Clear Sky Science · tr
Basamaksız kol uzunluğu parametrelendirmesi ve uyarlanabilir kuvvet-tetiklemeli sönüm harmanlamasıyla üst ekstremite teleoperasyon eksoskeletonu
Güvenli bir mesafeden daha güvenli elle çalışma
Dünyadaki — ve uzaydaki — en tehlikeli işler bile hâlâ insan yargısı ve becerikliliği gerektiriyor. Hasarlı bir nükleer tesisi onarmak, patlayıcılarla uğraşmak ya da bir uzay aracını stabilize etmek gibi durumları düşünün. Bu çalışma, bir kişiye uzak bir robot kolunu kendi koluymuş gibi kontrol etme olanağı veren, aynı zamanda tehlikeden uzak tutan yeni bir tür motorlu kol eksoskeletonu sunuyor. Cihaz, farklı kol boylarına ve çevredeki değişen kuvvetlere uyum sağlarken robotun giyenin vücudunun doğal bir uzantısıymış gibi hareket etmesini ve “hissetmesini” sağlamaya odaklanıyor.
Uzaktan kollar neden önemli
Robotlar zaten su altında, afet bölgelerinde ve reaktörlerin içinde çalışıyor, ancak çoğu ya önceden programlanmış ya da basit joysticklerle yönlendiriliyor. Bu, koşullar aniden değiştiğinde yapabileceklerini sınırlandırıyor. Bir kişinin gerçek zamanlı olarak uzak bir robotu kontrol ettiği teleoperasyon sistemleri; insan karar verme yeteneğini robotun gücü ve erişimiyle birleştiren bir orta yol sunuyor. Önceki sistemler araçları hareket ettirebiliyordu ama genellikle kuvvetlere dair hassas geribildirimden yoksundu ve farklı kullanıcıların bedenlerine kolayca uyum sağlayamıyordu. Bunun sonucu hantal hareket, zayıf “hissetme” ve hem operatörde hem makinede ekstra yüke yol açan durumlar oldu.
Gerçekten uyum sağlayan giyilebilir bir robot kol
Araştırma ekibi, omuz, dirsek ve bilekle hizalanan yedi motorlu ekleme sahip giyilebilir bir üst ekstremite eksoskeletonu geliştirdi. Karbon fiber ve alüminyum gibi hafif malzemeler cihazı ağır ve hantallaştırıcı değil, tepki verebilir tutuyor. Önemli bir yenilik, eksoskeletonun üst kol ve önkol uzunluklarının sabit birkaç kademede değil, kesintisiz biçimde