Clear Sky Science · tr
Takviyeli öğrenme kullanarak kaburgalar arası robotik ultrason görüntülemesi için otonom yol planlama
Doktorların Kaburgaların Ardını Görmesine Yardımcı Robotlar
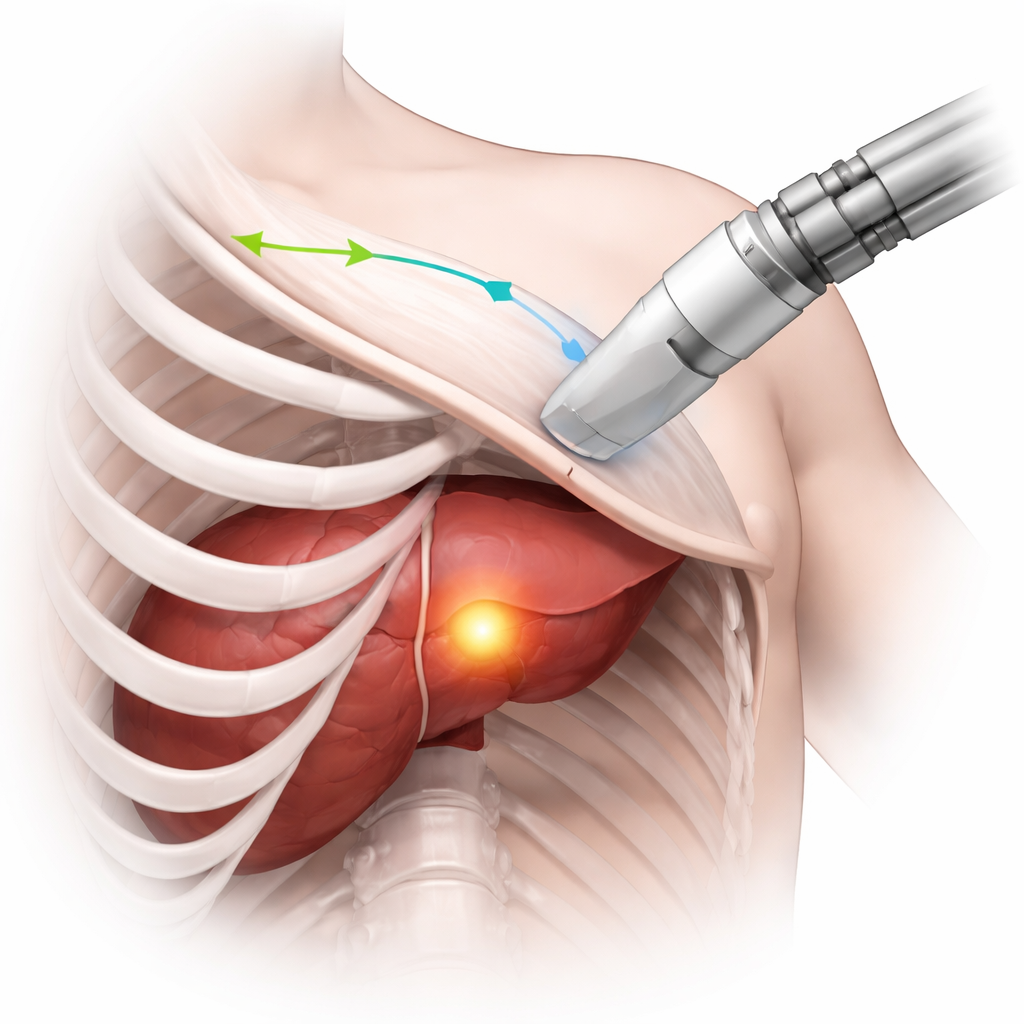
Doktorlar karaciğer veya kalp gibi organları izlerken ultrason kullandığında, kaburgalar sık sık görüşü engeller ve kritik detayları saklayan koyu gölgeler oluşturur. Net bir görüntü elde etmek, probu tutan kişinin yeteneğine ve deneyimine büyük ölçüde bağlıdır. Bu çalışma, yapay zekâ tarafından yönlendirilen bir robotun, kim çalıştırırsa çalıştırsın tümörler ve diğer hedeflerin açık ve tutarlı şekilde görülmesini sağlayacak biçimde kaburgalar arasından otomatik olarak ultrason tarama yolu nasıl planlayabileceğini araştırıyor.
