Clear Sky Science · tr
Genişletilmiş Kalman filtresi ile dinamik enerji depolamalı şarj robotu için pil SOC’unun gerçek zamanlı tahmini ve otonom şarj stratejisi
Neden daha akıllı robot pilleri önemli?
Depo kuryelerinden denetim botlarına kadar mobil robotların faydası büyük oranda pillerinin izin verdiği düzeyle sınırlıdır. Bir robot enerji seviyesini yanlış değerlendirirse, bir şarj cihazından uzak bir yerde durabilir; bu işin kesintiye uğramasına ve pilin zarar görme riskine yol açar. Bu makale, robotların gerçek zamanlı olarak gerçek pil seviyesini “bilmesini” ve ne zaman ve nasıl şarj edeceklerine karar vermesini sağlayan yeni bir yöntemi sunuyor; böylece daha uzun, daha güvenli ve insan gözetimini daha az gerektiren şekilde çalışabiliyorlar.

Robotlar, yoğun işler ve stres altındaki piller
Otoyollarda sakin seyredebilen elektrikli arabalardan farklı olarak birçok mobil robot keskin hızlanmalar, duruşlar ve sık iş yükü değişimleriyle karşılaşır. Bu sarsıntılar pil akımı ve voltajında hızlı dalgalanmalara yol açar ve kalan şarjı tahmin etmede geleneksel yöntemleri yanıltır. Pil voltajını okumaya ya da zaman içinde akımı saymaya dayanan basit yöntemler genellikle sakin, dengeli koşullar varsayar ve pilin yaşı veya ısınmasını takip etmez. Sonuç olarak tahminleri sapar, hatalar birikir ve robot ya çok sık şarj olur ya da pili fazla zorlar; bu da pil ömrünü kısaltır.
Pilin içindeki süreçlerin daha akıllı bir modeli
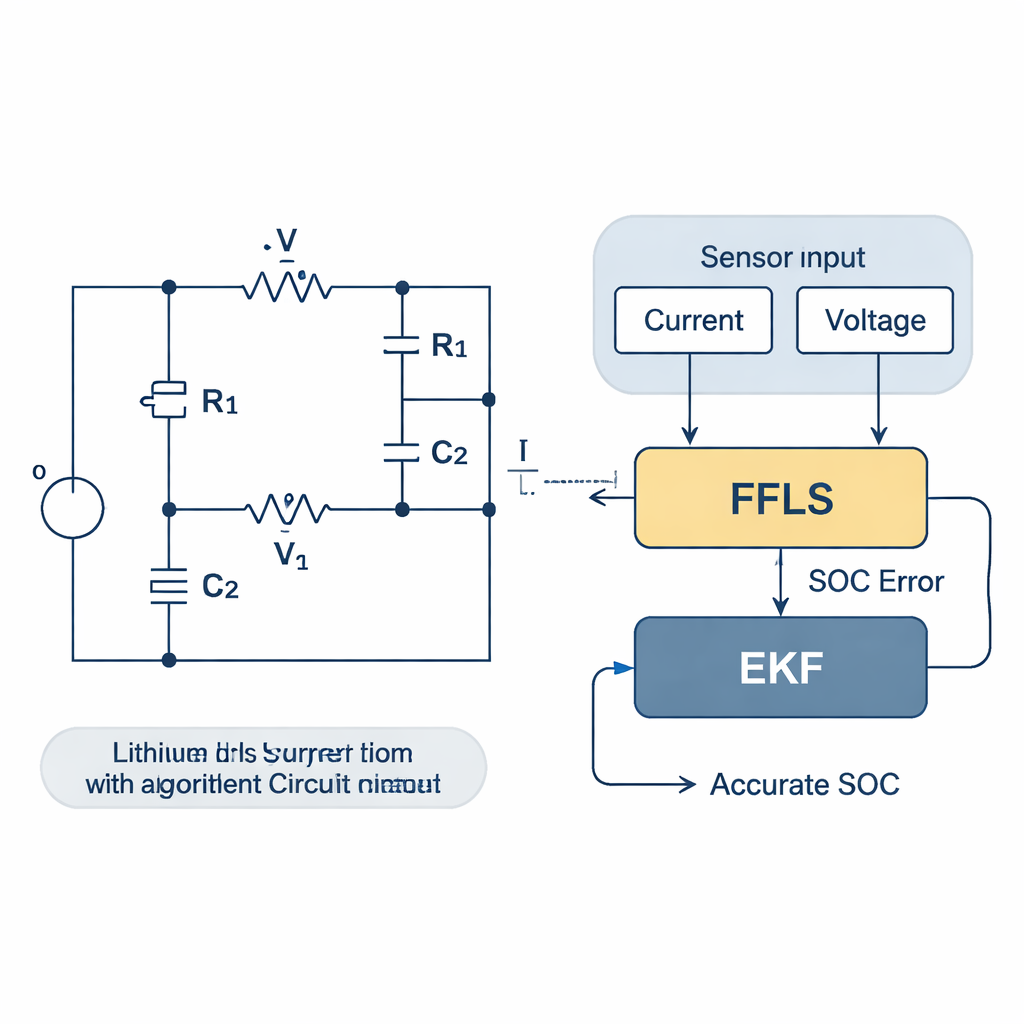
Yazarlar bunun üstesinden gelmek için robota lityum demir fosfat pil paketinin daha gerçekçi bir resmini sunuyor. Pili tek bir voltaj sayısı olan kara kutu gibi ele almak yerine, iç direnç ve hücre içindeki iyonların hareketini ve birikimini taklit eden iki “polarizasyon” dalı içeren bir elektriksel ağ olarak temsil ediyorlar. Bu ikinci dereceden RC model, yük değişimlerine verilen hızlı ve yavaş tepkileri yakalar. Robot sürekli olarak akım ve voltajı ölçer ve bu sinyalleri, değişen koşullarda eski verilerin etkisini azaltmak için son verilere daha fazla ağırlık veren bir “unutma faktörü” içeren en küçük kareler yöntemiyle modele uydurur.