ayarlanabilmesi. Dahili elektrik sensörleri bulunan kayan raylar, kullanıcının gerçek kol uzunluğunu sürekli ölçerek bu bilgiyi dijital bir vücut modeline iletiyor. Sonuç olarak cihaz, her kişiye göre iç geometrisini otomatik olarak yeniden şekillendiriyor; bu da konforu artırıyor ve robotun hareketlerinin insan niyetlerine daha sadık olmasını sağlıyor. 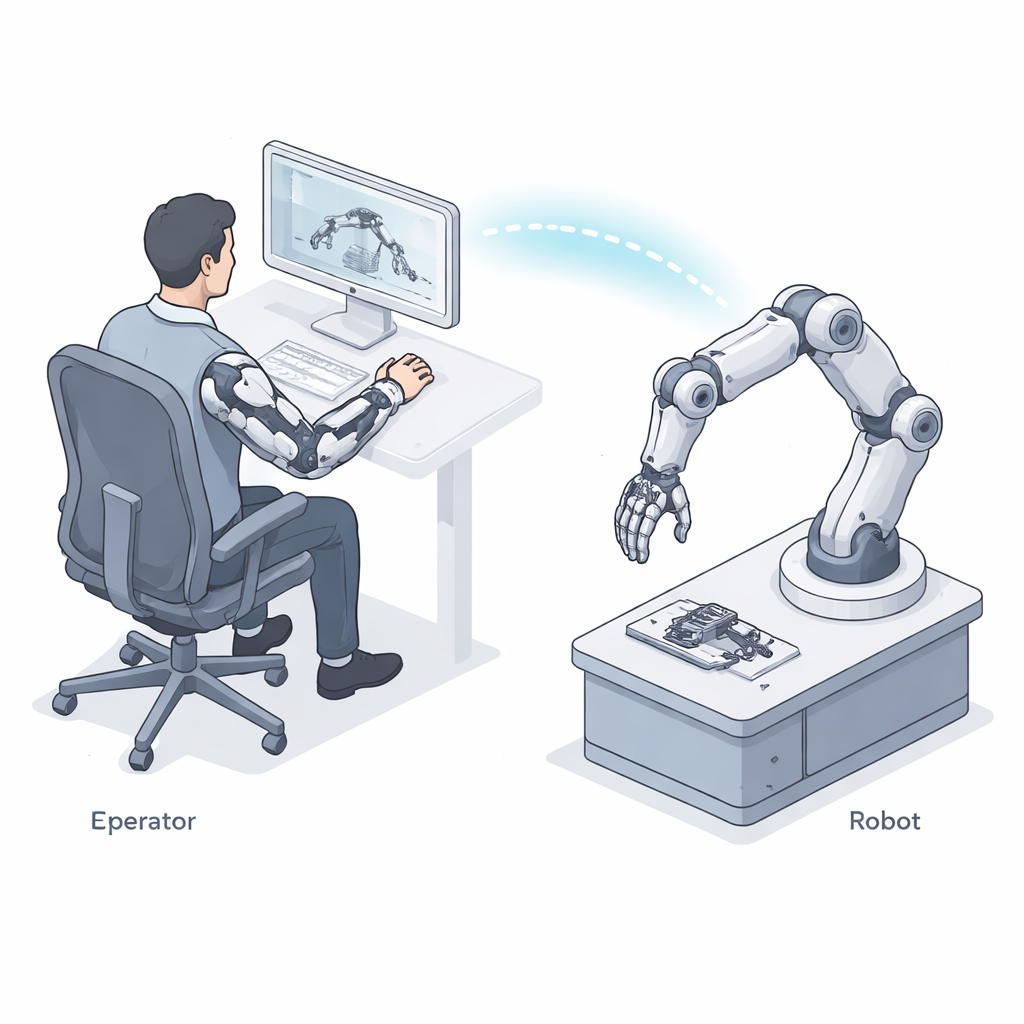
Vücutla birlikte hareket etmek, ona karşı değil
İnsan omuzları sadece menteşe gibi dönmez; kürek kemiği de kaburgalar üzerinde kayar. Birçok eksoskeleton bunu göz ardı eder ve doğal harekete karşı direnç göstererek rahatsızlığa yol açar. Bu tasarım, omuzun ve üst gövdenin ince kaymalarını sessizce izleyen birkaç ekstra serbestlik derecesine sahip pasif bir modül ekliyor, böylece cilt ve eklemler üzerindeki baskıyı azaltıyor. Aynı zamanda motorlu eklemler, torkları — burulma kuvveti — insan dokusu için güvenli sınırların altında kalacak şekilde ayarlanıyor. Acil durdurmalar ve sıkışma algılayıcıları gibi güvenlik özellikleri de sistemi bir şeyler ters gittiğinde hızla tepki verebilecek şekilde tamamlıyor.
Teması hissetmenin daha akıllı yolu
Mekaniğin ötesinde, yazarlar kullanıcının hissettiklerine odaklanıyor. Uzak robot bir şeye — bir duvara, bir alet sapına ya da başka bir nesneye — dokunduğunda veya itme uyguladığında, bu kuvvetler eksoskeleton aracılığıyla geriye iletilerek kullanıcıya direnç hissi veriliyor. Kontrol sistemi normalde çelişen iki gereksinimi harmanlıyor: operatör hareketlerinin doğru takibi ve temas kuvvetleri büyüdüğünde nazik, uyumlu davranış. Düşük kuvvetlerde sistem sert ve hassas davranarak kullanıcının kol yolunu yakından izliyor. Kuvvetler güvenlik eşiklerini geçtiğinde kontrol otomatik olarak yumuşuyor, böylece darbeler sarsıcı yerine yastıklanmış oluyor. Yazarlar, bu harmanlanmış davranışın salınıma dönüşmek yerine kararlı kaldığını göstermek için enerji tabanlı matematiksel araçlar kullanıyor. 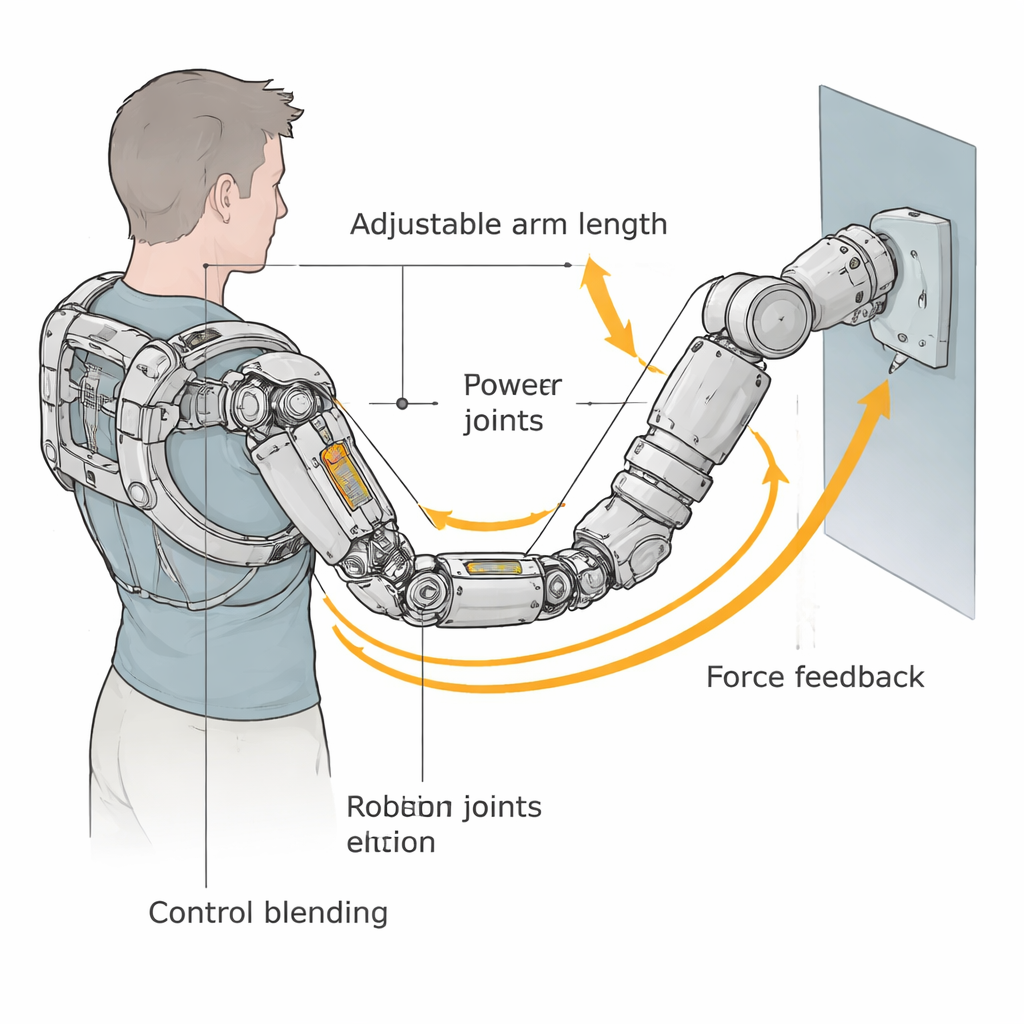
