tasarım doğrudan üretim hatlarına kurulacak gömülü cihazlarda gelecekteki konuşlandırmalara işaret ediyor. Bu tür sistemler yaygın olarak benimsenirse, üreticiler daha az panel israf edebilir, kaliteyi stabilize edebilir ve maliyetleri düşürebilir—bunların tümü nihayetinde insanların her gün kullandığı ekranların güvenilirliğini ve görünümünü iyileştirir.
Atıf: Liu, R., Jing, C., Zhang, T. et al. The enhanced EME-YOLOv11 for real-time polarizer defect detection. Sci Rep 16, 7414 (2026). https://doi.org/10.1038/s41598-026-37884-2
Anahtar kelimeler: polarizatör kusurları, endüstriyel denetim, derin öğrenme, YOLO nesne algılama, makine görü