Clear Sky Science · tr
Engebeli ortamlarda heterojen İHA–UGV ekipleri için güvenli formation ölçeklendirme ve hareket planlaması
Havada ve Zeminde Ekip Çalışması Yapan Robotlar
Bir afet bölgesinin üzerinde keşif yapan küçük uçan insansız hava araçları sürüsü ile enkazın içinde ilerleyen dayanıklı kara araçlarının birlikte, uyumlu bir ekip olarak hareket ettiğini hayal edin. Bu makale, böyle karışık robot gruplarının dar, engellerle dolu alanlarda çarpışma veya yoğun yeniden planlama olmadan birlikte kalmasını nasıl sağlayabileceğini inceliyor. Yazarlar, hava ve kara robotlarının kararlı bir formationu paylaşmasını, dar aralıklardan sıkışmadan geçmesini ve hedefe hızlı ve güvenli bir şekilde ulaşmasını sağlayan yeni bir yöntem öneriyor.
Neden Karışık Robot Ekiplerini Koordine Etmek Zor?
Uçan drone’lar ve tekerlekli kara araçları çok farklı davranış sergiler. Drone’lar üç boyutlu uzayda hızla manevra yapar ve rüzgâr gibi etkenlerle kolayca yolundan sapabilir. Kara araçları ise dönüş sınırlarına uymak ve kaba araziyle başa çıkmak zorundadır. Yine de arama-kurtarmadan altyapı denetimine kadar birçok gerçek görev, bu robotların tek, üç boyutlu bir grup olarak birlikte hareket etmesinden fayda sağlayacaktır. Mevcut yöntemler çoğunlukla formation korumayı ve engelden kaçınmayı ayrı problemler olarak ele alır. Çevre karmaşıklaştığında formationlar parçalanma eğilimindedir ve sonra yeniden birleşir; bu da zaman kaybına ve çarpışma riskinin artmasına yol açar.
Grupta Birliği Korumanın Yeni Bir Yolu
