Clear Sky Science · tr
Düşük işlem gücüne sahip kenar SoC’larda nesne tespiti: tekrarlanabilir bir kıyaslama ve dağıtım yönergeleri
Akıllı kameralar için küçük çipler neden önemli
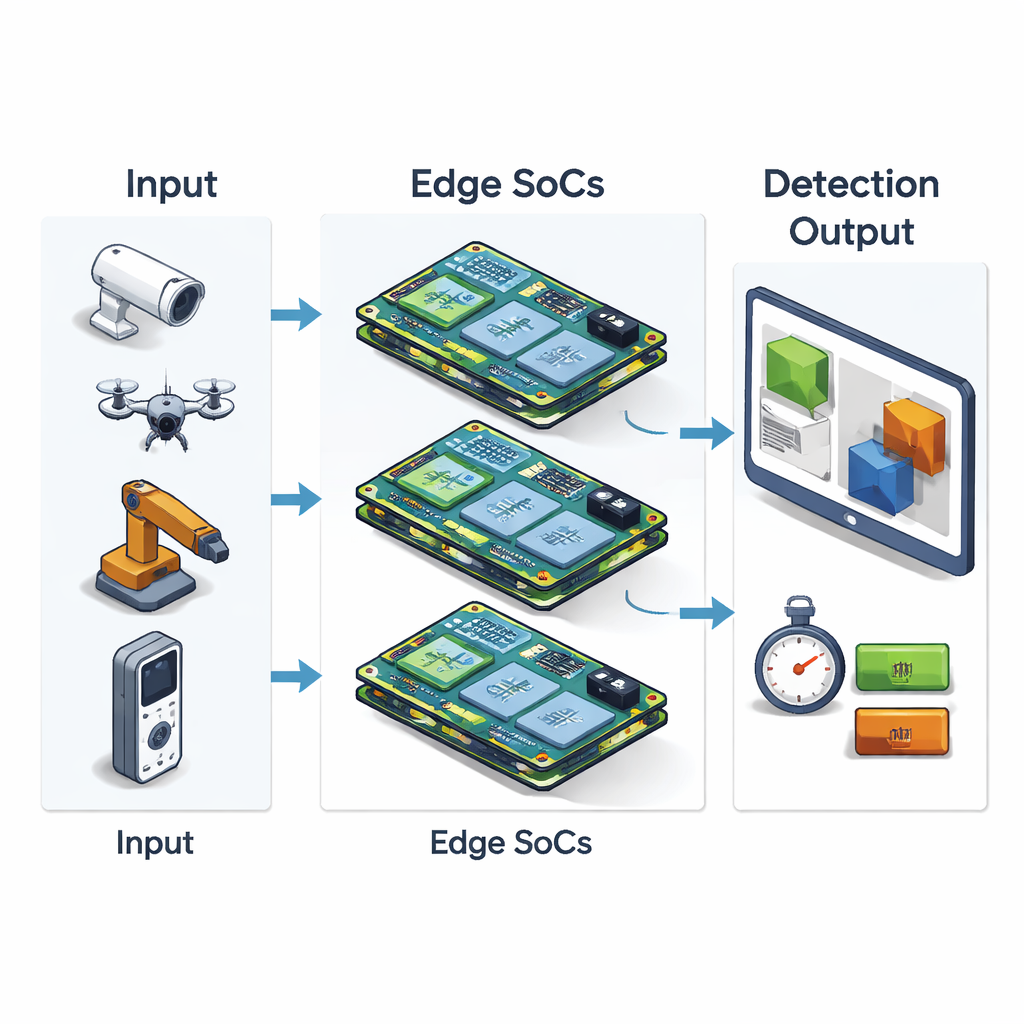
Çevremizdeki birçok “akıllı” cihaz—güvenlik kameraları, drone’lar, fabrika sensörleri ve kapı zilleri—insanları ve nesneleri gerçek zamanlı olarak tanımlamak zorunda, ancak bunun için veri merkezi düzeyinde enerji tüketen donanımlar yerine çok küçük, düşük güçlü çiplere dayanıyorlar. Şirketler genellikle popüler YOLO nesne tespiti modellerini tercih ediyor, ancak bu çiplerin reklam edilen hızları sahadaki gerçek performans hakkında çok az şey söylüyor. Bu makale, dokuz modern YOLO varyantının üç yaygın, düşük maliyetli Rockchip işlemci üzerinde deneysel bir incelemesini sunuyor; zorlu bir şekilde hız, enerji kullanımı ve güvenilirliği gerçek kenar koşullarında neyin belirlediğini ortaya koyuyor.
