Clear Sky Science · tr
Bilişsel modeller örtük güdülerin gerçek zamanlı çıkarımını kolaylaştırır
Gizli hedefleri tahmin etmenin önemi
Günlük hayatta, çevrenizdeki insanların niyetlerini sessizce okursunuz—bir sürücünün şeridinize doğru geçmek üzere olup olmadığı, bir bisikletçinin durup durmayacağı veya bir iş arkadaşının yardımcı olmaya mı yoksa rekabet etmeye mi çalıştığı gibi. Bu anlık yargılar, görünür hareketlerden gizli güdüleri yorumlamaya dayanır. Günümüz yapay zekâsı tahminde son derece doğru olabilir, ancak sıklıkla kararının nedenini açıklayamayan bir “kara kutu” gibi davranır. Bu çalışma, insan davranışının psikolojik modellerinin Yapay Zekâ’ya başkalarının güdülerini daha insanî bir biçimde kavrama yetisi kazandırıp kazandıramayacağını; bunun hız, doğruluk ve güvenilirlik açısından ne ölçüde fayda sağladığını sorguluyor.
Kovalama ve kaçınmanın basit bir oyunu
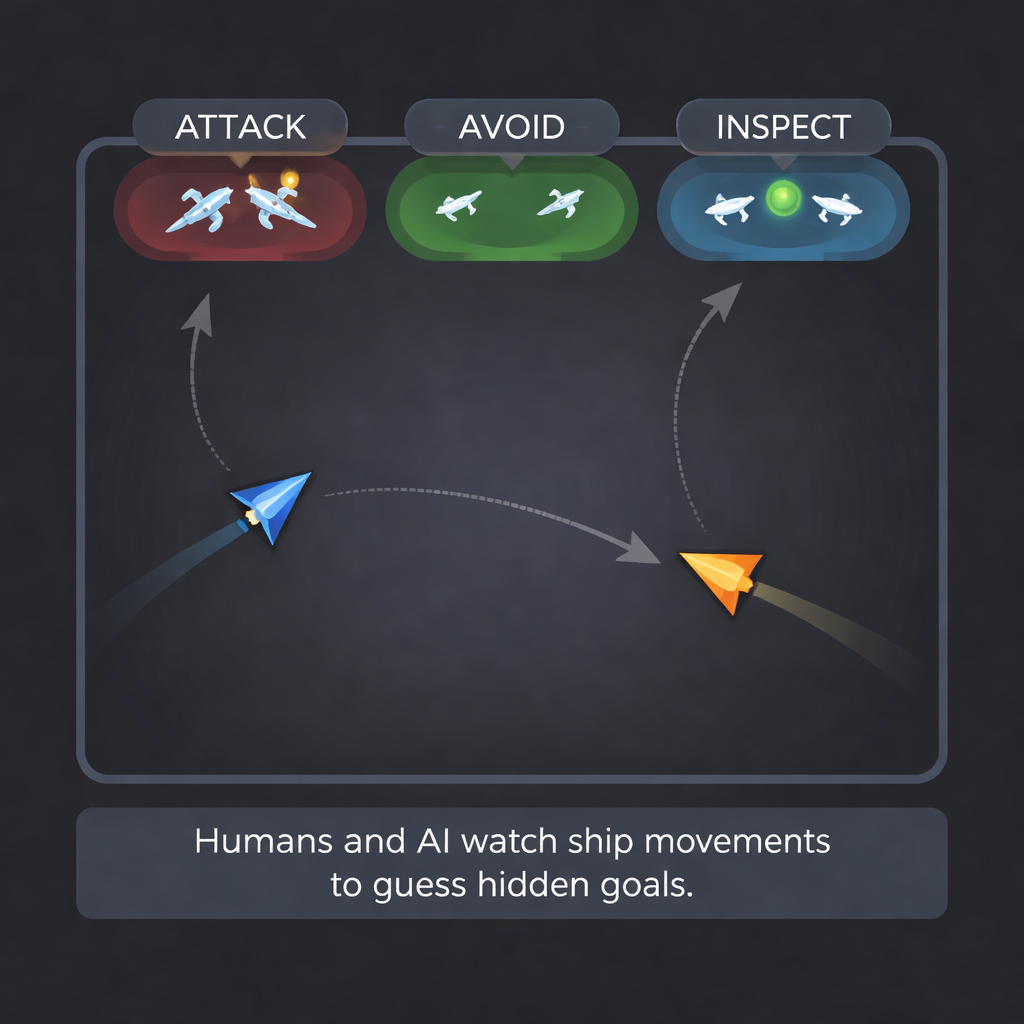
Bunu incelemek için araştırmacılar sadeleştirilmiş bir video oyunu tasarladı. Her 10 saniyelik turda bir insan oyuncu üçgen biçimli bir “gemiyi” bir joystiḱ ile yönlendirirken, bilgisayar kontrollü bir gemi birkaç davranış kalıbından biriyle hareket etti. İnsana gizlice üç amaçtan biri atandı: Saldır (diğer gemiyle çarpışmak), Kaçın (uzakta kalmak) veya İncele (çarpışmadan yakınlarda kalmak). Bilgisayar gemisi saldırgan, çekingen, meraklı, savunmacı veya rastgele dolaşan şekilde davranabiliyordu. Bu kombinasyonlar, örneğin saldırgan bir insanın kaçmaya devam eden çekingen bir bilgisayarı kovaladığı gibi, hareketlerin ya örtüştüğü ya da çatıştığı durumlar yarattı.