Bunu ele almak için yazarlar, formationun şekillenme biçimini ve hareketini sıkı şekilde birbirine bağlayan RG–ASAPF adını verdikleri bir çerçeve tasarlıyorlar. Temelinde formationu “rijit” bir yapı olarak matematiksel tanımlama yatıyor: robotlar arasındaki istenen mesafeler, genel şeklin benzersiz olarak belirlenmesini sağlayacak şekilde seçiliyor; tıpkı sağlam bir 3B iskelenin çubukları gibi. Her robot daha sonra bu mesafelerin korunup geri kazanılması için paylaşılan bir kural kullanarak hareketini ayarlıyor; bu, formation hareket ederken ve dönerken de korunuyor. Bu kural hem uçan hem de kara robotları için çalışacak şekilde tasarlanmış ve modellenmemiş sürtünme ya da küçük dış itmeler gibi belirsizliklere çevrimiçi olarak uyum sağlıyor.
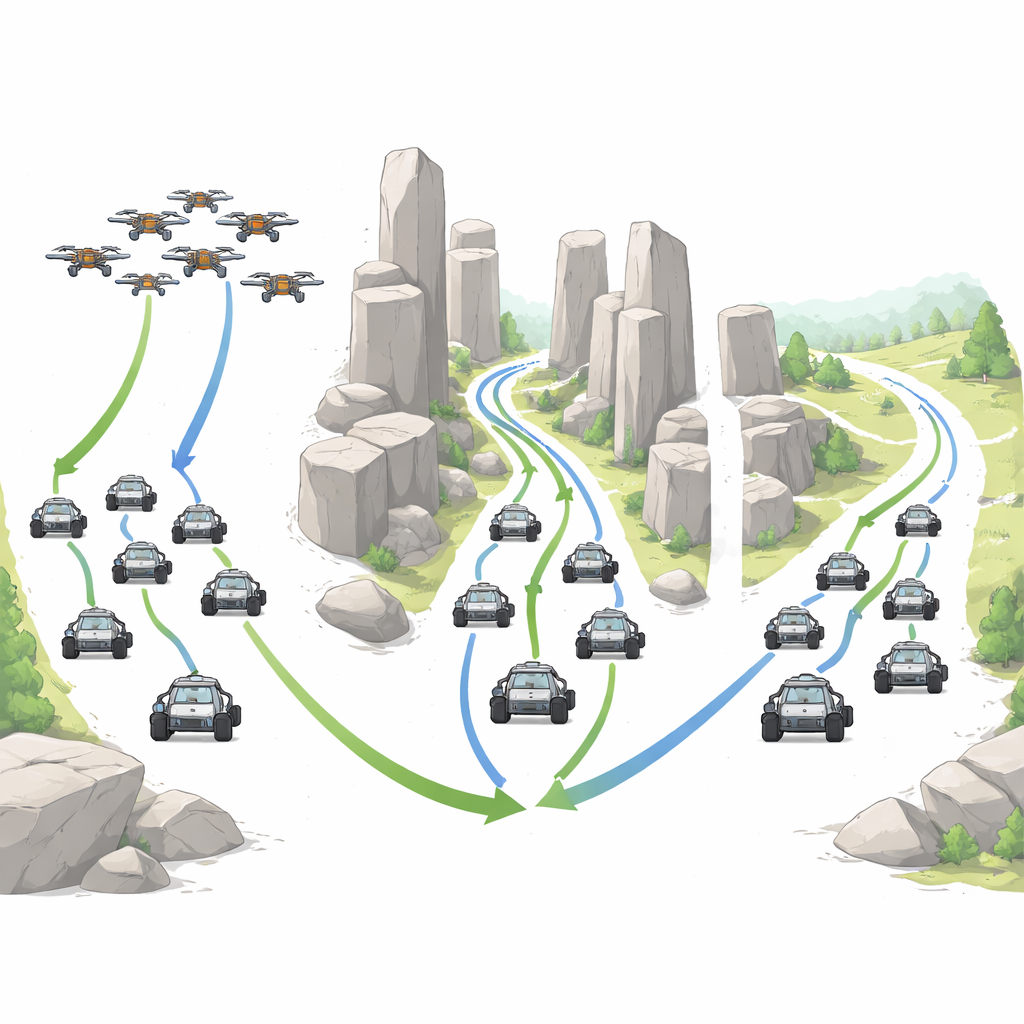
Formationu Dar Alanlardan Geçirirken Nefes Almasını Sağlamak
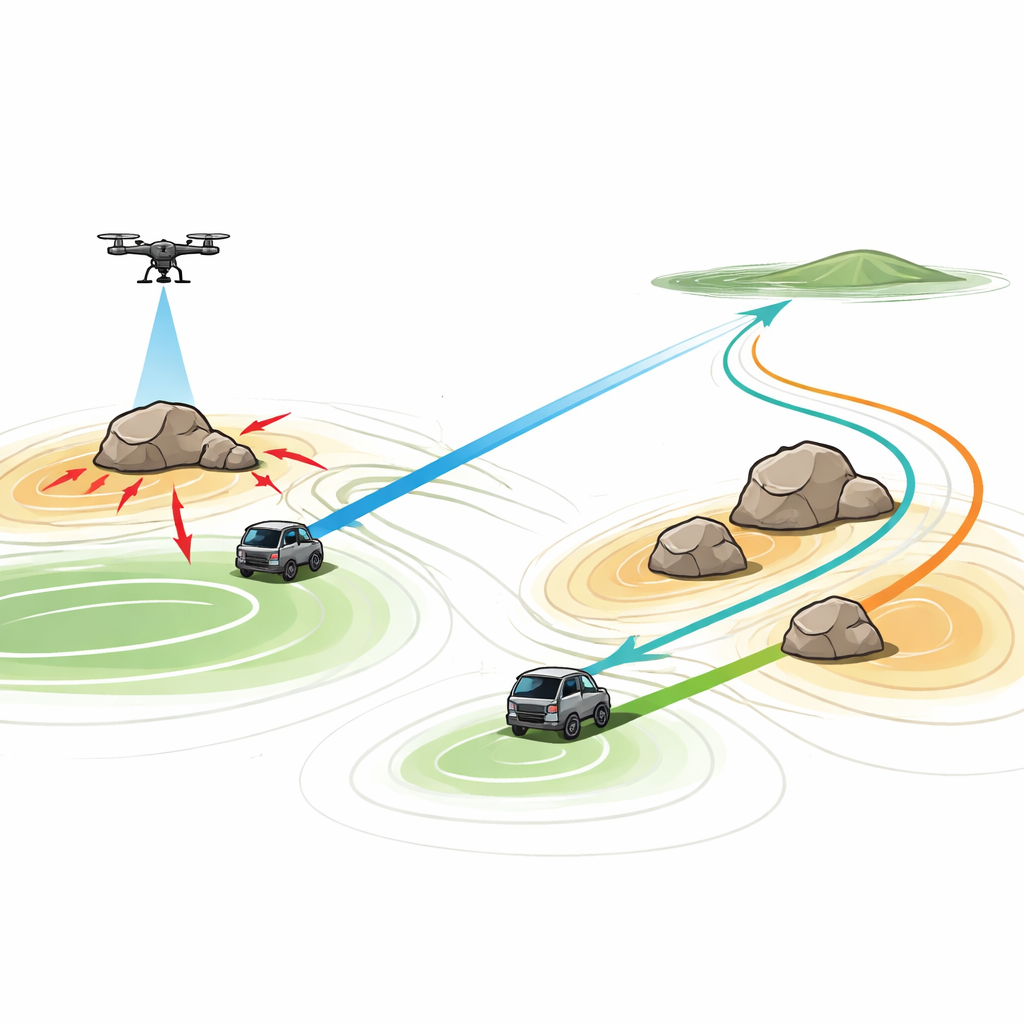
Gerçek ortamlar nadiren açık alanlardır; binalar, ağaçlar, araçlar ve hareketli nesnelerle doludur. Açık alanda güvenli olan bir formation dar bir sokaktan ya da yoğun bir engel kümesinden geçmek için çok büyük olabilir. Önerilen yöntem, formationun temel yapısını korurken genel boyutunu pürüzsüz şekilde ölçeklendirmesine—küçültecek ya da genişletecek şekilde—izin veriyor. Takım, hedefin çekici, engellerin ise formationu iten bir yapay potansiyel alan kullanan lider bir kara aracı tanıtıyor. Geleneksel potansiyel alanların sıkışıp kalma veya titrek hareketlere neden olabilmesinin aksine, onların “uyarlanabilen güvenli” versiyonu engellerin robotları ne kadar güçlü iteceğini sürekli ayarlayarak güvenli mesafeyi korurken aşırı temkinli ya da tuzağa düşürmeyen bir davranış sağlıyor.
