Clear Sky Science · tr
BiRRT ve B-spline yolları temelinde meta-sezgisel optimizasyon kullanarak 6 Serbestlik Dereceli robot kolları için dinamik kalite farkındalıklı yol planlaması
Yumuşak ve Güvenli Hareket Eden Robotlar
Endüstriyel robotlar artık insanların, aletlerin ve bant sistemlerinin bulunduğu kalabalık çalışma alanlarını paylaşıyor. Bu sıkışık ortamda bir robot kolun A noktasından B noktasına yalnızca ulaşması yetmez; bunu çarpışma olmadan, düşük enerji kullanımıyla ve kendisini ya da yakın ekipmanı titretmeden yapması gerekir. Bu makale, yaygın bir altı eklemli endüstriyel kol için böyle dikkatli hareketleri planlamaya yönelik pratik bir yöntemi anlatıyor; kaba, bilgisayar tarafından bulunmuş yolları gerçek fabrika donanımında güvenle yürütülebilecek, düzgün ve enerji farkındalıklı hareketlere dönüştürüyor.
Basit Bir Ulaşımın Neden Beklenmedik Derecede Zor Olduğu
Bir robot kol hareket ettiğinde aynı anda birçok etken dengelenmelidir. Yol kısa olmalı ki görevler çabuk bitsin, enerji kullanımı sınırlandırılmalı ki ısı ve aşınma azalısın ve hareket o kadar nazik olmalı ki kol sarsıntı ya da titreşim yapmasın. Klasik yaklaşımlar, birkaç el ile seçilmiş ara noktadan geçen düzgün matematiksel eğriler (örneğin splineler) çizer; bu, açık alanda iyi çalışır ama dolu hücrelerde verimsiz ya da tehlikeli hale gelebilir. Rapidly Exploring Random Trees (RRT) gibi yeni örnekleme temelli yöntemler karmaşık engel alanlarından yol geçirmede iyidir ama genellikle motorlara ve dişlilere zarar veren keskin dönemeçler üretirler. Yazarlar, bu iki yöntem ailesinin tek başına yeterli olmadığını savunuyor; bunun yerine onları iki aşamalı bir çerçevede birleştiriyorlar.
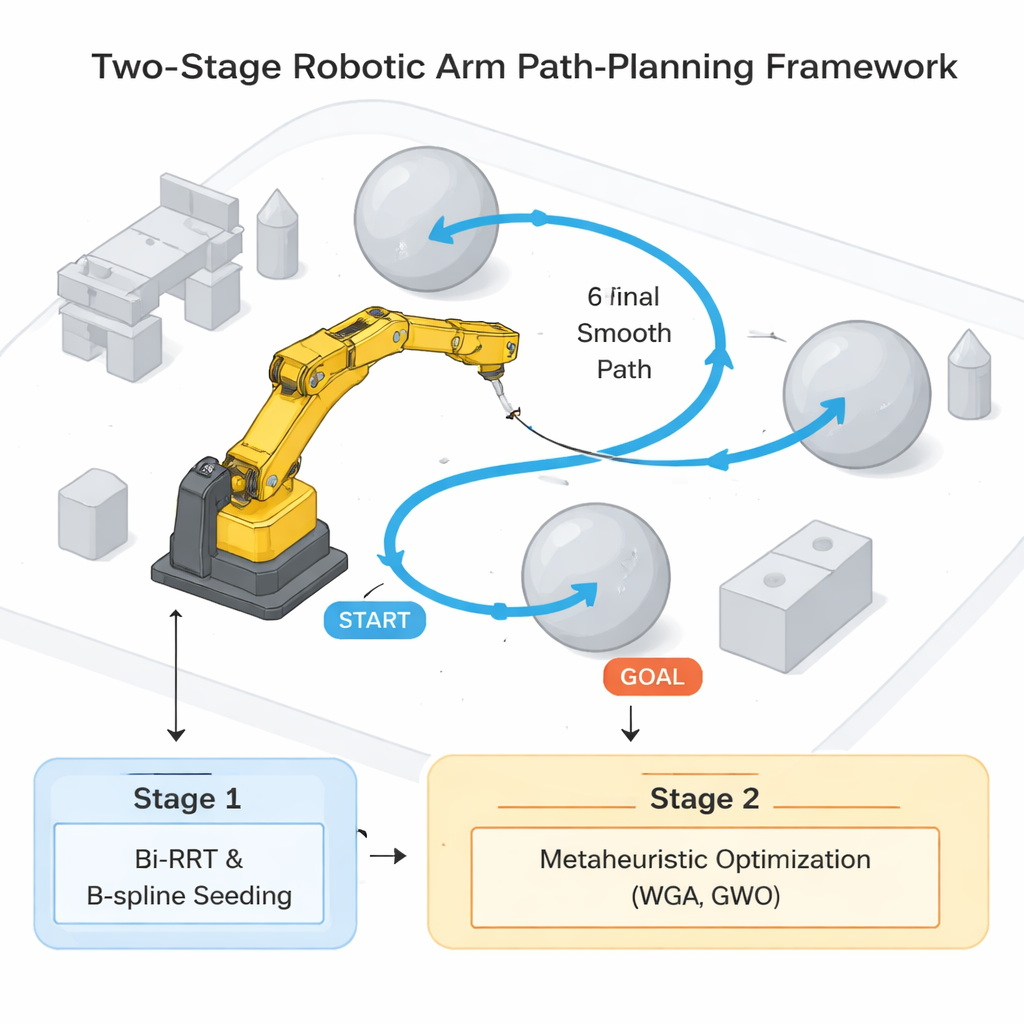
Robot Hareketi için İki Aşamalı Yol Haritası