Gündelik üç çip mikroskop altında
Yazarlar, birçok gömülü görme sistemine sessizce güç veren üç ticari sistem üzerinde yoğunlaşıyor: küçük RV1106, orta sınıf RK3568 ve daha yetenekli RK3588. Her biri sıradan işlemci çekirdeklerini özel bir sinirsel işlem birimi (NPU) ve harici bellekle birleştirir. Bu platformlarda ekip, aynı kıyaslama veri setiyle eğitilmiş dokuz YOLO modelini—üç nesil (YOLOv5, YOLOv8, YOLO11) ve üç boyutta (Nano, Small, Medium)—dağıtıyor. Modelleri ortak bir formata dikkatle dönüştürüyor, 8-bit aritmetiğe niceliyor, Rockchip’in araçlarıyla derliyor ve gecikme, güç ve işlenen kare başına enerji ölçümlerini kararlı hale getirmek için yüzlerce zamanlanmış test çalıştırıyorlar.
Hız, özellik sayfasının ima ettiğinden farklı
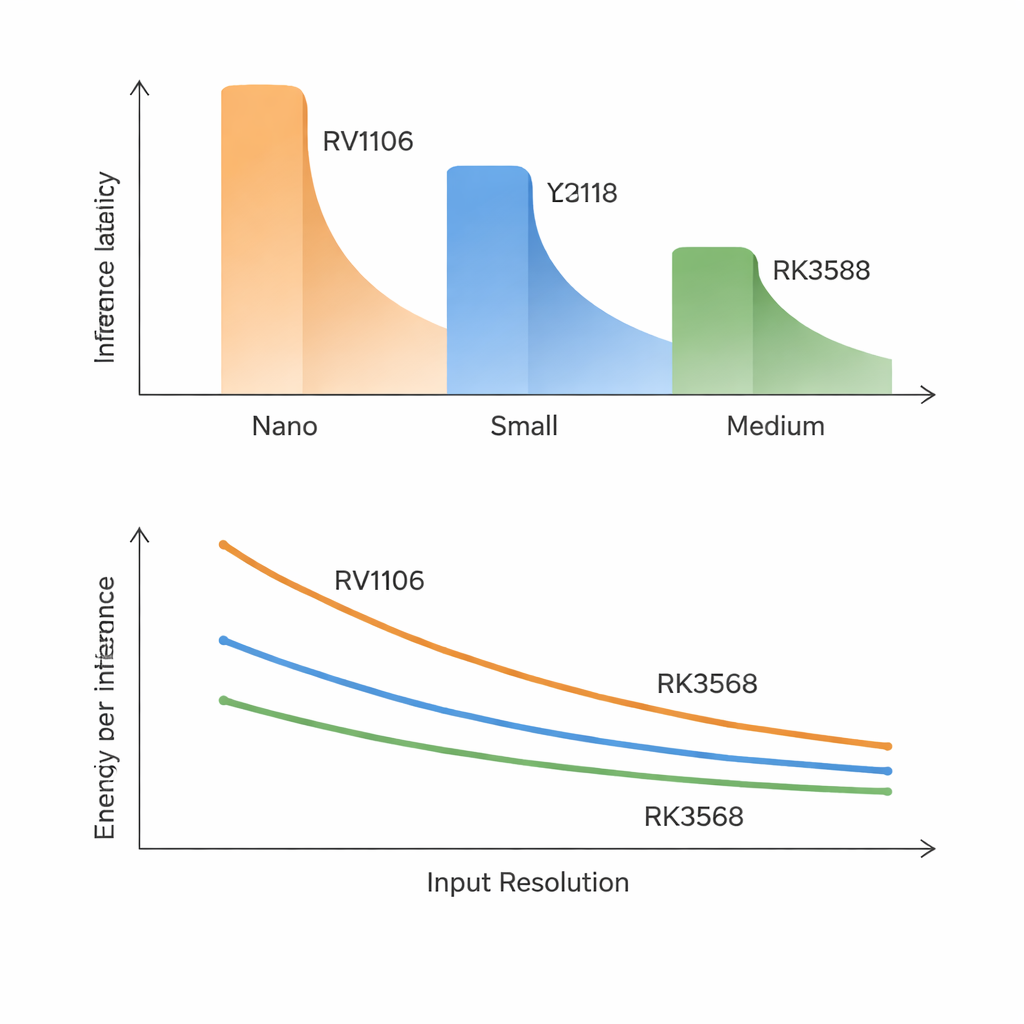
Açıkça görülen derslerden biri, geleneksel model ve çip rakamlarının gerçek hızı kötü öngördüğü. En yavaş çipte bile en küçük modeller kare başına yaklaşık 70–100 milisaniye alıyor ve orta boy modeller gerçek zamanlı kullanım için fazlasıyla yavaş kalıyor. En hızlı çip Nano ve birçok Small modeli 30 kare/saniye eşiğine yakın çalıştırabiliyor, ancak daha büyük modeller yine de çok yüksek kare hızı hedeflerinin gerisinde kalıyor. Sürpriz bir şekilde, gecikme, modelin doğruluğuyla hesaplama işlemi sayısı veya parametre sayısından daha yakın bir ilişki gösteriyor. Daha yeni, daha doğru YOLO tasarımları doğruluğa yardımcı olan fakat bu NPU’lar için yürütülmesi zor olan iç bloklar ekliyor; dolayısıyla “daha akıllı” genellikle bu donanımda “farkedilir şekilde daha yavaş” demek oluyor.
