Clear Sky Science · tr
Hibrit gürültü ortamlarında seyrek-kapılı uzman karışımı mekanizmasına dayalı su altı akustik vektör GEL yön tahmini
Su Altında Gizli Sinyalleri Dinlemek
Gemiler, denizaltılar, su altı robotları ve hatta deniz biyologları, okyanustaki zayıf seslerin nereden geldiğini belirlemek için dinlemeye dayanır. Ancak deniz gürültülü bir ortamdır: motorlar, dalgalar, hayvanlar ve ölçüm cihazlarının kendileri bile parazit ekler. Bu çalışma, gürültünün dağınık ve öngörülemez olduğu durumlarda bile su altı seslerinin yönünü saptamaya yönelik yeni bir yöntem sunuyor; yöntem, her şeyin basit ve tek tip olduğunu varsaymak yerine farklı gürültü türleriyle başa çıkmayı öğrenen modern bir yapay zeka yaklaşimi kullanıyor.
Okyanusta Yön Bulmayı Bu Kadar Zorlaştıran Nedir?
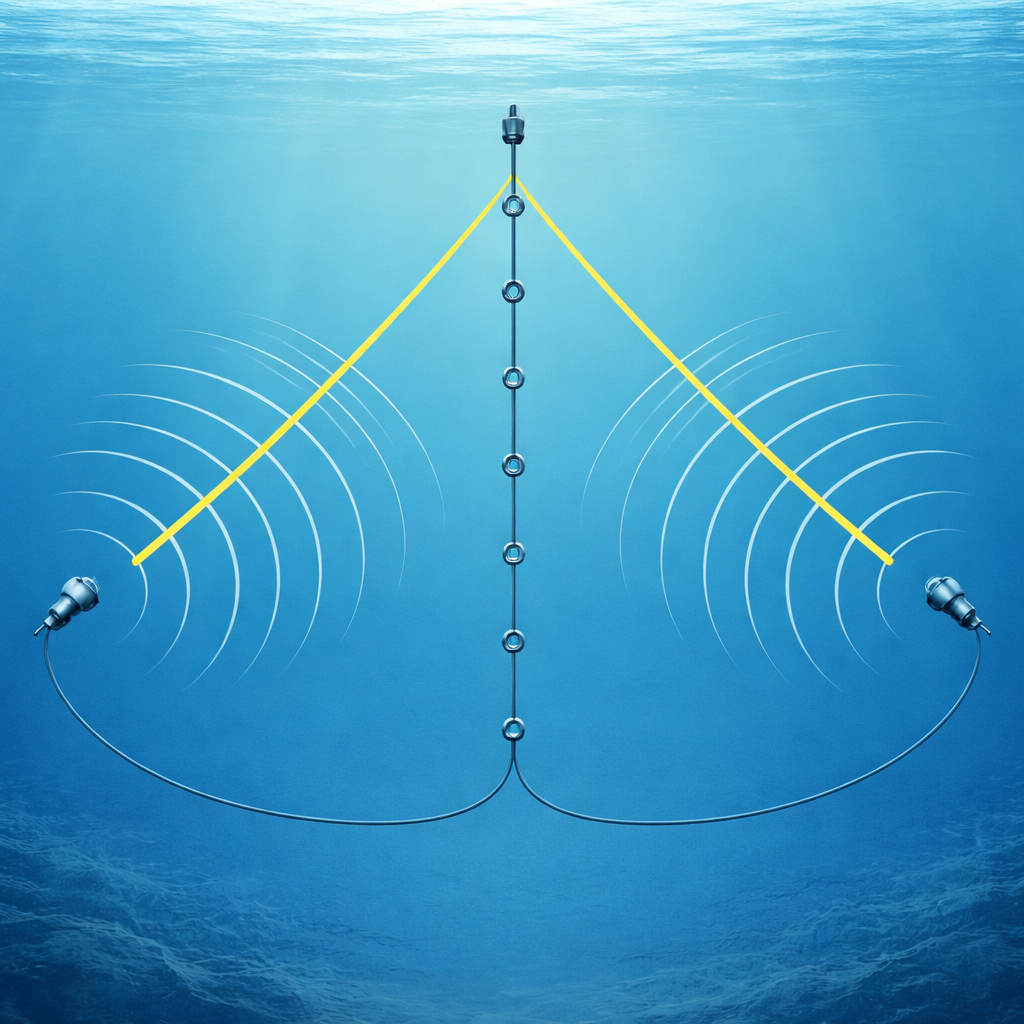
Bir ses kaynağını konumlandırmak için mühendisler, hidrofon adı verilen su altı mikrofonlarını bir sıra halinde dizili bir dizi kullanır. Bir sesin her sensöre ulaşma zamanındaki küçük farkları karşılaştırarak, sesin geldiği açıyı tahmin edebilirler; buna geliş yönü (DOA) tahmini denir. Klasik yöntemler, arka plan gürültüsünün nazik, eşit bir hışırtı gibi davrandığını—matematiksel olarak “beyaz Gauss gürültüsü”—varsayar. Gerçek okyanuslar nadiren bu kadar usludur. Gürültü, ani patlamalar gibi impulsif olabilir; bazı frekanslarda daha fazla enerji içeren renkli yapıda olabilir; veya sensörler arasında düzensiz dağılım gösterebilir. Bu davranış karışımı, hibrit gürültü olarak adlandırılır ve eski algoritmaların varsayımlarını bozar; sonuç olarak en zorlu koşullarda doğruluk hızla düşer.
