Deniz tabanında, otonom su altı araçları iklim araştırmaları, altyapı denetimi ve arama-kurtarma için göz ve kulak işlevi görür. Ancak bu robot denizaltılar, sinyallerin yavaş, gürültülü ve enerji kısıtlı olduğu zorlu bir ortamda net şekilde iletişim kurma ve düşünme konusunda temel bir sorunla karşılaşıyor. Bu makale, artırılmış ve sanal gerçekliği takviye öğrenme adı verilen bir yapay zeka dalıyla birleştirerek su altı robotlarının iletişim kurmasına, nesne tespit etmesine ve güvenli kalmasına yardımcı olacak yeni bir yaklaşım sunuyor.
Su altı iletişimi neden bu kadar zor
Veri göndermek su altında havadan çok daha zordur. Wi‑Fi ve 5G gibi radyo dalgaları deniz suyu tarafından hızla soğurulur. Akustik (ses tabanlı) sinyaller daha uzaklara ulaşsa da çok düşük veri hızları sunar ve gecikme, yankılanma veya bozulma yaşayabilir. Manyetik endüksiyon yalnızca onlarca metreyle sınırlıdır. Mevcut su altı robot kontrol sistemleri genellikle bu kanalları ayrı ayrı ele alır ve gezinme ile algılama için sabit kurallar kullanır. Bu durum koşullar değiştiğinde uyum sağlamayı zorlaştırır, pil enerjisini israf eder ve iletişim bağlantılarını dinlemeye veya saldırıya açık bırakır.
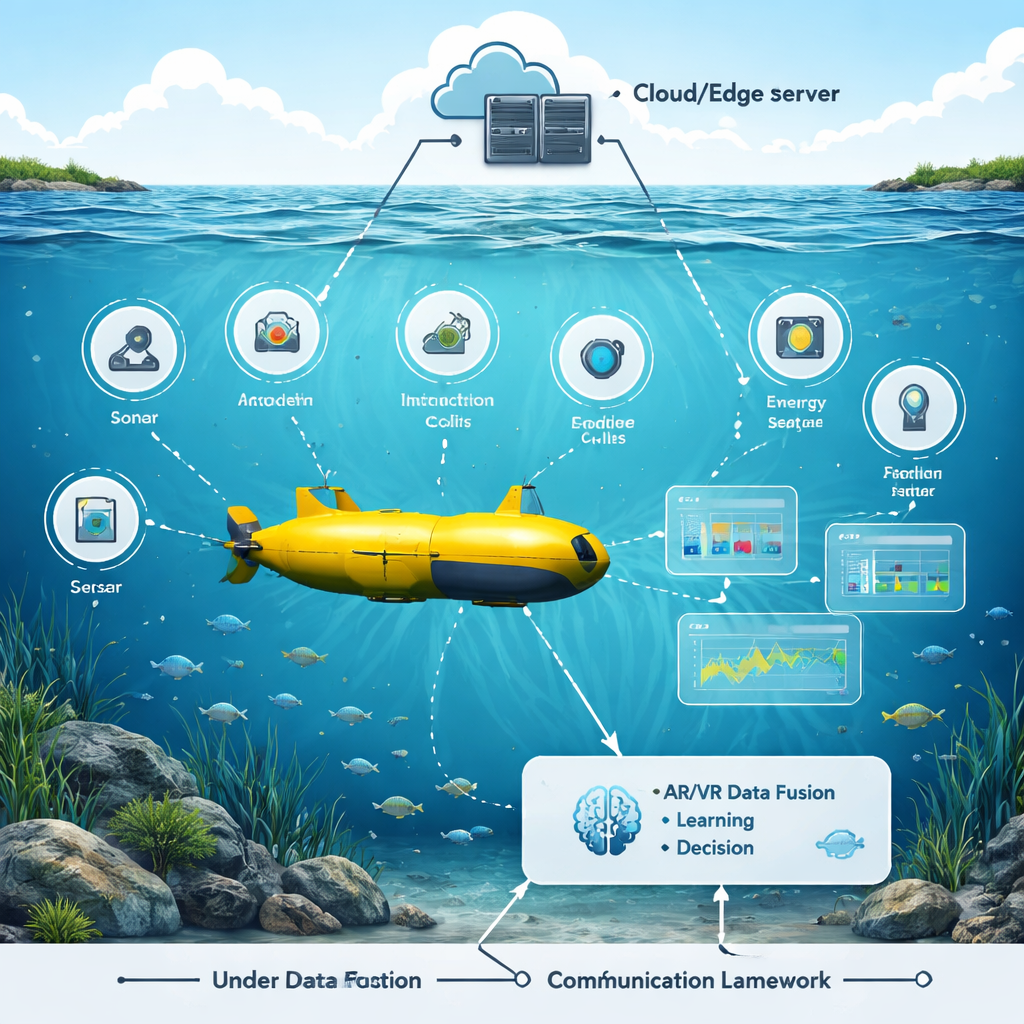
Daha iyi içgüdüler eğitmek için sanal bir okyanus Figure 1.