Daha büyük görüntüler ve paylaşılan bellek geri vurduğunda
Çalışma, giriş görüntülerini büyütmenin işi sadece düzgün bir şekilde artırmadığını gösteriyor. Teoride genişlik ve yüksekliği iki katına çıkarmak maliyeti dört katına çıkarır, ancak düşük bant genişliğine sahip çiplerde bu daha hızlı artabilir. Görüntüler büyüdükçe ara veriler rahatça sığmaz hale geliyor ve tekrar tekrar çip dışı belleğe taşınmak zorunda kalıyor. En küçük ve orta sınıf SoC’larda bu bir trafik sıkışıklığına dönüşüyor: orta boy modeller beklenenden çok daha fazla yavaşlıyor ve diğer görevlerin yoğun arka plan bellek kullanımı gecikmeleri %50–270 oranında artırabiliyor. Buna karşın çok daha yüksek bellek bant genişliğine sahip RK3588, çözünürlük artışlarını zarifçe yönetiyor ve ek CPU veya bellek yükü altında neredeyse etkilenmiyor; bu da ham hesaplama değil bellek hızı’nın genellikle gerçek darboğaz olduğunu vurguluyor.
Daha fazla çekirdek ve daha fazla güç verimliliği garanti etmez
Rockchip’in en hızlı çipi üç çekirdekli bir NPU içeriyor, ancak YOLO’yu birden çok çekirdeğe yaymak yalnızca sınırlı fayda sağlıyor. Çoğu model için işi iki veya üç çekirdeğe bölmek gecikmeyi %10’dan daha az kısaltıyor ve bazen performans daha da kötüleşiyor. Çekirdekleri koordine etme ve aynı bellek havuzunu paylaşma üstündeki ek yük teorik kazancın büyük kısmını yok ediyor. Güç ölçümleri durumu bir başka açıdan değiştiriyor: üç SoC da çalışırken sadece birkaç watt çekiyor, ancak işlenen kare başına enerji üç kata kadar farklılık gösterebiliyor. Üst düzey RK3588 anlık olarak daha fazla güç kullanıyor ama işi o kadar hızlı bitiriyor ki, özellikle orta boy modeller ve daha yüksek çözünürlüklerde çoğunlukla en enerji verimli seçenek haline geliyor.
Gerçek dünyaya yönelik pratik çıkarımlar
Akıllı kameralar, robotlar veya IoT cihazlarını düşünen okuyucular için mesaj net. En küçük çiplerde yalnızca en minik YOLO modelleri orta düzey görüntü boyutlarında pratik ve gerçek zamanlı video yine de zor. Orta sınıf çipler küçük modelleri rahatça destekleyebilir ve kare hızı ya da pil ömrü esnetilebilirse ara sıra orta boy modelleri de çalıştırabilir. Üst düzey RK3588 ise daha doğru, orta boy YOLO varyantlarını çalıştırmayı gerçekçi hale getiriyor ve yine de kare başına enerjiyi kontrol altında tutuyor. Genel olarak makale, tasarımcıların donanımı akılda tutarak modelleri seçmeleri, bellek bant genişliğine dikkat etmeleri ve her zaman daha büyük ağların peşinden gitmek yerine bellek tasarrufu sağlayan yöntemleri tercih etmeleri gerektiğini savunuyor. Sonuçta önemli olan ilan edilen tera-işlem/saniye değeri değil; tüm sistemin gerçek dünyanın dağınık koşullarında hızlı, kararlı ve enerji bilincine sahip nesne tespiti sunup sunamayacağıdır.
Atıf: Kong, C., Li, F., Yan, X. et al. Object detection on low-compute edge SoCs: a reproducible benchmark and deployment guidelines. Sci Rep 16, 5875 (2026). https://doi.org/10.1038/s41598-026-36862-y
Anahtar kelimeler: kenar AI, nesne tespiti, gömülü görme, YOLO modelleri, düşük güçlü SoC