Sistemi teste sokmak
Eksoskeletonu değerlendirmek için araştırmacılar cihazı yaygın kullanılan bir endüstriyel robot kola bağladı. Eksoskeletonu giyen bir kişi havada sekiz şekli çizdiğinde, uzak robot iletişimdeki küçük gecikmelere rağmen hareketi yakından tekrarladı. Ek testler kol uzunluğu algılamanın ne kadar iyi çalıştığını inceledi: kayan sensörlerden gelen voltaj okumaları, tekrar tekrar giyip çıkarma sonrasında bile fiziksel ölçümlerle birkaç milimetreden daha az hata gösterdi. Robotun sanal bir sert duvara bastığı kontrollü simülasyonlarda, tam kontrol şeması temel bir kurulumla karşılaştırıldığında tepe temas kuvvetlerini yaklaşık yüzde 70 oranında azalttı ve serbest harekette takibi büyük ölçüde korudu.
Gerçek dünya işler ve bakım için anlamı
Günlük ifadeyle bu araştırma, uzak robotları kendi kolunu hareket ettiriyormuş gibi doğal ve güvenli hissettirecek noktaya yaklaştırıyor. Vücudu saran, ayarlanabilir bir çerçeve, insan hareketinin dikkatli takibi ve anında uyum sağlayan akıllı kuvvet geribildiriminin birleşimiyle sistem, tehlikeli ortamlarda daha hassas ve daha az yorucu teleoperasyon sözü veriyor. Aynı teknoloji inme sonrası iyileşen hastalara da hizmet edebilir; terapistler kol hareketlerini yönlendirip kaydederken hastalar gerçekçi destek ve geribildirim alabilir. Gelecek sürümler kaslardan ve bakış yönünden gelen sinyalleri entegre edip deneyimle öğrenmeye başladıkça, bu tür eksoskeleton–robot çiftleri hem aşırı görevler hem de günlük rehabilitasyon için çok yönlü araçlar hâline gelebilir.
Atıf: Zeng, P., Xu, Y., Zheng, S. et al. An upper-limb teleoperation exoskeleton with stepless arm-length parameterization and adaptive force-triggered impedance blending. Sci Rep 16, 7529 (2026). https://doi.org/10.1038/s41598-026-37205-7
Anahtar kelimeler: teleoperasyon eksoskeletonu, robotik kol kontrolü, kuvvet geribildirimi, rehabilitasyon robotikleri, uzaktan tehlikeli operasyonlar