İnsanların gizli hedefleri ne kadar iyi okuduğunu ölçmek
İlk adım, insanların hareketten güdüleri kendilerinin ne kadar iyi okuyabildiğini bulmaktı. Ekip, en iyi performans gösteren sekiz gemi pilotunun oynanışlarını aldı ve her turu kısa bir videoya dönüştürdü. Yeni gönüllüler bu klipleri izleyip yalnızca 1, 4, 7 veya 10 saniyelik hareketi gördükten sonra insan oyuncunun amacını—saldırmak, kaçınmak veya incelemek—tahmin etmeliydi. Otizm tanısı olan ve olmayan katılımcıları da içeren birkaç grupta insanlar yaklaşık üçte iki oranında doğru tanımlama yaptı. Doğruluk, deneyi daha uzun gördükçe arttı ve performans gruplar arasında benzerdi; bu da karşılaştırma için sağlam bir insan kıstası sağladı.
Hareket için psikolojik bir taslak
Yazarlar ham video benzeri verileri doğrudan bir sinir ağına vermek yerine, bir kişinin hareketini yönlendirebilecek kuvvetleri yakalamak için bilişsel bir model kurdular. ‘‘Global-local objective pursuit’’ (GLOP) modeli, oyuncunun aynı anda birkaç çekim arasında dengelendiğini varsayar: rakiple tercih edilen bir mesafeyi korumak (çok yakın tehlikeli, çok uzak fırsatları kaçırıyor), ekranda iyi konumlarda kalmak, köşede sıkışmamak ve diğer geminin hızını ve yönünü eşlemek veya tahmin etmek. Bu etkenler tek bir “motivasyonel” hareket yönünde birleştirilir; ayrıca insanların ne kadar akıcı hareket ettiğini ve kontrollerinde ne kadar rastgelelik olduğunu yansıtmak için ek terimler eklenir.

Hareketten niyet okumayı AI’ya öğretmek
Bu modeli gerçek zamanda kullanışlı kılmak için araştırmacılar GLOP parametrelerinin birçok farklı ayarıyla 100.000 oyun turu benzetimi yaptılar. Ardından, gemi konum dizilerini alıp tercih edilen mesafe veya birinin küresel konuma ne kadar önem verdiği gibi gizli parametreleri hızla tahmin etmek üzere tekrarlayan bir sinir ağı eğittiler. Bu ağ birkaç saniyelik hareketten birkaç temel parametreyi çok doğru şekilde geri çıkarabildi. Sonra, oyuncunun amacını üç farklı yoldan tahmin etmek için sınıflandırıcı ağlar eğitildi: ham konum verilerinden doğrudan, basit özet istatistiklerden (ortalama mesafe ve yaklaşma vs. kaçınma gibi) veya bilişsel modelin çıkarılan parametrelerinden. Son olarak, bu kaynakları birleştiren “ansambl” sınıflandırıcılar kurdular.
İnsan kıstasını geçmek
Tüm YZ sınıflandırıcıları insan performansına eşitledi veya aştı, ancak verinin nasıl hazırlandığı önemliydi. Sadece ham harekete ya da yalnızca model parametrelerine dayanan ağlar, insanlar kadar—yaklaşık %66—performans gösterdi. Basit özet istatistikler verildiğinde sınıflandırıcılar daha iyi oldu ve en iyi sonuçlar bu istatistiklerin bilişsel model parametreleriyle birleştirilmesinden elde edildi; doğruluk yaklaşık %72’ye çıktı. Bu modelle bilgilendirilmiş sistemler ayrıca yalnızca ham veriyle eğitilenlere göre daha hızlı ve daha kararlı eğitildiler. Her turun an be an izlendiği durumlarda, YZ bir oyuncunun gizli hedefine ilişkin tahminini ekran yenilemeleri arasındaki zamandan daha kısa sürede güncelleyebildi; pratikte niyeti gerçek zamanlı olarak çıkarabiliyordu.
Günlük YZ için ne anlama geliyor
Bir halk okuyucusu için çıkarım, psikolojik kuramı YZ’ye dahil etmenin makinelerin sadece insanların ne yaptığını değil neden yaptığını da anlamasına yardımcı olabileceğidir. Dağınık hareketleri, birinin ne kadar yakın olmak istediği veya fırsata karşı güvenliği nasıl takas ettiği gibi yorumlanabilir güdülerin küçük bir setine dönüştürerek sistem hem daha doğru hem de açıklaması daha kolay hale gelir. Gelecekte otonom araçlar veya insan–YZ takımları gibi uygulamalarda bu tür bir “bilişsel ön uç”, YZ’nin diğer ajanların niyetlerini daha erken ve daha güvenilir biçimde tahmin etmesine yardım ederek çarpışmaları ve yanlış anlamaları önleyebilir; ayrıca “diğer sürücü muhtemelen şeride geçmeye çalışıyor, sadece sürüşten kaymıyor” gibi insan dostu açıklamalar sunabilir.
Atıf: Fitch, A.K., Kvam, P.D. Cognitive models facilitate real-time inference of latent motives. Sci Rep 16, 6444 (2026). https://doi.org/10.1038/s41598-026-37587-8
Anahtar kelimeler: zihin kuramı, bilişsel modelleme, niyet çıkarımı, insan–Yapay Zeka etkileşimi, açıklanabilir YZ