İlk aşamada ekip, elin uzanacağı uzay yerine robotun eklem uzayında güvenli bir “referans rota” oluşturuyor. Başlangıç ve hedef pozisyonları birbirine bağlayan, küresel engelleri güvenlik marjıyla çevreleyen düzgün bir B-spline eğrisinden başlıyorlar. Bu eğri daha sonra iki yönlü bir RRT (Bi-RRT) planlayıcısına rehberlik ediyor; planlayıcı başlangıçtan ve hedeften iki rastgele ağaç büyütüyor ve bunlar çarpışmasız bir yol oluşturana dek birleşiyor. Bu süreçte kolun her geçici hareketi basitleştirilmiş engel biçimlerine karşı kontrol ediliyor. Bir yol bulunduğunda gereksiz bükümler “short-cut” ile budanıyor ve sonuç, robotun ilkesel olarak takip edebileceği zaman-parametrik bir spline olarak yeniden ifade ediliyor.
Robota Daha Nazik Hareket Etmeyi Öğretmek
İkinci aşama, uygulanabilir ama kusurlu olan bu yolu kalite açısından ayarlıyor. Burada yazarlar iki doğadan esinlenen optimizasyon yöntemi kullanıyor: hibrit Birbalina–Genetik Algoritma (WGA) ve Gri Kurt Optimizasyonu (GWO). Her ikisi de orijinal spline boyunca sınırlı bir kontrol noktası ve zamanlama düğmesi kümesi üzerinde çalışıyor, ancak bu noktaları yalnızca yol etrafında önceden hesaplanmış güvenli koridorlar içinde hareket ettirmelerine izin veriliyor. Her aday hareket, üç unsurdan oluşan tek bir birleşik ölçüyle puanlanıyor: robot elinin katettiği mesafe, eklem düzeyindeki enerji kullanımı (her motorun özelliklerine dayanarak) ve eklemlerin ne kadar “sarsıntılı” olduğu—ivmelerinin zamana göre ne kadar hızlı değiştiği. Bu optimizatörler aday yolları tekrar tekrar önerip test ederek ve iyileştirerek, hâlâ çarpışmasız ama çok daha düzgün ve yürütmeye hazır hareketler arıyorlar.
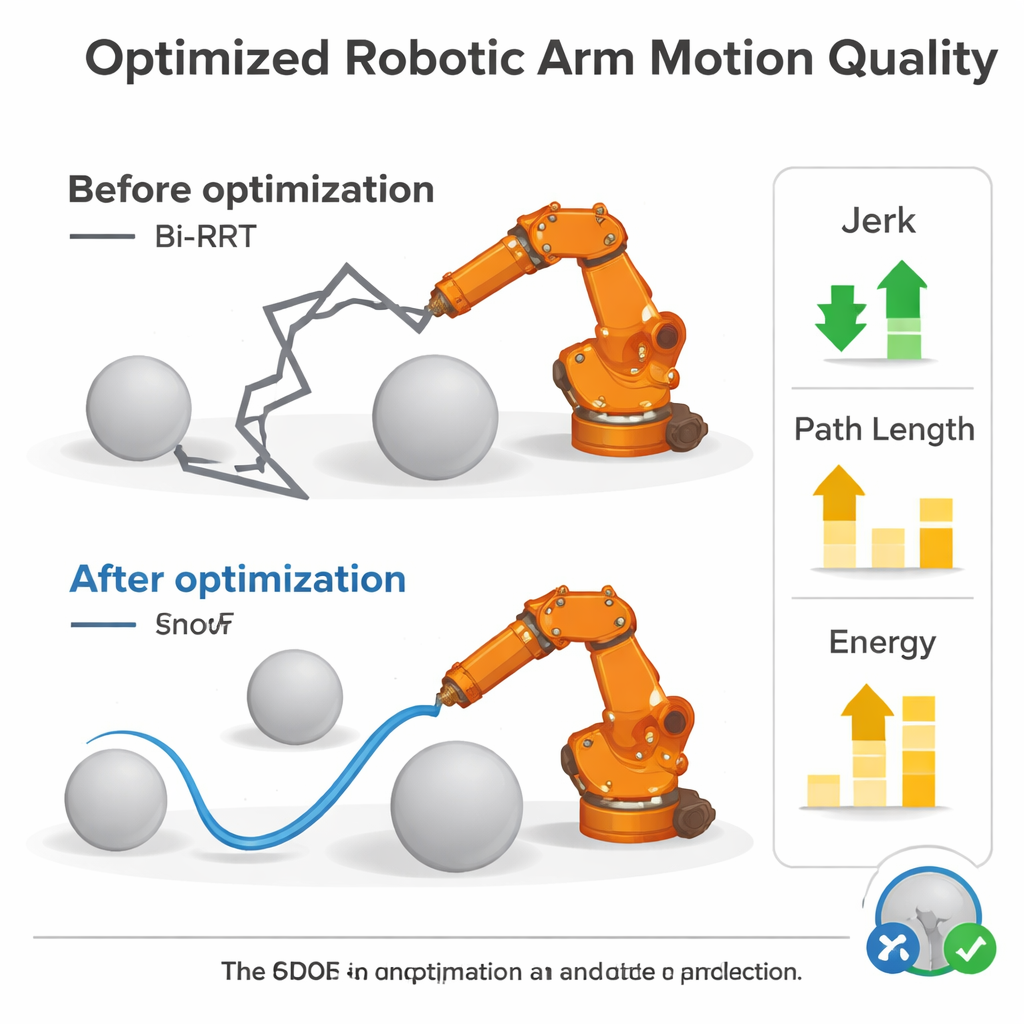
Simülasyonlar Ne Gösteriyor
