Clear Sky Science · tr
Yük farkındalıklı hareket profillemesi ile çoklu AGV sistemlerinin zamanlaması için dinamik zincir
Depo robotlarının daha iyi zamanlamaya neden ihtiyacı var
Çevrimiçi alışveriş, depoları hızla, güvenli şekilde ve 7/24 taşınması gereken ürünlerle doldurdu. Birçok tesis artık rafları ve paletleri taşımak için kat robotları—Otomatik Yönlendirilen Araçlar (AGV)—filolarına güveniyor. Ancak bu robotlar hareketleri hakkında aşırı basitleştirilmiş varsayımlarla planlanırsa zaman kaybedebilir, kırılgan paketleri sarsabilir veya hatta çarpışma riski oluşturabilirler. Bu makale, gerçek fiziksel davranışlarını hesaba katarak birçok AGV’yi aynı anda planlamanın ve koordine etmenin yeni bir yolunu sunuyor; bu, yoğun depolarda daha düzgün trafik ve daha güvenli kargo vaat ediyor.
Sadece sayı değil, yük taşıyan robotlar
Günümüz AGV’leri zaten depolarda, havaalanlarında ve fabrikalarda karşıdan karşıya dolaşıyor; arabaları çekiyor veya rafları ve paletleri kaldırıyorlar. Bu filoları yöneten mevcut yazılımların çoğu yüksek seviyede çalışır: hangi robotun hangi işi yapacağını ve yaklaşık hangi güzergâhı izleyeceğini belirler. Matematiği basitleştirmek için genellikle iki nokta arasındaki seyahat süresinin sabit olduğunu varsayar; bir robotun gerçekte ne kadar hızlı hızlanıp yavaşlayabileceğini veya yükünün ne kadar ağır olduğunu göz ardı eder. Yazarlar bu kestirme yolun gerçek binalarda sorun yarattığını gösteriyor. Robotlar kavşaklara beklenenden daha erken veya geç varabilir, bu da tıkanma, kılpayı çarpışmalar veya taşıdıklarını sarsan ani frenleme olasılığını artırır.
Zamana gerçek dünyadan fizik eklemek
Araştırmacılar bu boşluğu fizik ile zamanlamayı harmanlayan iki aşamalı bir yaklaşımla ele alıyor. İlk olarak, AGV’ler için Dinamik Seyahat Süresi kestiricisi olan DTT-AGV’yi tasarlıyorlar. Bir koridoru tek parça bir zaman olarak ele almak yerine DTT-AGV her hareketi hızlanma, sabit hızla seyir ve yavaşlama gibi fazlara böler. Raf taşıyan bir AGV’nin basit bir mekanik modeli kullanılır; burada raf, yaylar ve sönümleyicilerle bağlanmış bir kütle gibi davranır. Bu model, ivmelenme ve yavaşlamanın yükte nasıl sallanma veya titreşim yaratabileceğini yakalar. Bundan, algoritma aracın belirli bir mesafe ve yük için hız, kuvvet veya titreşim sınırlarını aşmadan güvenle ne kadar hızlı gidebileceğini hesaplar ve yolun her segmenti için gerçekçi bir seyahat süresi döndürür.
Robotların burun buruna gelmesini önlemek
İkinci olarak, ekip ortak yollar üzerindeki çok sayıda robotu koordine eden Varış Zaman Zincirleme yöntemi ATC-AGV’yi tanıtıyor. DTT-AGV her segmentin ne kadar süreceğini tahmin ettikten sonra, ATC-AGV her robotun rotası boyunca her düğüm—kavşaklar, dönüşler veya aktarma noktaları—için kesin varış ve ayrılma zamanları atar. Her paylaşılan düğümde araçlar arasında güvenli bir boşluk sağlarken, yüklü olup olmadıkları, şarjda olup olmadıkları veya dönüyor olup olmadıkları gibi mevcut robot durumlarını hesaba katan bir zaman “zinciri” oluşturur. Yeni bir plan iki AGV’nin aynı düğümü zaman olarak çok yakın işgal etmesine neden olursa, ATC-AGV güvenlik marjını geri getirmek için bir robotun zaman çizelgesini gereken kadar kaydırır. Etkili biçimde, deponun zemin ızgarasını, çarpışmaları ortaya çıkmadan önce önlemeye yardımcı olan zaman farkındalıklı bir haritaya çevirir.
