Clear Sky Science · tr
Tünel kazaları için uçtan uca acil müdahale protokolünün takviye öğrenme ile güçlendirilmesi
Neden daha akıllı tünel kurtarmaları önemli
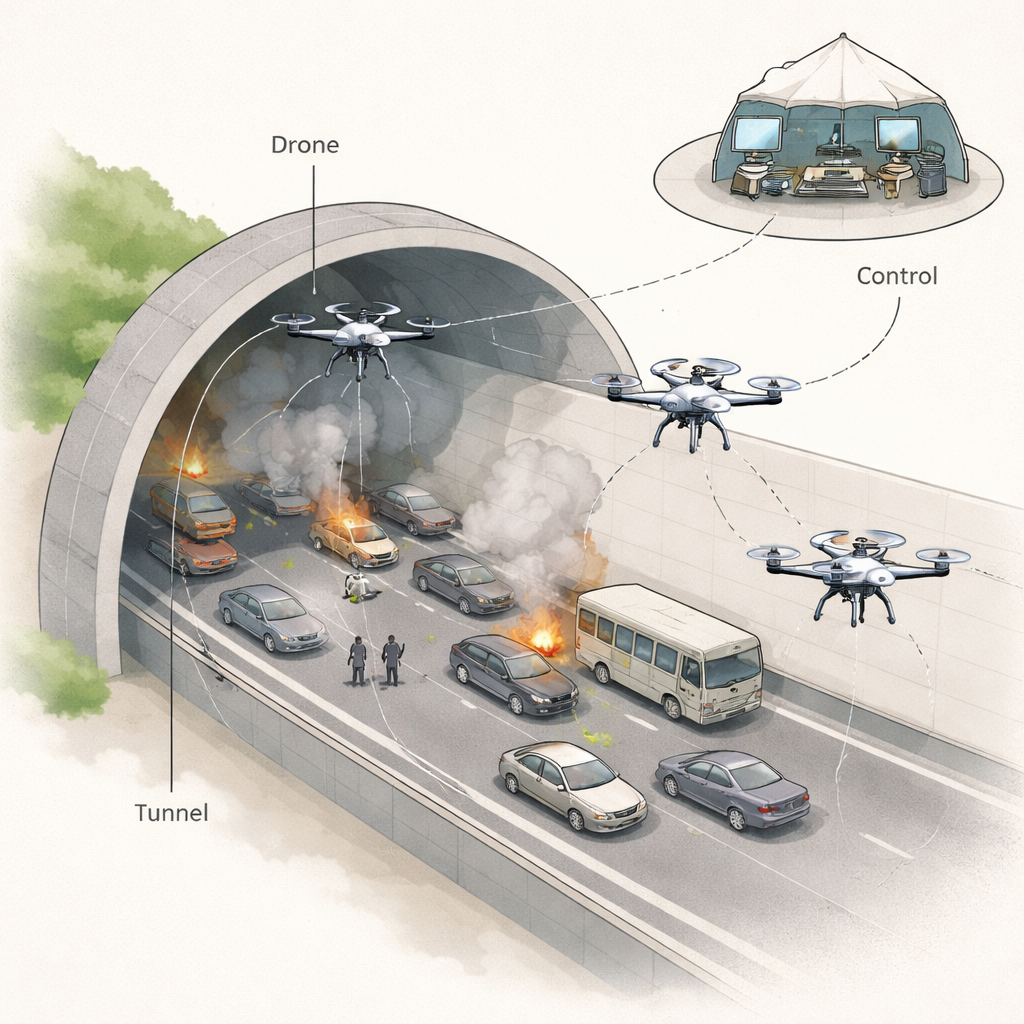
Bir karayolu tünelinde kaza, yangın veya yapısal çökme gibi bir felaket meydana geldiğinde—insanlar çok az çıkışı olan uzun, dumanlı, labirent benzeri bir borunun içinde mahsur kalabilir. Görüş azalırken, sıcaklık yükselirken ve enkaz yolları kapatırken insan kurtarıcılar aceleyle içeri girmek zorunda kalır. Bu çalışma, küçük uçan robotların veya dronların, zeki bir öğrenme stratejisiyle yönlendirildiklerinde bu tehlikeli durumlarda hızlı ve güvenilir yardımcılar haline gelebileceğini; mağdurları bulup güvenli yolları haritalandırırken insan ekipleri en kötü tehlikelerden uzak tutabileceğini araştırıyor.
