Clear Sky Science · tr
Dört pervaneli drone’un belirsizlikler varken uyarlamalı ikinci dereceden sürekli kontrol ile duvara tutunması
Neden dronların duvarlara tutunması önemli?
Küçük bir dronun yalnızca pil bitene kadar havada asılı kalmakla kalmayıp, bir kuş gibi sessizce duvara konup köprü, tarım arazisi veya orman kenarını saatlerce izleyebildiğini hayal edin. Bu makale, böyle "tutunan" dronları dikey bir yüzeye uçarak temas kurup sıçramadan ve kararlı şekilde yapışarak, hava türbülansı veya dronun davranışının tam olarak bilinmemesi gibi belirsizlikler varken bile sabit kalmasını sağlayan yeni bir kontrol yöntemini sunuyor. Çalışma, kırılgan bir uçan aracı güvenilir, enerji tasarruflu bir inceleme aracına dönüştürme zorluklarını ele alıyor.
Havada asılı robotlardan duvara yapışan keşifçilere
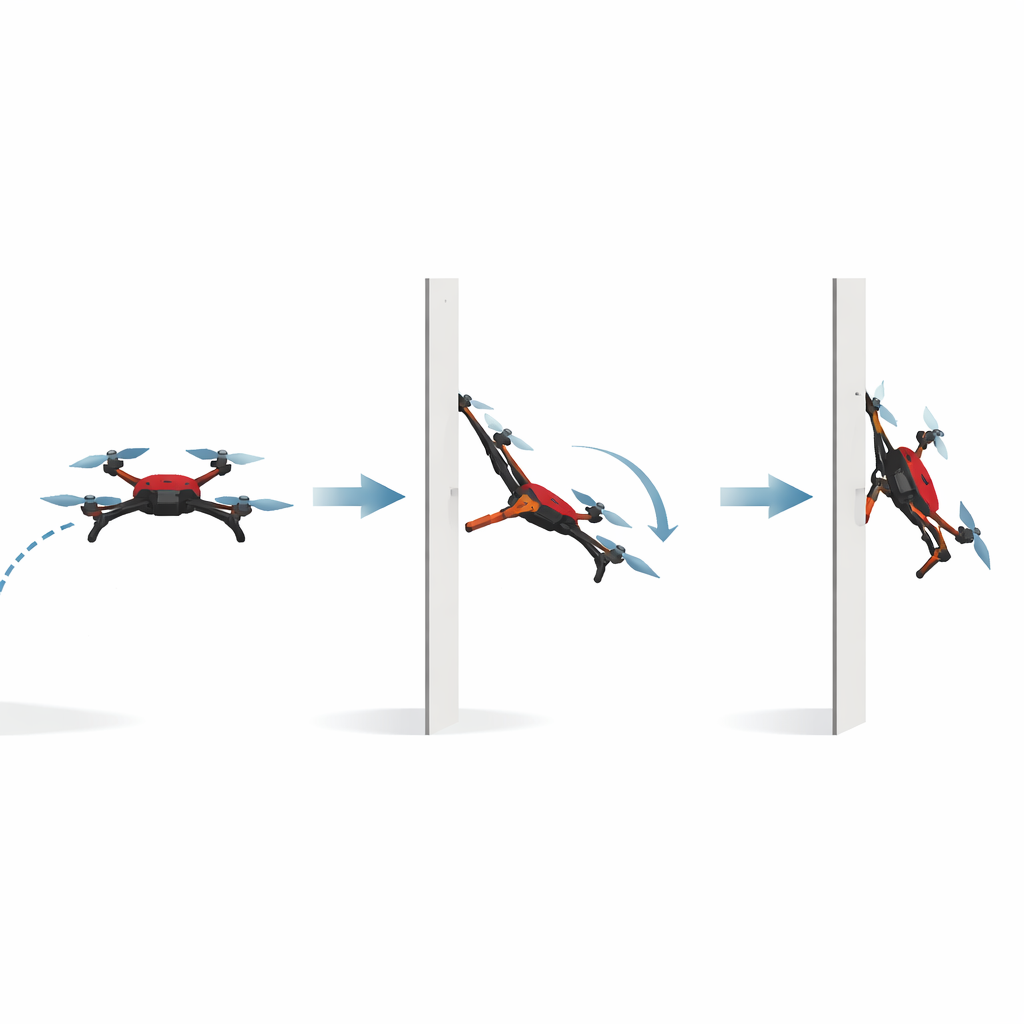
Küçük dört pervaneli dronlar yani quadrotorlar; haritalama, inşaat denetimi, vahşi yaşam izleme ve hassas tarım gibi işler için zaten kullanılıyor. Yine de en büyük sınırlamaları dayanıklılık: havada asılı kalmak pil tüketir. Bir yüzeye—duvar, direk veya köprünün altı gibi—tutunmak, dronun sensörlerini uzun süre yerinde tutarken çoğu motoru kapatmasına olanak tanır. Bunu güvenli şekilde yapmak ise hiç de basit değil. Kısa ama kritik tutunma manevrası sırasında dron duvara yaklaşmalı, temas etmeli ve sekmeden, kaymadan veya kontrolü kaybetmeden burun aşağı pozisyona dönmelidir; beklenmedik rüzgârlar veya modelleme hataları hareketini bozabilir.