Daha düzgün hareketler ve daha nazik yolculukları test etmek
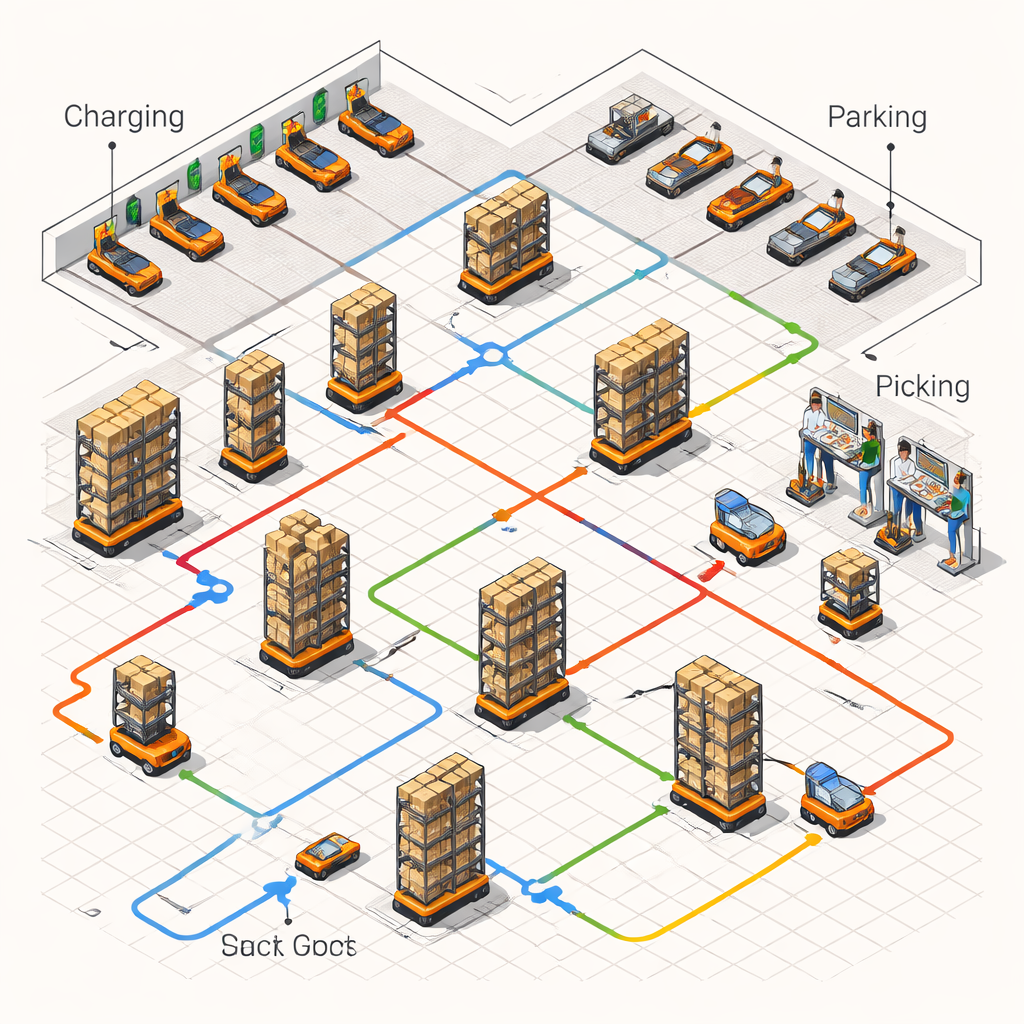
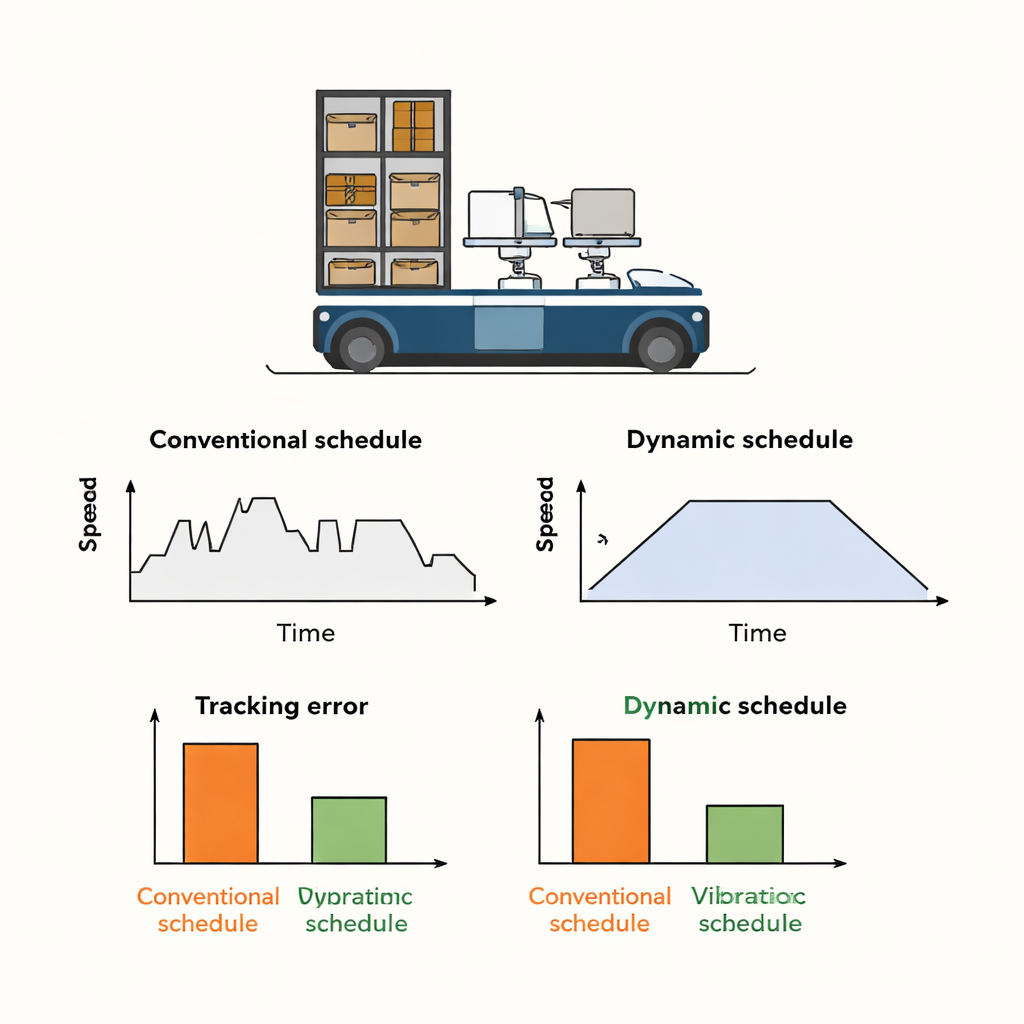
Fikirlerini test etmek için yazarlar, şarj alanları, park yerleri ve raf bölgeleri içeren ızgara tarzı bir cross-docking deposunda AGV’leri simüle ediyorlar. Planlayıcılarını neredeyse sabit hız varsayan ve ayrıntılı hareket fazlarını yok sayan geleneksel bir yöntemle karşılaştırıyorlar. Bir testte, bir robot L biçimli bir yol izliyor ve sonra 90 derece dönüyor. Geleneksel yaklaşım köşede hızda ani değişiklikler üretiyor; gerçek robot bunun tam olarak takip edemez. Sonuç, robotun olması gereken yer ile gerçekte bulunduğu yer arasındaki büyük takip hataları ve belirli noktalarda zamanlama hatası zirveleri oluyor. Yeni planlayıcıyla yol net hızlanma, seyir ve frenleme fazlarına ayrılıyor. Simüle edilen robot artık hedef yolunu yakından izliyor; hatalar çok daha küçük ve dönüşler daha yumuşak.
Paketlere daha nazik ve geleceğe hazır
İkinci test kümesi yükün kendisinin nasıl davrandığına odaklanıyor. Geleneksel zamanlama kullanıldığında, robot tabanı rafın yay benzeri davranışını harekete geçiren ani ivme sarsıntıları yaşıyor ve yükte güçlü titreşimler oluşuyor. Dinamik, yük farkındalıklı zamanlamayla ivmelenmeler daha dar bir bant içinde kalıyor ve daha yumuşak değişiyor. Zaman içinde ölçüldüğünde, hem yükün tepe hem de