Daha Akıllı Bir Dinleme Hattı
Araştırmacılar çalışmalarını basit ama güçlü bir sensör düzenine dayandırıyor: su içindeki basınç ve parçacık hareketini ölçen vektör hidrofonlardan oluşan düz bir sıra. Uzak ses kaynakları dalgalar yaydığında, bu dalgalar geliş açısına bağlı olarak her sensöre hafifçe farklı zaman ve fazda ulaşır. Bu ölçümlerden sistem, farklı sensörlerdeki sinyallerin zaman içinde birbirleriyle nasıl ilişkili olduğunu özetleyen bir kovaryans matrisi oluşturur. Bu matris, yönü çıkarmak için gereken geometrik ipuçlarını içerir, ancak çevredeki tüm karmaşık gürültülerle iç içe geçmiştir.
Gürültülü Veriyi Öğrenilebilir Desenlere Çevirmek
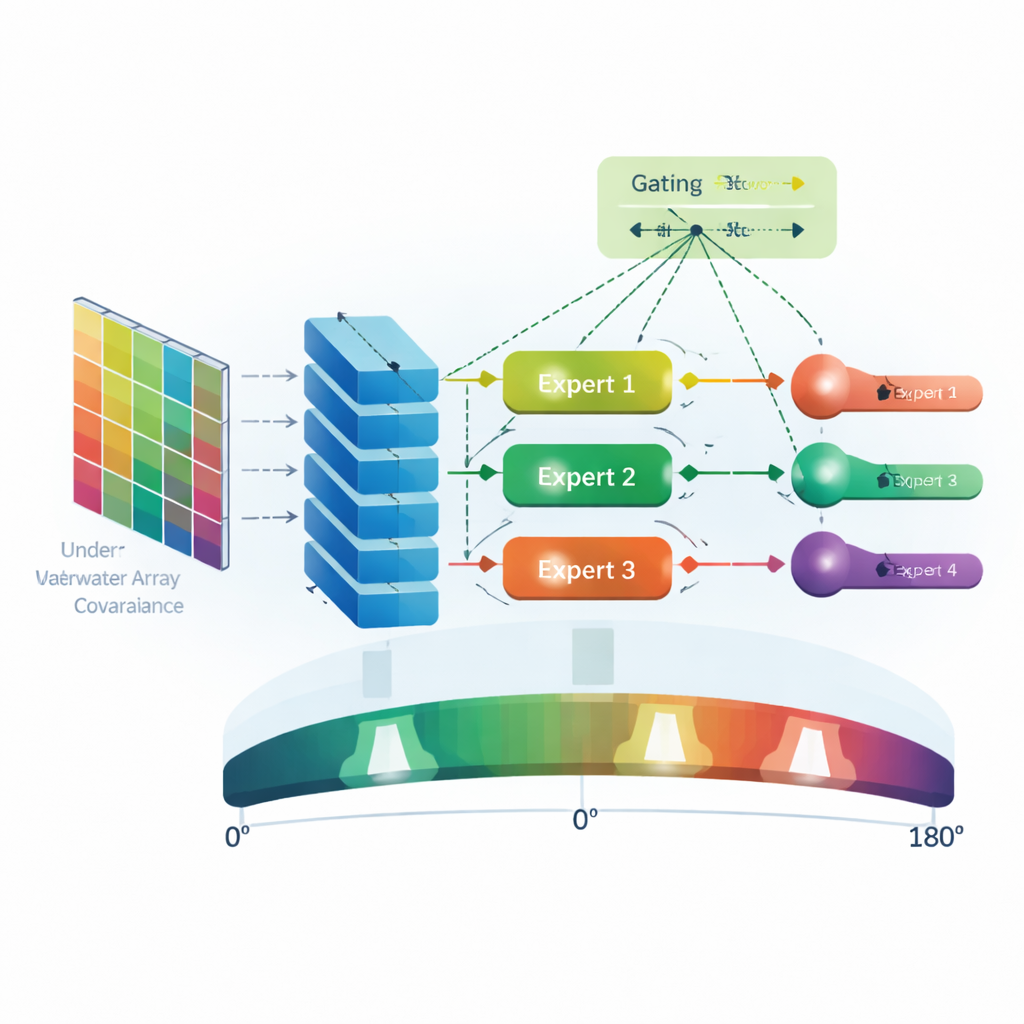
Sinir ağları tipik olarak gerçek sayılarla çalışır, ancak kovaryans matrisi karmaşık değerli olabilir. Bu nedenle ekip matrisi iki gerçek matrise—gerçek ve imajiner kısımlara—ayırır ve bunları iki kanallı bir “görüntü” olarak evrişimli bir sinir ağına (CNN) verir. Bu CNN matrisi tarayarak gerçek sinyal yapısını gürültüden ayıran uzaysal desenleri ortaya çıkarır. Elle tasarlanmış formüllere dayanmak yerine, CNN bu özellikleri doğrudan veriden öğrenir ve basit yerel ilişkilerden, ses kaynaklarını konumlandırmada bilgilendirici daha yüksek düzey desenlere doğru kademeli olarak inşa eder.
