Clear Sky Science · tr
Deformable konvolüsyon ağları ve kanal‑kanal koordinat dikkatini kullanan araç tespiti için YOLO‑DC
Kameralardan araç tespiti neden gerçekten önemli
Modern şehirler, yoğun yolları izleyen kameralara dayanır; bu kameralar trafik sıkışıklığını yönetmeye yardımcı olur ve otonom araçların yolunu açar. Ancak bu kamera akışlarında her aracı güvenilir şekilde ayırt etmek şaşırtıcı derecede zordur; uzakta küçük görünen, trafik içinde kısmen gizlenmiş veya yağmur, sis ya da karanlık nedeniyle bulanıklaşmış araçlar özellikle sorun çıkarır. Bu makale, dağınık gerçek dünya koşullarında ve sınırlı hesaplama gücüne sahip aygıtlarda bile otomobilleri, otobüsleri ve diğer araçları hızlı ve doğru şekilde tespit etmeyi amaçlayan yeni bir bilgisayar görüsü sistemi olan YOLO‑DC’yi tanıtıyor.
Araştırmanın arkasındaki trafik sorunu
Büyüyen şehirler, tıkalı yollar, artan kaza sayıları ve yükselen emisyonlarla karşılaşıyor. Akıllı ulaşım sistemleri, trafiği gerçek zamanlı izleyip insan ve otonom sürücüleri yönlendirerek yardımcı olma potansiyeli sunuyor. Temel unsur, videoda hızlı ve güvenilir araç tespitidir. Önceki “iki aşamalı” algoritmalar görüntüleri birden fazla geçişte tarar ve çok doğru olabilir, fakat genellikle yol kenarı kameralarında veya araç içi gerçek zamanlı kullanım için çok yavaştır. YOLO (You Only Look Once) ailesi gibi daha yeni “tek aşamalı” sistemler, biraz karmaşıklığı feda ederek çok daha yüksek hız sağlar ve pratikte popülerdir. Yine de küçük, üst üste binen araçlar ve detayları gizleyen zorlu hava koşullarıyla başa çıkmakta zorlanırlar. YOLO‑DC, en son YOLOv8 modelinin üzerine inşa edilerek iç katmanlarını bu zorluklara daha iyi dayanacak şekilde yeniden tasarlıyor.
YOLO‑DC, daha akıllıca odaklanarak daha fazlasını nasıl görüyor
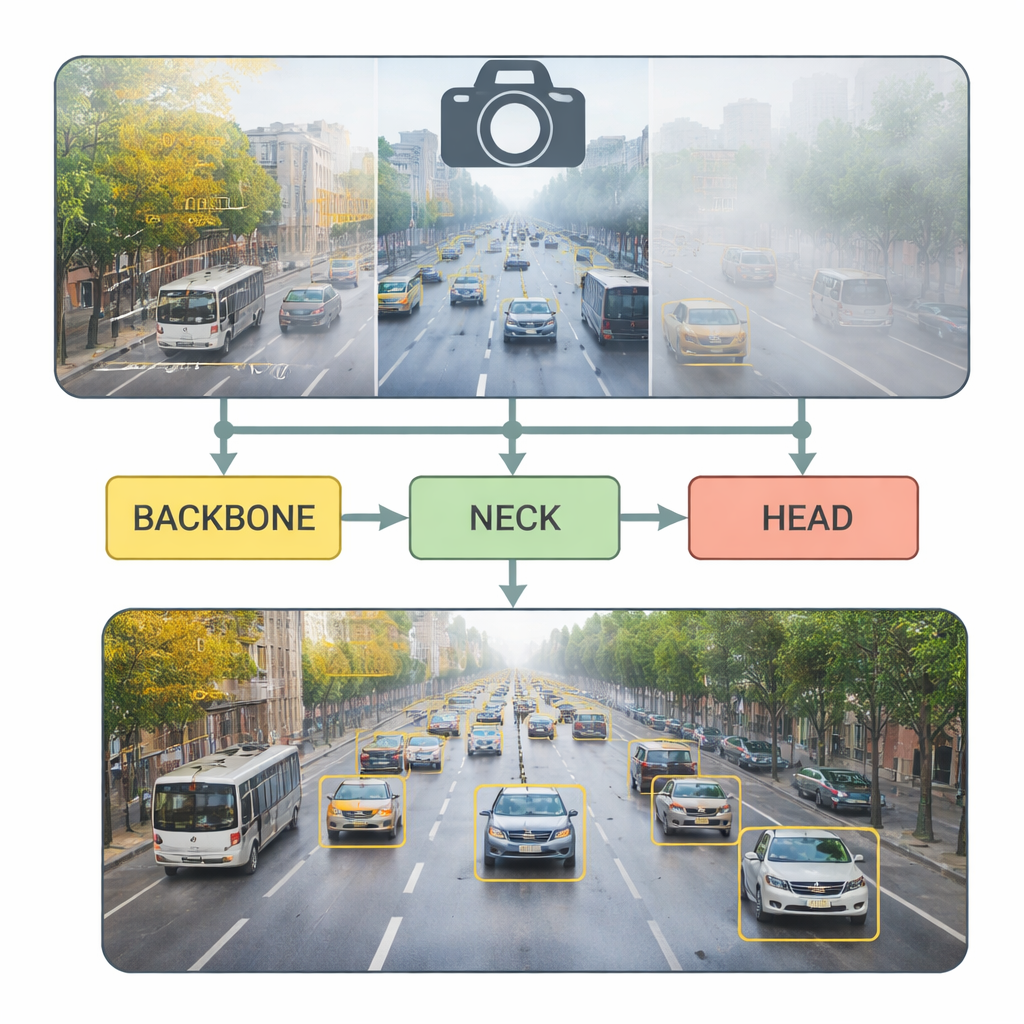