ortalama titreşimleri keskin bir şekilde düşüyor; bu, kırılgan, üst üste konmuş veya dengesiz öğeler için kritik önemde. Yazarlar ayrıca tekerlek-zemin sürtünmesi gibi göz ardı edilen faktörlerin tahminlerini nasıl etkileyebileceğini inceliyor ve tipik depo koşulları altında ek zamanlama hatasının algoritmalarına yerleştirdikleri güvenlik tamponları içinde kaldığını buluyorlar.
Gerçek depolar için bunun anlamı nedir
Basitçe söylemek gerekirse, bu çalışma AGV zamanlayıcılarına kontrol ettikleri makinelerin gerçek hareketlerine saygı duymayı öğretiyor. Seyahat sürelerini ve geçiş önceliği kararlarını robotların gerçekten ne kadar hızlı hızlanıp yavaşlayabileceği ve farklı yükleri sallamadan taşıyabileceği bilgisine dayandırarak, önerilen çerçeve yol takibini iyileştiriyor, kargo titreşimini azaltıyor ve kavşaklardaki çatışma riskini düşürüyor. Depo işletmecileri ve üreticiler için bu, daha düzgün trafik, malların daha güvenli elleçlenmesi ve filolar büyüdükçe ve düzenler daha karmaşık hale geldikçe ölçeklenebilecek bir temel anlamına geliyor.
Atıf: Nguyen, T.P., Nguyen, H., Phan, D.M. et al. Dynamic chain for scheduling of the multi-AGV systems with load-aware motion profiling. Sci Rep 16, 6832 (2026). https://doi.org/10.1038/s41598-026-37083-z
Anahtar kelimeler: otomatik yönlendirilen araçlar, depo robotikleri, çarpışmasız zamanlama, hareket planlama, akıllı lojistik