Kaburgalar Arasından Görmenin Neden Bu Kadar Zor Olduğu
Ultrason güvenli, uygun maliyetli ve gerçek zamanlı görüntü sağladığı için yaygındır. Ancak kaburgaların arkasında kalan organları görüntülemek için probun kaburgalar arasındaki dar boşluklardan dikkatle yönlendirilmesi gerekir. Ses dalgaları kemiğe çarparsa engellenir ve görüntüde hiçbir şey görünmeyen büyük siyah bölgeler oluşur. İnsan operatörler bu gölgelerden kaçınmak ve ilgi alanını görünür tutmak için probun açısını ve hareketini eğitim ve deneyimle öğrenir. Bu, tümörün tamamının tedavi edildiğinin tekrar tekrar kontrol edilmesi gereken karaciğer tümörü ablasyonu gibi işlemlerde özellikle önemlidir. Zorluk, bu hassas, üç boyutlu beceriyi robotun kendi başına yapabileceği bir şeye dönüştürmektir.
Sanal Hastalarla Robotu Eğitmek
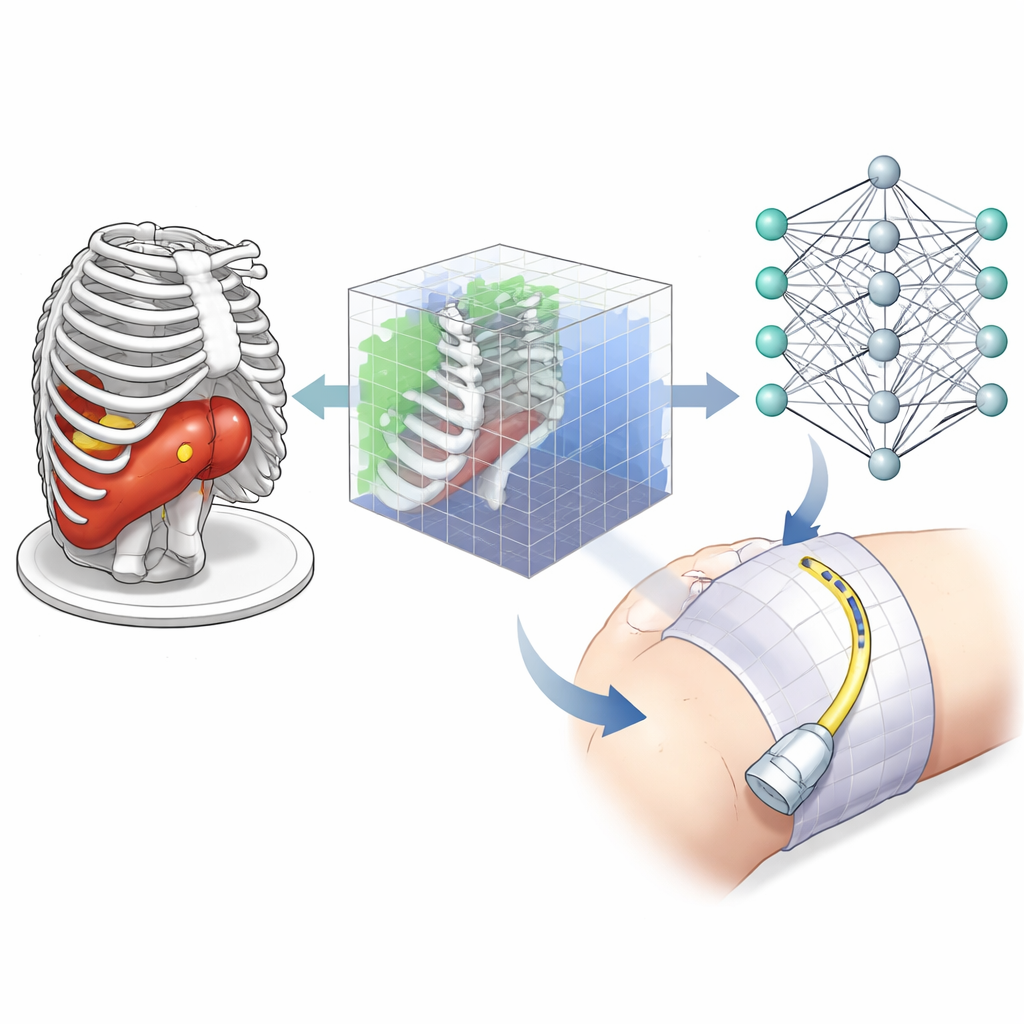
Araştırmacılar doğrudan gürültülü ve değişken ultrason görüntülerinden öğrenmek yerine bilgisayarlı tomografi (BT) taramalarını kullanan sanal bir eğitim ortamı kurdular. BT, kemikler, deri ve karaciğerin net üç boyutlu haritasını sunar ve tümörler farklı şekil ve konumlarda eklenerek birçok gerçekçi senaryo oluşturulabilir. Bu simülatörde sanal bir ultrason probu kaburgaların üzerindeki deri yüzeyi boyunca hareket eder ve ultrason ışınlarının yolları yumuşak doku üzerinden geçen fakat kemiğin önünde engellenen ışınlar olarak modellenir. Bu basit ama gerçekçi model sistemin tümörün hangi kısımlarının görünür olduğunu, sesin ilerlerken ne kadar zayıfladığını ve gölgelerin nerede oluştuğunu söylemesine olanak verir.