Birçok Uzman ve Bir Akıllı Koordinatör
CNN’den sonra gelen kısımda kilit yenilik, seyrek-kapılı uzman karışımı (SMoE) ağıdır. Her durumu tek başına ele almaya çalışan tek, büyük bir model yerine sistem, her biri beyaz, pembe, kırmızı, mavi, mor veya impulsif gürültü gibi belirli bir gürültü türünde ustalaşmış birkaç küçük uzman ağ içerir. Ayrı bir kapı (gating) ağı, CNN tarafından çıkarılan özelliklere bakar ve gelen her örnek için hangi birkaç uzmanın en ilgili olduğunu belirler. Sadece bu seçkin uzmanlar aktive edilir ve bunların çıktıları birleştirilerek 0° ile 180° arasındaki her açı için bir ses kaynağının bulunma olasılığına ilişkin nihai bir tahmin üretilir. Bu tasarım modeli hem uyarlanabilir kılar—gürültü koşulları değiştikçe hangi uzmanlara “kulak verileceğini” değiştirir—hem de verimli kılar; çünkü her zaman tüm uzmanları çalıştırmanın önüne geçer.
Zorlu, Gerçekçi Koşullarda Test Etme
Bu sistemi eğitmek için yazarlar önce her uzmanın yalnızca tek bir gürültü türünü gördüğü veriler oluşturdular, böylece uzmanlaşması sağlandı. Ardından kapı ağı, gerçek hibrit ortamları taklit ederek tüm altı gürültünün karışımlarında eğitildi. Model ayrıca hem simüle edilmiş gürültü hem de gerçek kaydedilmiş su altı gürültüsünü içeren geniş ve gerçekçi bir test setinde, farklı sinyal güçleri ve veri uzunlukları boyunca değerlendirildi. Bilinen klasik teknikler ve diğer derin öğrenme yaklaşımlarıyla karşılaştırıldığında, SMoE modeli özellikle gürültünün yoğun olduğu veya veri miktarının sınırlı olduğu durumlarda tutarlı şekilde daha küçük hatalar ve daha yüksek başarı oranları sundu. Sinyal-gürültü oranının 0 dB olduğu—sinyal ve gürültü gücünün eşit olduğu—durumda model ortalama açısal hatayı bir derecenin altında gerçekleştirdi; rakip yöntemler ise birkaç derece sapabiliyordu.
Gelecekteki Su Altı Algılaması İçin Ne Anlama Geliyor
Basitçe ifade etmek gerekirse, bu çalışma birden çok uzmanlaşmış yapay zeka “dinleyicisinin” işi paylaşmasına izin vermenin ve bunlar arasından anında seçim yapmanın, kaotik ve gürültülü koşullarda su altı seslerinin nereden geldiğini söyleme yeteneğimizi önemli ölçüde artırabileceğini gösteriyor. Yaklaşım, basit doğrusal dizilerin ötesinde başka sensör düzenlerine uyarlanabilir ve aynı fikir—akıllı bir kapıyla uzman karışımı—radar, robotik ve karmaşık parazitlerin varlığında sinyallerin yerinin belirlenmesi gereken diğer alanlarda da yardımcı olabilir. Seyirden çevresel izlemeye kadar güvenilir su altı dinlemeye bağımlı uygulamalar için bu yöntem, gürültü içinde duymayı sağlayan daha esnek ve sağlam bir yol sunuyor.
Atıf: Xu, W., Yi, S., Gu, H. et al. Underwater acoustic vector DOA estimation in hybrid noise environments based on sparsely-gated mixture-of-experts mechanism. Sci Rep 16, 6192 (2026). https://doi.org/10.1038/s41598-026-37217-3
Anahtar kelimeler: su altı akustiği, geliş yönü, hibrit gürültü, derin öğrenme, uzman karışımı