Yazarlar, boru model üzerinde yaygın bir endüstriyel kol olan KUKA KR 4 R600’ün dijital modelinde, sabit iki saniyelik bir hareket boyunca üç engelli bir sahadan geçmesini test ediyorlar. Salt spline tabanlı bir çözüm zaten makul düzeyde düzgün, ancak tüm olası güvenli rotaları sistematik olarak kullanmıyor. Short-cut uygulanmış bir Bi-RRT benzer geometrik uzunlukta ve hatta daha düşük enerji kullanan bir yol buluyor, ancak büyük bir dezavantajı var: eklem ivme değişikliklerinin göstergesi olan jerk indeksi yaklaşık on kat daha yüksek; bu, gerçek bir makinede titreşimlere ve gerilmeye yol açacak bir hareketi işaret ediyor. WGA veya GWO uygulandıktan sonra, bu hırıltı (jerk) orijinal ham Bi-RRT yoluna göre yaklaşık %94–96 oranında azaltılıyor. Bu dramatik düzeltme sadece seyahat mesafesinde (yaklaşık %15–17) ve enerjide (yaklaşık iki kat) ılımlı artışlara yol açıyor; yazarlar bu uzlaşmanın gerçek donanım için kesinlikle değerli olduğunu savunuyorlar.
Teoriden Fabrika Zeminiye
Uzman olmayanlar için temel çıkarım, yazarların bir robotun ilk, kaba hareket fikrini cilalanmış, donanım-dostu bir harekete dönüştürmek için somut bir reçete—ve MATLAB tabanlı araçlar—sağlamalarıdır. Yaklaşımları önce karmaşık bir ortamda bir yolun varlığını garanti ediyor, sonra o yolu kolun daha az sarsıntı yapacağı şekilde yeniden şekillendiriyor; tüm eklem sınırlarına ve açıklıklara hâlâ uyuyor. Sonuç, gerçek bir endüstriyel robotun daha güvenli ve güvenilir şekilde yürütebileceği bir hareket ailesi; bu, robotların insanlarla paylaşılan çalışma alanlarında gerçek zamanlı olarak kameralar ve hatta beyin sinyali arayüzleri kullanarak hareketlerini uyarlayacağı gelecekteki genişletmeler için zemin hazırlıyor.
Atıf: Elgohr, A.T., Rashad, M., El-Gendy, E.M. et al. Dynamic quality aware path planning for 6 DoF robotic arms using BiRRT and metaheuristic optimization based on B spline paths. Sci Rep 16, 7487 (2026). https://doi.org/10.1038/s41598-026-37676-8
Anahtar kelimeler: robot yol planlaması, endüstriyel robot kolu, çarpışmadan kaçınma, hareketin düzgünlüğü, meta-sezgisel optimizasyon