Clear Sky Science · tr
Robotik hasatta kırmızı biber demetlerinin doğru tespiti için hafif YOLO tabanlı bir model
Baharatlı Hasatlar İçin Daha Akıllı Robotlar
Sichuan biberi, Sichuan mutfağına karakteristik karıncalanma hissini veren küçük kırmızı kabuklar, toplaması beklenmedik şekilde zordur. Meyveler yoğun, dikenli demetler halinde büyür ve kolayca zarar görebilir; elde hasat etmek ise yavaş ve mevsimlik bir iştir. Bu çalışma, gerçek bahçelerde —meyveler örtüştüğünde veya yaprakların arkasına saklandığında bile— küçük, mobil robotların bu hassas biber demetlerini hızlı ve doğru şekilde bulmasına yardımcı olmak üzere Red-YOLO adında yeni bir bilgisayarlı görü sistemi tanıtıyor.
Biber Toplamayı Bu Kadar Zorlaştıran Nedir?
Elma gibi büyük, pürüzsüz meyvelerin aksine kırmızı biber taneleri dikenli dallar üzerinde birbirine sıkıca dizilmiş çok sayıda küçük meyve şeklindedir. Demetler ağaçtan ağaca çok farklı görünebilir: bazıları sıkı ve kompakt, bazıları gevşek ve dağılıktır; hepsi dallar, yapraklar ve değişen ışıkla karışık bir arka plan tarafından çevrelenir. Bir robot için bir demetin nerede bittiğini ve diğerinin nerede başladığını —ve her birinin ne kadar sıkı olduğunu— görmek hayati önemdedir. Kavrama kuvveti ve hatta robotun toplama aletinin boyutu, meyvelerin sıkılığına göre değişmelidir; aksi halde biberlerin hassas yağ kesecikleri patlayarak kaliteyi ve değeri düşürebilir.
Gerçek Dünya Görüntü Kütüphanesi Oluşturmak
Bu ürün için halka açık görüntü koleksiyonları bulunmadığı için araştırmacılar önce kendi veri setlerini oluşturmak zorunda kaldılar. Sichuan’ın Hanyuan İlçesi’nde iki yetiştirme sezonu boyunca gerçek bahçelerde akıllı telefon kullanarak biber ağaçlarının fotoğraflarını çektiler; farklı güneş açıları ve gün içi zamanlarında 960 yüksek çözünürlüklü, kare görüntü elde ettiler. Her görüntü elle dikkatle etiketlendi; kompakt ve dağınık demetler ayrıldı. Bilgisayarın çeşitliliği öğrenmesi için birçok görüntü dijital olarak değiştirildi — parlaklık ve kontrast ayarlandı, yatay olarak çevrildi, bazı ızgaralar distorsiyona uğratıldı ve görüntüler döndürüldü. Bu, eğitim setini 4.300’ün üzerine genişletti; nihai sistemin performansını dürüstçe test etmek için küçük bir dokunulmamış fotoğraf grubu ise saklandı.
Daha İnce, Daha Keskin Bir Bilgisayarlı Görü Modeli
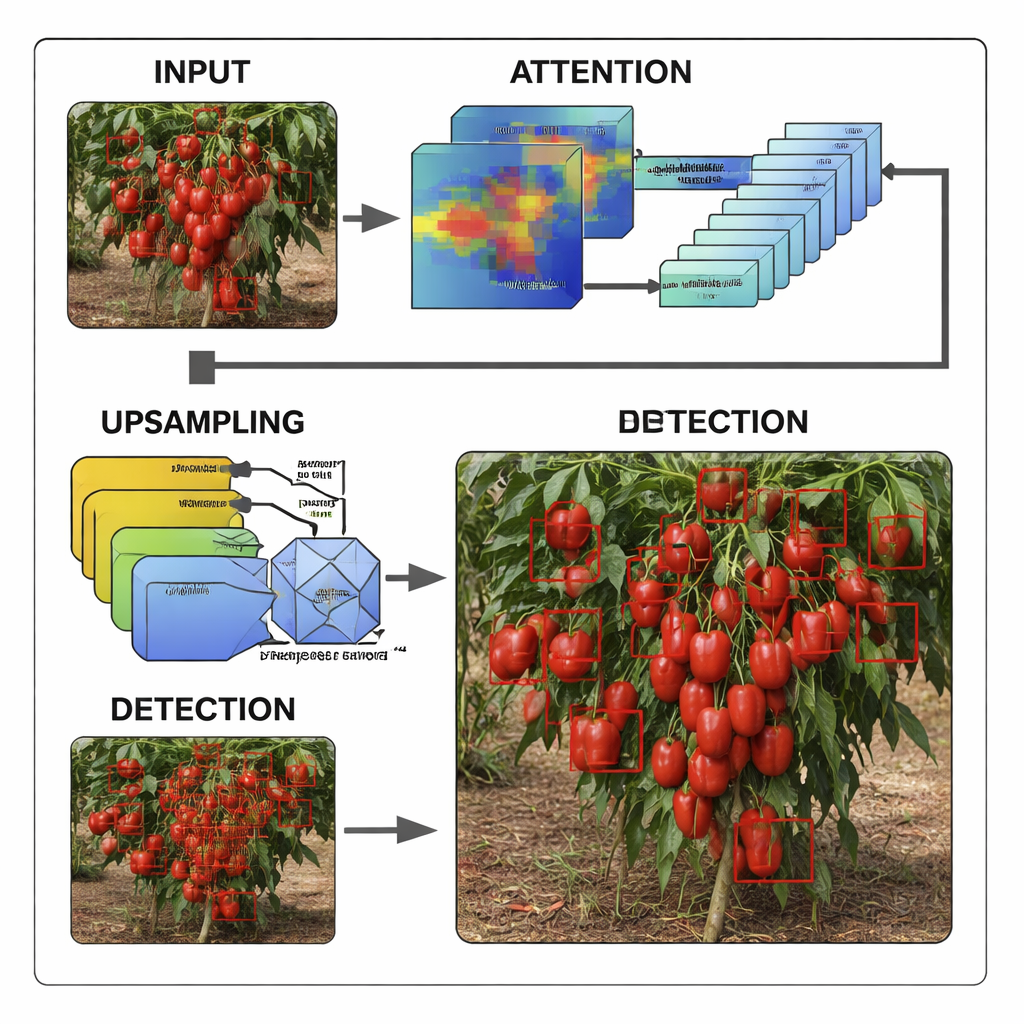