Öğrenme Sistemi Nereleri Tarayacağına Nasıl Karar Veriyor
Ekip, bir "ajan"ın deneme yanılma yoluyla daha yüksek ödüllere götüren eylemleri öğrenmesini sağlayan bir yapay zekâ biçimi olan takviyeli öğrenmeyi kullandı. Her adımda ajan, tümör çevresindeki sahnenin kompakt bir 3B temsiline bakar: hangi küçük hacim elemanlarının tümör içerdiği, hangilerinin kemik içerdiği ve hangilerinin simüle edilmiş ultrason ışınları tarafından geçildiği. Ardından sanal probu küçük adımlarla hareket ettirebilir veya eğebilir ya da nihai 3B görünümü oluşturmak için kullanılan "keşfet" modu ile "kayıt" modu arasında geçiş yapabilir. Aldığı ödül üç hedefi birleştirir: hedef hacmin olabildiğince çok kısmını kapsamak, sinyal kaybını azaltmak için probu yeterince yakın tutmak ve kemiğin ışınları engellediği, işe yaramayan gölgeli görüntüler oluşturacak bölgelerden kaçınmak.
Yöntemi Test Etmek
Öğrenilen stratejinin eğitim örneklerinin ötesine genelleşip genelleşmediğini görmek için araştırmacılar ajan daha önce hiç karşılaşmadığı yeni BT taramaları ve yeni tümör şekilleri üzerinde test ettiler. Bu denemelerde, sınırlı sayıda adım içinde hedef hacmin en az %95'i görüntülendiyse tarama planı başarılı kabul edildi. Küçük, orta ve büyük hedefler genelinde sistem %95'e kadar başarı oranları elde etti; gölgesiz bakışların yüksek bir yüzdesini ve prob ile tümör arasındaki makul mesafeleri korudu. Yöntem, karaciğerde dağılmış artık tümör noktaları gibi birden çok hedefin örtülmesi gerektiğinde de çalıştı; görev karmaşıklaştıkça performansın doğal olarak biraz düştüğü görüldü.
Simülasyondan Ameliyathaneye
Şimdilik çalışma fiziksel olarak gerçek bir robotu hareket ettirmekten çok yol planlamaya odaklanıyor. Yollar hasta özelindeki BT taramaları veya daha sonra mevcut kayıt teknikleri kullanılarak bireyin anatomisine eşlenebilecek genel BT "atlasları" üzerinde üretiliyor. Gelecekte bu planlama modülünün robotik kontrol, solunum için hareket telafisi ve daha gerçekçi ultrason görüntü simülasyonu ile birleştirilmesi amaçlanıyor. Bir teknik olmayan için temel çıkarım şudur: bu yaklaşım, bir robotun kaburgalar arasından akıllıca, gölgesiz rotalar bularak hedefi bütünüyle görüşte tutmasını sağlayarak karaciğer tümörü tedavisi gibi işlemler sırasında ultrason izlemesini daha güvenilir ve operatör uzmanlığına daha az bağımlı hale getirebilir.
Atıf: Bi, Y., Qian, C., Zhang, Z. et al. Autonomous path planning for intercostal robotic ultrasound imaging using reinforcement learning. Sci Rep 16, 6356 (2026). https://doi.org/10.1038/s41598-026-37702-9
Anahtar kelimeler: robotik ultrason, takviyeli öğrenme, karaciğer tümörü görüntüleme, kaburgalar arası tarama, tıbbi robotik