Yazarlar, hareketli balıklar, kayalar, tekneler ve şamandıralar ile sudaki gerçekçi gürültü ve sinyal kaybını yeniden yaratan artırılmış ve sanal gerçeklik tabanlı bir test altyapısı kurdular. Simüle edilmiş bir su altı aracı, sonar, kameralar, akustik modemler, enerji ölçerler ve konum izleyiciler dahil birçok sensör kullanarak bu ortamda geziyor. Sanal sahnede araştırmacılar, nesne konumlarını, su koşullarını ve sensör ayarlarını kaydırarak değiştirebiliyor ve robotun nasıl tepki verdiğini anında görebiliyor. Bu AR/VR katmanı sadece görsel bir öğe değil; ham sensör verilerini yapay zekâ sisteminin anlaması ve ona göre hareket etmesi daha kolay olan birleşik bir 3B görüntüde birleştiriyor.
Robotu deneyimden öğrenmeye öğretmek
Çerçevenin merkezinde, yazarların Uyarlanabilir Artırılmış Gerçeklik ve Takviye Öğrenme Zamanlama Stratejisi (AARLSS) adını verdikleri bir yapay zekâ stratejisi var. Sabit bir senaryo izlemek yerine robot, sanal okyanusta deneme-yanılma yoluyla öğreniyor. Her an, birleşik sensör durumunu gözlemler, bir eylem seçer (rotayı değiştirmek, sensör örnekleme hızını ayarlamak veya kısa ve uzun menzilli iletişim arasında geçiş yapmak gibi) ve bir ödül alır. Bu ödül dört hedefi dengeler: enerji tasarrufu, gecikmenin azaltılması, güvenlik riskinin düşürülmesi ve daha az hesaplama ile ağ kaynağı kullanımı. Derin Q‑öğrenme ağı, farklı kararların beklenen değerini saklar ve günceller; robotun hem son zamanlardaki hem de daha eski durumlardan öğrenebilmesi için geçmiş deneyimlerin mini partiler halinde tutulduğu bir tekrar belleği kullanır.
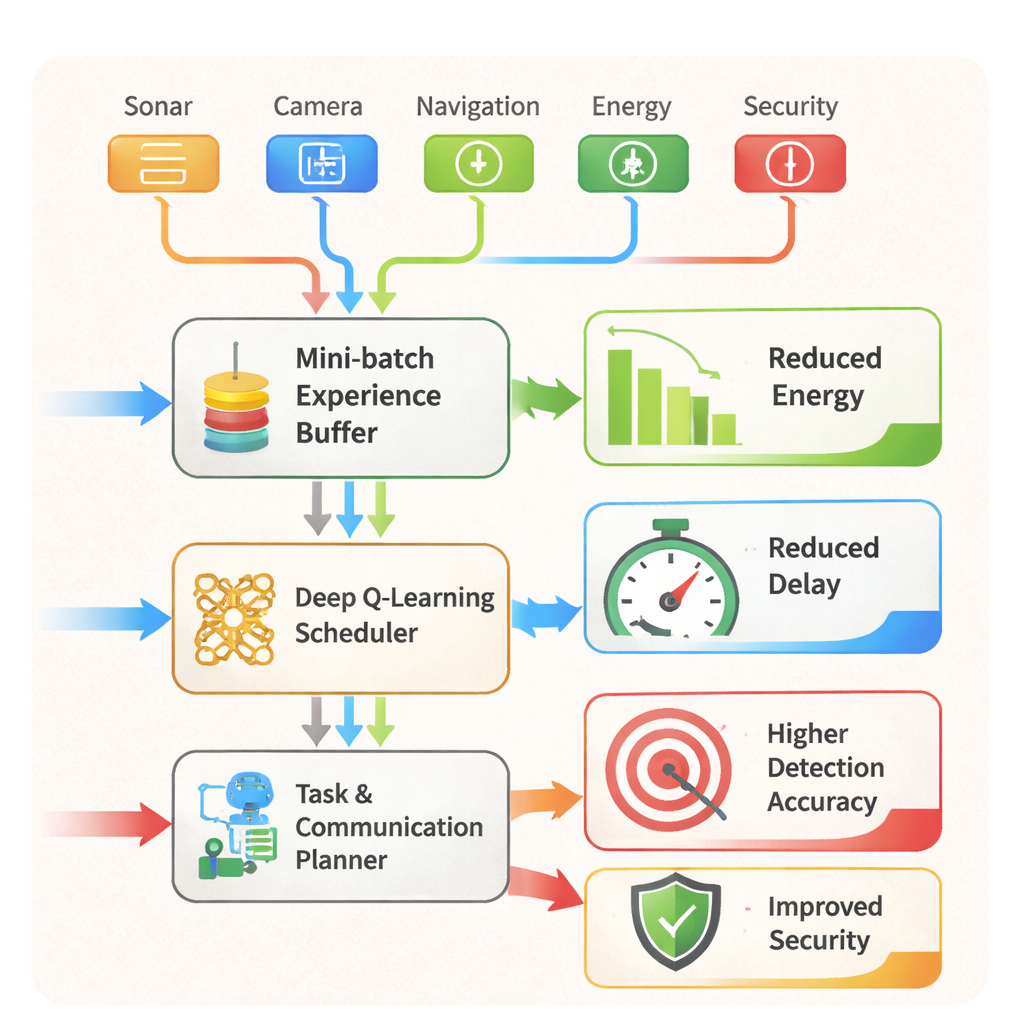
Akıllı zamanlamadan daha güvenli görevlere Figure 2.