Sistemin merkezinde, nesneleri birden çok yavaş aşama yerine tek, hızlı bir geçişte bulan yaygın bir “you only look once” (sadece bir kez bakarsın) nesne tespit modeli olan YOLOv8 bulunuyor. Ekip bu modelin çok küçük bir versiyonunu özelleştirdi ve ardından bunu özel olarak kırmızı biber demetleri için yeniden biçimlendirdi. Ağa, meyve içermesi en muhtemel kanal ve bölgelere odaklanmayı; gökyüzü, dallar ve uzak ağaçlar gibi dikkat dağıtıcı unsurları görmezden gelmeyi öğreten bir dikkat (attention) modülü eklediler. Ağın bazı bölümlerini, bilgiyi daha verimli yeniden kullanacak ve gereksiz hesaplamaları azaltacak şekilde yeniden tasarladılar. Ayrıca basit bir yeniden boyutlandırma adımını, örtüşen biberlerin etrafındaki ince detayları ve sınırları yeniden inşa eden daha akıllı bir upsampling bloğuyla değiştirdiler; bu, modelin kalabalık demetlerin nerede başladığını ve bittiğini ayırt etmesine yardımcı oluyor.
Küçük Robotlar İçin Hızlı, Doğru Görü
Bu değişikliklerin değerli olup olmadığını görmek için araştırmacılar Red-YOLO’yu hem daha eski, daha ağır tespit sistemleriyle hem de çeşitli modern hafif YOLO varyantlarıyla karşılaştırdı. Geleneksel çok aşamalı modeller güçlü olmalarına karşın kompakt bahçe robotları için basitçe çok yavaş ve kaynak tüketimleri fazlaydı. Birkaç yeni YOLO sürümü daha iyi performans gösterse de küçük, kısmen gizlenmiş demetler veya karmaşık arka planlarla baş etmekte zorlandı; sıklıkla meyveleri kaçırdılar veya yaprakları biber zannettiler. Red-YOLO daha iyi bir denge yakaladı: karşılaştırma modellerinin hepsinden daha yüksek genel doğruluk ve geri çağırma (recall) ile biber demetlerini tespit etti; aynı zamanda model boyutunu üç milyon parametrenin altında tutarak gömülü işlemciler için hesap yükünü düşük tuttu. Çeşitli bahçe sahalarında yapılan testler, Red-YOLO’nun meyveler küçük, gölgede veya yoğun şekilde örtüşmüş olsa bile tutarlı şekilde demetleri bulduğunu gösterdi.
Laboratuvar Modelinden Bahçe Yardımcısına
Uzman olmayanlar için önemli sonuç pratiktir: bu çalışma, kompakt, dikkatle ayarlanmış bir görme sisteminin küçük hasat robotlarına sahada güvenilir bir “göz” sağlayabileceğini gösteriyor. Red-YOLO ile bir robot, kompakt mı yoksa dağınık bir demetle mi uğraştığını otomatik olarak seçebilir ve toplamadan önce kavrayıcı boyutunu ve kuvvetini ayarlayarak hasarı azaltıp işçilikten tasarruf edebilir. Mevcut çalışma tek bir bölgede tek bir biber çeşidine odaklansa da aynı yaklaşım —odaklanmış veri setleri oluşturmak ve ince tespit modellerini rafine etmek— diğer özel ürünlere de genişletilebilir. Bu görü sistemleri daha sağlam hale gelip yaygınlaştıkça, hasadı daha hızlı, daha güvenli ve daha tutarlı hale getirerek dünyanın en sevilen bazı tatlarını besleyen biberlerin düzenli bir arzını sağlamaya yardımcı olabilirler.
Atıf: Zhao, H., He, J., Li, Y. et al. A lightweight YOLO-based model for accurate detection of red pepper clusters in robotic harvesting. Sci Rep 16, 5879 (2026). https://doi.org/10.1038/s41598-026-36671-3
Anahtar kelimeler: robotik hasat, biber tespiti, bilgisayarlı görü, hafif YOLO, akıllı tarım