YOLO‑DC’nin merkezinde, ham görüntüleri önce soyut özelliklere dönüştüren yenilenmiş bir “omurga” ağı vardır. Yazarlar, ağın görüntüde nereye bakacağını ve hangi görsel desen türlerine daha fazla ağırlık verilmesi gerektiğini etkili biçimde öğreten kanal‑kanal koordinat dikkat adı verilen bir mekanizma sunuyor. Eğilip araçların eğimli veya garip şekillerini takip edebilen deformable konvolüsyonlar—örnekleme düzenini bükebilen filtreler—ile birleştirildiğinde, bu omurga farklı açılardan, ölçeklerden ve konumlardan görülen araçlara daha iyi uyum sağlayabiliyor. Yola ait her bölgeyi eşit işlem yerine sistem, gerçek araçları binalardan, ağaçlardan ya da yol işaretlerinden ayıran belirgin kontur ve dokulara vurgu yapmayı öğreniyor.
Küçük ve uzaktaki araçları yavaşlatmadan yakalamak
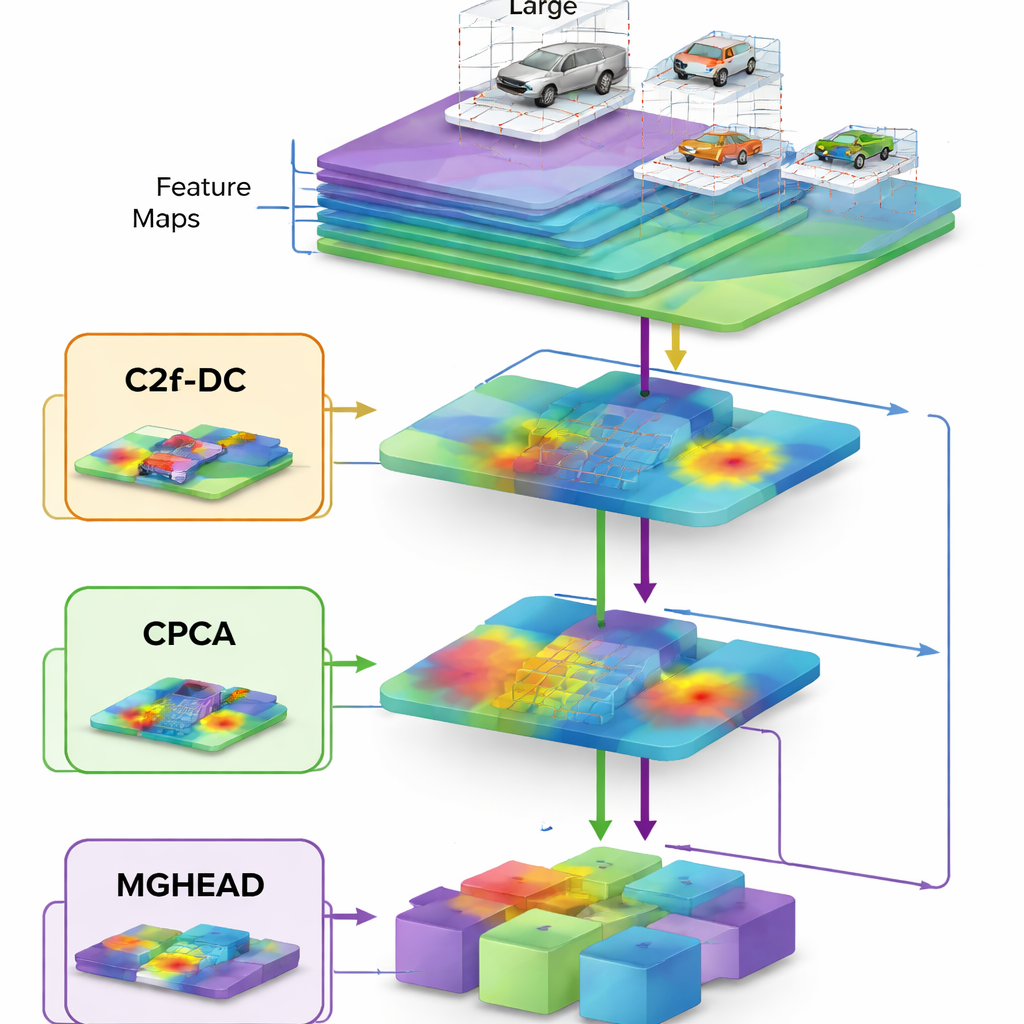
Modelin orta kısmı, yani boyun (neck), kaba, uzak görünümlerle ince, yakın ayrıntıları birleştirmekten sorumludur. YOLO‑DC bu aşamayı iki şekilde geliştiriyor. Birincisi, kanal öncelik dikkati modülü ağın gürültüyü bastırmasına ve karede uzakta çok küçük görünen araçlardan gelen ince ipuçlarını vurgulamasına yardımcı oluyor. İkincisi, hafif FasterNet mimarisinden esinlenen yeniden tasarlanmış bir blok, verinin yalnızca bir bölümüne tam konvolüsyon uygulayıp sonra verimli biçimde karıştırarak işlem sayısını azaltıyor. Bu dikkatli yeniden tasarım, hem parametre sayısını hem de bellek trafiğini düşürerek modelin daha hızlı çalışmasını sağlarken doğruluğu gerçekten artırıyor—kenar cihazlar, trafik kameraları ve araç içi bilgisayarlar için nadir fakat çok arzu edilen bir kombinasyon.
Farklı boyutlardaki ve kötü hava koşullarındaki araçları görmek