Karmaşık Engeller ve Hareket İçin Daha Akıllı Yollar
Potansiyel alan, çekim ve itim manzarasının her zaman en düşük noktasının hedefte olmasını sağlayacak şekilde daha da geliştiriliyor. Bu, formationun engeller arasında garip konumlarda mahsur kalmasını önlemeye yardımcı oluyor. İtici etkinin gücü, erken sinir ağı eğitiminden ödünç alınmış basit bir öğrenme kuralı kullanılarak anlık olarak ayarlanıyor. Robotlar engellere çok yaklaşınca itme otomatik olarak artıyor; yeterli boşluk olduğunda ise gevşiyor. Eğer çevre o kadar daralırsa ki ölçeklendirilmiş bir formation bile güvenli geçiş sağlayamazsa, yöntem bir geri dönüş mekanizması etkinleştiriyor: ekip kısa bir süre duraklıyor, varsayımsal bir güvenlik koridoru genişletiliyor ve sorunlu bölgenin etrafında daha güvenli bir rota yeniden planlanıp devam ediliyor.
Sanal Dünyalarda Test Etme
Yöntemin ne kadar iyi çalıştığını görmek için yazarlar drone ve kara araçlarından oluşan karışık takımlarla kapsamlı bilgisayar simülasyonları yürütüyorlar. Sadece birkaç engelin olduğu açık alanları, birçok bariyerle dolu yoğun labirentleri, hareketli engeller içeren sahneleri ve altıgen prizma gibi daha karmaşık 3B şekillere dönüşmesi gereken formationları test ediyorlar. Tüm bu durumlarda formation üç boyutta bir arada kalıyor, sabit ve hareketli engellerden güvenli şekilde kaçınıyor ve gerektiğinde boyutunu ayarlıyor. Robotlar bariyerlerin etrafında zikzak çizmek yerine pürüzsüz, verimli yollar izliyor. Klasik ve geliştirilmiş potansiyel alanlar, parçacık sürüsü optimizasyonu ile lineer ve doğrusal olmayan model öngörücü kontrol gibi popüler planlama yöntemleriyle karşılaştırıldığında, yeni yaklaşım genellikle daha kısa, daha düzgün ve daha az enerji tüketen yollar buluyor; ayrıca ağır optimizasyon temelli tekniklere kıyasla bunları daha hızlı hesaplıyor.
Gerçek Dünya Görevleri İçin Anlamı
Uzman olmayan biri için ana mesaj şu: makale, uçan ve kara robotlarından oluşan karışık ekiplerin, engellerle dolu 3B alanlarda tek, esnek bir gövde gibi hareket etmesini sağlamanın bir yolunu gösteriyor. Engeller belirdiğinde formationun dağılmak yerine bükülmesi, küçülmesi ve yeniden yönlenmesi mümkün oluyor; buna karşın birlik ve güvenlik korunuyor. Bu, afetler sırasında, endüstriyel denetimlerde ve güvenlik devriyelerinde daha hızlı ve daha güvenilir robot desteğine dönüşebilir. Mevcut çalışma simülasyonlarda gösterilmiş olup atanmış bir lider araca dayanırken, yazarlar daha hataya dayanıklı takımlar ve gerçek dünya deneyleri yönünde atılacak adımları da tartışıyor; bu da sıkı koordine hava–yer robot sürülerinin pratiğe daha da yakınlaşmasını sağlıyor.
Atıf: Chen, Q., Liu, X., Nie, W. et al. Safe formation scaling and motion planning for heterogeneous UAV–UGV teams in cluttered environments. Sci Rep 16, 9127 (2026). https://doi.org/10.1038/s41598-026-37211-9
Anahtar kelimeler: çoklu robot formasyonu, İHA UGV iş birliği, engelden kaçınma, hareket planlaması, sürü robotik