AARLSS aynı zamanda gerçek zamanlı bir zamanlayıcı görevi de görür. Hangi görevlerin—navigasyon, nesne tespiti, iletişim veya güvenlik kontrolleri—nerede ve ne zaman çalıştırılması gerektiğine, verinin robot üzerinde mi işleneceğine, kenar sunucuya mı aktarılacağına veya geciktirilip geciktirilmeyeceğine karar verir. Bunun üzerinde yerleşik bir saldırı tespit sistemi, sensör ve ağ verilerindeki desenleri sürekli tarayarak bir saldırı veya arıza belirtisi olabilecek anomalileri işaretler ve riskli bağlantıları engelleme veya yalnızca yerel hesaplamayı zorunlu kılma gibi koruyucu eylemleri tetikleyebilir. AR/VR simülatörü içindeki testlerde, çerçeve birçok yerleşik takviye öğrenme yöntemini geride bıraktı. Su altı aracının enerji kullanımını yaklaşık %20 azalttı, iletişim ve görev gecikmelerini yaklaşık %18–20 düşürdü ve karmaşık manevralar ile yoğun sahnelerde bile nesne tespit doğruluğunu yaklaşık %97–98 seviyelerine çıkardı.
Gerçek dünyadaki okyanuslar için anlamı
Uzman olmayanlar için ana mesaj şudur: Bu araştırma, daha bağımsız, verimli ve güvenilir su altı robotlarına işaret ediyor. Zengin bir sanal okyanusta eğitim alıp enerji, zaman, doğruluk ve güvenliği aynı anda dengelemeyi öğrenerek AARLSS, bir aracın ne zaman konuşacağını, ne zaman dinleyeceğini ve enerji tasarrufu için ne zaman sessiz kalacağını seçmesine olanak tanır—tüm bunlar çevresine dikkatle bakarken ve verilerini korurken gerçekleşir. Bu sonuçlar açık deniz yerine gelişmiş bir simülasyon ortamından gelmesine rağmen, gelecekteki su altı robot filosunun insan gözetimini azaltarak daha uzun, daha güvenli ve daha veri zengini görevleri yönetebileceğini; deniz bilimi ve açık deniz endüstrisi denetimleri de dahil olmak üzere pek çok alanda iyileşme sağlayabileceğini öne sürüyor.
Atıf: Lakhan, A., Mohammed, M.A., Ghani, M.K.A. et al. A novel augmented reality and reinforcement learning empowered communication framework for underwater unmanned autonomous vehicle.
Sci Rep16, 6241 (2026). https://doi.org/10.1038/s41598-026-36647-3
Anahtar kelimeler: su altı robotik, otonom su altı araçları, takviye öğrenme, artırılmış gerçeklik, su altı iletişimi