Tehlikeli yeraltı dar boğazları
Modern şehirler otoyollar, trenler ve altyapılar için tünellere güveniyor, ancak verimlilik sağlayan aynı kapalı tasarım, içindeki kazaları alışılmadık derecede ölümcül kılıyor. Yangınlar dumanı hızla yayar, zehirli gazlar birikir ve dar geçitler çarpışan araçlar veya düşen betonla tıkanabilir. Geleneksel kurtarma ekipleri genellikle sınırlı bilgiyle girer, nereye gideceklerini tahmin ederken radyoları kalın kaya ve betonun içinden iletişim kurmakta zorlanır. Çin ve Japonya başta olmak üzere geçmiş felaketler, mağdurlara zamanında ulaşmanın ne kadar zor olduğunu gösterdi ve insanların göremediği ve öngöremediği şekillerde “görüp düşünebilen” araçlara olan ihtiyacı vurguladı.
Dronlara keşif ve aramayı öğretmek
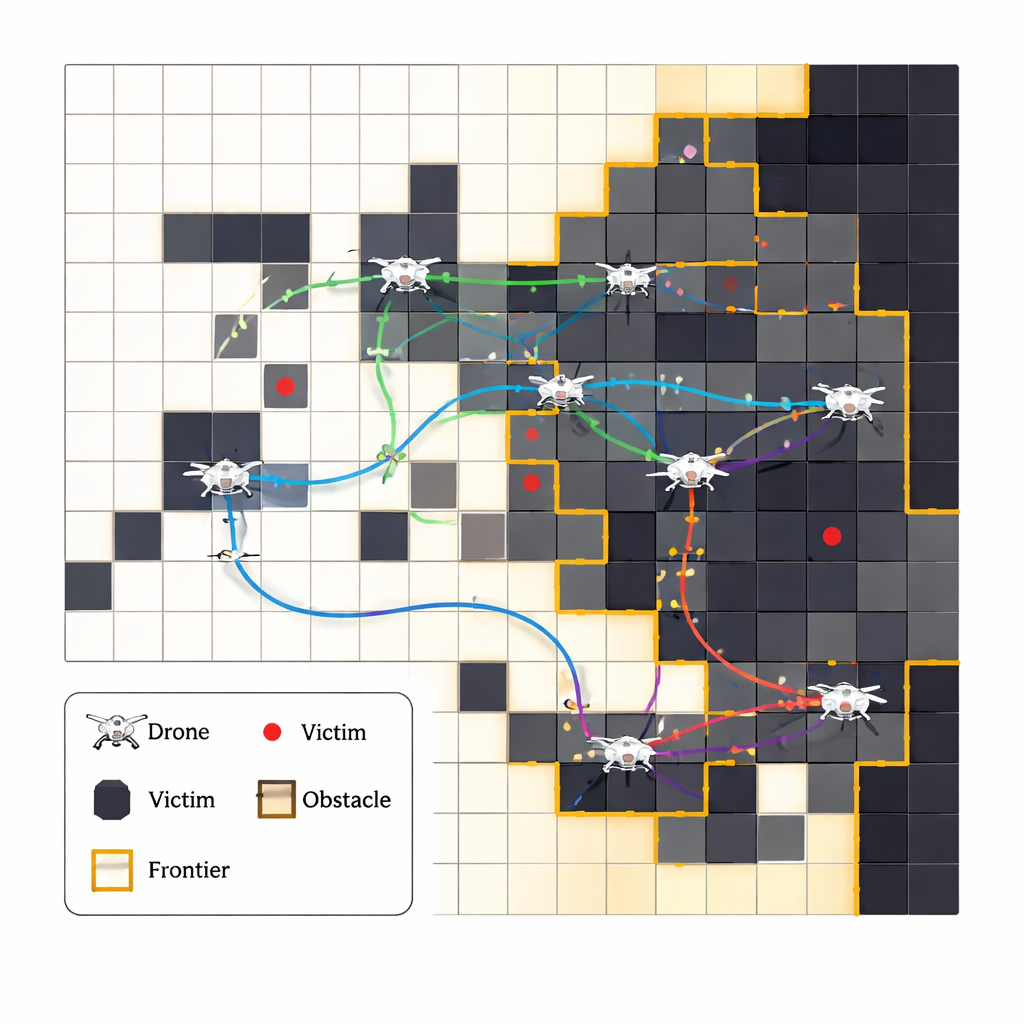
Yazarlar, birden çok otonom dronun birlikte çalışarak hasar görmüş bir tüneli keşfettiği, canlı bir harita oluşturduğu ve sıkışmış insanları bulduğu bir sistem öneriyor. Sabit, önceden programlanmış bir rotayı takip etmek yerine her dron, takviye öğrenme adı verilen bir yöntemle deneyimden öğrenir: eylemleri dener, ne olduğunu görür ve zamanla hangi seçimlerin daha hızlı kurtarmalara ve daha az hataya yol açma eğiliminde olduğunu keşfeder. Tünel hücrelerden oluşan bir grid olarak temsil edilir ve dronlar bilinen alanın bilinmeyenle buluştuğu “sınır” noktalarına odaklanarak bu sınırı sürekli dışa doğru iter. Her adımda küçük bir grid hareketi seti arasından seçim yaparlar ve benzer durumlarda hangi hareketlerin en iyi sonuç verdiğine dair içsel tablolarını güncellerler.