Temiz bir duvar inişinin zorluğu
Yazarlar, önünde hafif bir destek kolu bulunan ve duvarla fiziksel temas noktası olarak görev yapan bir quadrotoru inceliyor. Dron serbest uçuştan temasa geçerken konumu (yatay, ileri-geri, yukarı-aşağı) ve duruşu (roll, pitch, yaw açıları) sıkı şekilde bağlıdır: yön değişikliği itme kuvvetinin harekete dönüşümünü değiştirir ve duvardan gelen ani reaksiyon kuvveti gövdeyi döndürebilir. Buna ek olarak, duvarın yakınındaki aerodinamik etkileşimler, küçük imalat hataları ve sensör gürültüsü gibi gerçek dünya etkileri bilinmeyen bozucu etkenler olarak ortaya çıkar. Mevcut sağlam kontrol teknikleri dronları kararlı tutabilir, fakat genellikle motor komutlarında yüksek frekanslı “titreşim” (chattering) oluşturur, donanımı yıpratır ve hataların öngörülebilir kısa bir zaman diliminde sıfıra inmesini garanti etmek yerine yavaşça küçülmesini sağlar.
Denge ve uyum için daha akıllı bir yol
Bu sorunların üstesinden gelmek için makale, uyarlamalı ikinci dereceden sürekli kontrol (ASOCC) şemasını tanıtıyor. Basitçe söylemek gerekirse, denetleyici yalnızca dronun hareketinin hedeften ne kadar saptığına bakmakla kalmaz, aynı zamanda bu hatanın ne kadar hızlı değiştiğini de izler ve her ikisinin de sonlu bir sürede sıfırlanmasını sağlayacak şekilde komutlarını şekillendirir. Dahili bir bozulma gözlemcisi gerçek zamanlı bir “gürültü dinleyicisi” gibi davranarak bilinmeyen kuvvetlerin ve model uyumsuzluklarının net etkisini tahmin eder ve bu bilgiyi kontrol yasasına geri besler. Kritik olarak, denetleyicinin ne kadar güçlü tepki vereceğini belirleyen kazançlar önceden sabitlenmiş olmaktan ziyade bu tahminlere dayanarak anında ayarlanır. Kontrol sinyalleri ani olarak değişmek yerine pürüzsüzce değiştiği için tasarım, titreşimi büyük ölçüde azaltırken sağlamlığı korur.
Yeni kontrol yöntemini teste koymak
Araştırmacılar önce gözlemci-denetleyici çiftinin matematiğini analiz ediyor ve enerji benzeri Lyapunov fonksiyonları kullanarak, sınırlı bozulmalara rağmen tüm hareket hatalarının sonlu bir süre içinde sıfıra yakınsadığını kanıtlıyorlar. Ardından yazılımda agresif tutunma senaryolarını simüle ederek dron modelini rüzgâr benzeri kuvvetlere, rastgele ölçüm gürültüsüne ve kasıtlı fiziksel parametre hatalarına maruz bırakıyorlar. Bu denemelerde ASOCC, dronu aşama, yaklaşma ve tutunma olmak üzere üç aşamalı süreçten geçirirken konum ve yön hatalarını küçük, kontrol girdilerini ise pürüzsüz tutmayı başardı. Popüler kayma modlu (sliding-mode) ve model tabanlı denetleyiciler dahil olmak üzere birkaç gelişmiş yöntemle karşılaştırıldığında, yeni yöntem temel izleme hata ölçülerini yaklaşık %35–55 oranında azalttı.
Simülasyondan gerçek duvarda bir drona
Simülasyonların ötesine geçerek ekip, ticari bir uçuş kartı ve ön kolu olan 3D yazdırılmış bir iskelet kullanarak minyatür bir tutunan quadrotor inşa etti. Kapalı alan deneylerinde dron, eğimli bir duvara otonom olarak uçtu, yaklaşık bir metre yüksekliğe çıktı, ardından burun aşağı dönerek temas kurdu ve yapışık kaldı. Zaman serisi verileri, irtifa, yatay konum ve pitch açısının istenen yolları yakından takip ettiğini, yalnızca sensör gürültüsünden kaynaklanan küçük dalgalanmalar olduğunu gösteriyor. Düşük maliyetli donanım, iletişim gecikmeleri ve aktüatör sınırlarına rağmen dron darbeden sonra sekmedi veya salınım yapmadı; bu da ASOCC’un uçuşun düzensiz gerçekleriyle başa çıkabildiğini gösteriyor.
Geleceğin uçan denetçileri için ne anlama geliyor
Uzman olmayanlar için temel sonuç açık: bu çalışma, küçük dronların dikey yüzeylere güvenilir şekilde yapışmasını ve şartlar kusurlu olsa bile orada kalmasını sağlayan bir kontrol stratejisi sunuyor. Pürüzsüz ama güçlü düzeltici kontrolu uyarlamalı bir bozulma gözlemcisiyle birleştirerek yöntem, birçok sağlam denetleyicide görülen titreşim ve donanım stresini azaltırken hızlı, hassas tutunma sağlıyor. Bu, daha hafif piller, daha basit platformlar ve daha yüksek güvenlikle uzun süreli hava gözetimine olanak tanıyor—altyapıyı, tarımı ve doğal ortamları sessizce gözetleyen otonom “duvara yapışan” robot filolarına doğru önemli bir adım.
Atıf: Gupta, S., Nandanwar, A., Dhar, N.K. et al. Perching of quadrotor using adaptive second-order continuous control in the presence of uncertainties. Sci Rep 16, 8578 (2026). https://doi.org/10.1038/s41598-026-36857-9
Anahtar kelimeler: dört pervaneli drone tutunma, uyarlamalı kontrol, insansız hava aracı incelemesi, bozulma gözlemcisi, hava robotikleri