Algoritmanın anında öğrenmesine ve uyum sağlamasına izin vermek
Bu modelin üzerine araştırmacılar, gürültülü verilerde gizli durumları izlemek için yaygın olarak kullanılan genişletilmiş Kalman filtresini uyguluyor. Buradaki gizli durum pilin gerçek şarj durumu. Robot çalışırken filtre, model ve ölçülen akıma dayanarak şarjın nasıl değişmesi gerektiğini tahmin eder, sonra bu tahmini ölçülen voltajla düzeltir. Unutma faktörlü en küçük kareler modülü önemli model parametrelerini çevrimiçi olarak güncellemeye devam eder, böylece filtre asla fabrikada kalibre edilmiş, eskimiş bir pil tanımına güvenmez. Akıllıca bir hamleyle araştırmacılar iç direnç ile polarizasyon kapasitansı adı verilen bir nicelik arasındaki ilişkiyi de kullanıyor: sıcaklık arttıkça direnç düşer ve kapasitans artar. İkisini birlikte izleyerek sistem herhangi bir fiziksel sıcaklık sensörü olmadan sıcaklık etkilerini çıkarabilir ve modeli buna göre ayarlayabilir.
Robotlara ne zaman ve nasıl şarj olacaklarını öğretmek
Doğru şarj tahminleri hikâyenin sadece yarısı; diğer yarısı robotun bunları nasıl kullandığıdır. Yazarlar hem sürekli “tıkama”yı hem de derin deşarjı önleyen bir otonom şarj stratejisi tasarlıyor. Üst ve alt şarj sınırları tanımlanıyor: pil bir eşik değerin altına düşerse robot önce bir istasyona dönmeyi önceliklendiriyor; eğer zaten üst sınıra yakınsa şarjı erteleyip çalışmaya devam ediyor. Güvenli aralık içinde robot boş zaman anlarında şarj oluyor. Sistem ayrıca pil paketindeki her hücreyi izleyip bunların şarjını dengeleyerek hiçbir hücrenin diğerleri geride kalırken aşırı doldurulmamasını sağlıyor; bu premature yaşlanmayı önlemede kilit bir adım. Rota ve bağlanma süresini kısaltmak için robot oda düzeyinde navigasyonu kısa menzilli kızılötesi kılavuzlukla birleştiriyor.
Daha uzun ömürlü, daha güvenilir robot güç kaynağı
Kamusal pil veri setleri, simülasyonlar ve gerçek robotlar kullanılarak yapılan testlerde yeni yöntem, şarj durumunu yaklaşık %98 doğrulukla tahmin etti ve parça filtreleri, sinir ağları ve Transformer tabanlı birkaç gelişmiş alternatifin net biçimde önüne geçti. Bu yaklaşımla yönetilen piller, simüle edilmiş haftalar boyunca şarjlarını daha iyi korudu ve rakip yöntemlere kıyasla %15–40 daha fazla şarj–deşarj döngüsüne dayandı. İç direnç daha yavaş arttı; bu, hücrelerin daha sağlıklı olduğuna işaret ediyor ve robotlar daha yüksek pil sağlığını korurken daha az süreyle istasyonda kaldı. Bir teknisyenin dışındaki okuyucu için çıkarım şudur: bu teknik robotların kendi pillerinin daha iyi “bakıcısı” olmalarını sağlar: enerjilerini daha hassas değerlendirebilir, şarj için daha akıllı zamanlar seçebilir ve ek sensörler veya ağır hesaplama gücü gerektirmeden pahalı pil paketlerinin çalışma ömrünü sessizce uzatabilir.
Atıf: Zhou, Y., Liang, X., Li, W. et al. Real time estimation of battery SOC and autonomous charging strategy for dynamic energy storage charging robot with extended Kalman filter. Sci Rep 16, 7810 (2026). https://doi.org/10.1038/s41598-026-37184-9
Anahtar kelimeler: mobil robotlar, pil şarj durumu, otonom şarj, genişletilmiş Kalman filtresi, lityum demir fosfat piller