Son aşama veya başlık (head), nesnelerin nerede olduğunu ve ne olduklarını belirler. YOLO‑DC burada çok ölçekli gruplanmış konvolüsyonlar tanıtıyor; özellik haritalarını birkaç kanal grubuna bölerek her grubun farklı filtre boyutları kullanmasını ve sonra bunların yeniden birleştirilmesini sağlıyor. Bu, dedektöre ölçek hakkında daha zengin bir algı kazandırıyor; böylece çerçeveyi dolduran dev otobüsleri, orta boy kamyonları ve uzakta zar zor görünen küçük otomobilleri aynı anda tanıyabiliyor. Bulutlu, güneşli, yağmurlu ve gece koşullarını içeren UA‑DETRAC veri kümesi üzerinde yapılan kapsamlı testlerde YOLO‑DC, en iyi düzeydeki dedektörlerle aynı doğruluğu yakaladı veya aştı; bunu yaparken yalnızca onların hesaplamasının küçük bir kısmını kullanıp modern donanımda saniyeler içinde yüzlerce kare işleyebildi. Sis, yağmur, kar ve kum fırtınaları için özel olarak tasarlanmış DAWN veri kümesinde ise yeni model, özellikle yoğun yağmur ve yoğun sis koşullarında geleneksel sistemlerin sıklıkla başarısız olduğu durumlarda önemli kazanımlar sağladı.
Sonuçların günlük yollar için anlamı
Uzman olmayanlar için ana mesaj şudur: YOLO‑DC, gerçek trafiğin nasıl göründüğünü—kalabalık, dağınık ve sık sık kötü hava veya zayıf aydınlatma tarafından örtülen hâlini—daha iyi “görür”. Araç şekillerini takip eden esnek filtreleri, en bilgilendirici bölgelere odaklanan dikkat mekanizmalarıyla birleştirerek sistem daha fazla araç tespit ediyor, daha az kaçırıyor ve mütevazı donanımlarda canlı video analizine yetecek kadar hızlı çalışıyor. Bu da daha akıllı trafik yönetimi, daha güvenilir kaza izleme ve daha güvenli otonom sürüş için umut verici bir yapı taşı olmasını sağlıyor—ve tüm bunları şehir sokaklarına ve geleceğin araçlarına yaygın olarak konuşlandırılabilecek kadar düşük işlem maliyetiyle yapıyor.
Atıf: Liu, Z., Zhu, M., Gao, B. et al. YOLO-DC for vehicle detection using deformable convolutional networks and cross-channel coordinate attention. Sci Rep 16, 6284 (2026). https://doi.org/10.1038/s41598-026-37094-w
Anahtar kelimeler: araç tespiti, akıllı ulaşım, YOLO, olumsuz hava koşulları, gerçek zamanlı görüntüleme