Çok sayıda robotu iletişimsiz nasıl işbirliğine sokarsınız
Aynı tüneli eş zamanlı aramak için birkaç dron kullanmak yeni bir zorluğu gündeme getirir: özellikle iletişim güvenilmez olabileceğinde, birbirlerine çarpmaktan veya aynı alanı tekrar tekrar taramaktan nasıl kaçınırlar? Onlara merkezi bir lider ya da sürekli radyo trafiği vermek yerine, araştırmacılar iyi grup davranışını sessizce teşvik eden basit bir puanlama sistemi tasarlıyor. Bir dron yeni bir mağdur bulduğunda büyük bir ödül kazanır, ancak aynı yeri tekrar ziyaret ederek zaman kaybederse, başka bir drona çarparsa veya bataryasını tüketerek “başarısız” olursa cezalandırılır. Zamanla bu, her dronun keşfedilmemiş bölgelere yönelmesini ve takım arkadaşlarından uzak durmasını teşvik eder; böylece her biri teknik olarak kendi başına öğrenirken paylaşılan sonuçlardan doğal olarak bir tür işbirliği ortaya çıkar.
Sıkışmayı önlemek için kurtlardan ödünç alınan taktikler
Saf deneme‑yanılma öğrenmesi bazen güvenli ama ikinci derecede alışkanlıklarda takılı kalabilir—örneğin her zaman tanıdık bir koridoru seçmek, riskli ama daha kısa bir kestirmeyi denememek gibi. Dronların meraklı kalmasını sağlamak için ekip, gri kurtların sürü halinde avlanma davranışını modelleyen matematiksel bir yaklaşımdan fikirler ödünç alıyor. Bu “Gri Kurt Optimizasyonu” bileşeni, dronları zaman zaman şimdiye kadar görülmüş en iyi arama desenlerini taklit etmeye yönlendirirken keşfe de yer bırakıyor. Uygulamada bu, hangi yeni eylemlerin deneneceğini şekillendirir; öğrenme sürecinin çıkmazlardan sıçramasına ve tünel değiştiğinde—örneğin bir güzergâhın aniden yangın veya enkazla kapanması durumunda—adaptasyona yardımcı olur.
Sanal felaketlerde yaklaşımın test edilmesi
Kanıtlanmamış stratejileri gerçek acil tünellerde denemek güvenli olmadığından, araştırmacılar dar koridorları, çıkmazları, engelleri ve dağınık mağdurları taklit eden ayrıntılı bilgisayar simülasyonları kuruyor. Öğrenme tabanlı sistemlerini saf rastgele dolaşma ve öğrenme olmadan çalışan tek başına optimizasyon gibi birkaç başka yöntemle karşılaştırıyorlar. Tek dronlu ve çok dronlu testlerin her ikisinde de yaklaşımları mağdurları daha hızlı buluyor, tünelin daha fazlasını daha az boşa harcanmış adımla keşfediyor ve çarpmalardan daha güvenilir şekilde kaçınıyor. Önemli olarak, bunu güç tüketen derin öğrenme ağları yerine hafif, tablo tabanlı hesaplamalar kullanarak yapıyor; bu da gerçek bir acil durumda küçük yerel bilgisayarlarda çalıştırılmasını pratik hale getirebilir.
Gelecek kurtarmalar için bunun anlamı ne olabilir
Çalışma, doğadan ödünç alınan birkaç fikir ve dikkatle tasarlanmış öğrenme kurallarıyla yönlendirilen nispeten basit dron sürülerinin, tünel felaketlerinde itfaiye ve kurtarma ekipleri için değerli ortaklar haline gelebileceğini gösteriyor. Dumanlı, değişken ortamları hızla haritalandırıp sürekli insan kontrolüne ihtiyaç duymadan muhtemel mağdur konumlarına yönelerek bu tür sistemler müdahale sürelerinden önemli dakikalar kazandırırken ilk müdahale ekiplerinin karşılaştığı riskleri azaltabilir. Şu ana kadar yapılan çalışmalar simülasyonlara ve ideal sensörlere dayansa da, zaman, enerji ve hesaplama sınırlamalarının sıkı olduğu dünyanın en zorlu kurtarma ortamlarında çalışması gereken gerçek dünya sistemleri için pratik bir temel oluşturuyor.
Atıf: ur Rehman, H.M.R., Gul, M.J., Younas, R. et al. End-to-end emergency response protocol for tunnel accidents augmentation with reinforcement learning. Sci Rep 16, 6226 (2026). https://doi.org/10.1038/s41598-026-37191-w
Anahtar kelimeler: tünel acil müdahale, arama kurtarma dronları, çok ajanlı takviye öğrenmesi, robotik afet yönetimi, özerk keşif