Clear Sky Science · tr
Dinamik ortamlarda aktif semantik görsel SLAM için karşılıklı bilgi temelli hiyerarşik NBV kararı
İleriyi Düşünebilen Robotlar
Robotlar fabrikalardan çıkarak evlere, hastanelere ve ofislere girdikçe, insanlarla ve diğer hareketli nesnelerle dolu alanlarda gezinmek zorunda kalıyorlar. Bu makale, bir robotun nerelere bakacağını ve nasıl hareket edeceğini “önceden düşünmesine” olanak tanıyan yeni bir yaklaşım sunuyor; böylece çevresinin güvenilir bir haritasını oluşturabiliyor—çevre hareketsiz olmadığında bile. Bu çalışma, daha güvenli hizmet robotları, daha akıllı teslimat robotları veya insanlarla aynı alanı paylaşmak zorunda olan geleceğin ev asistanlarıyla ilgilenen herkes için önemli.
Hareket Eden İnsanlar Neden Robotları Kafa Karıştırır
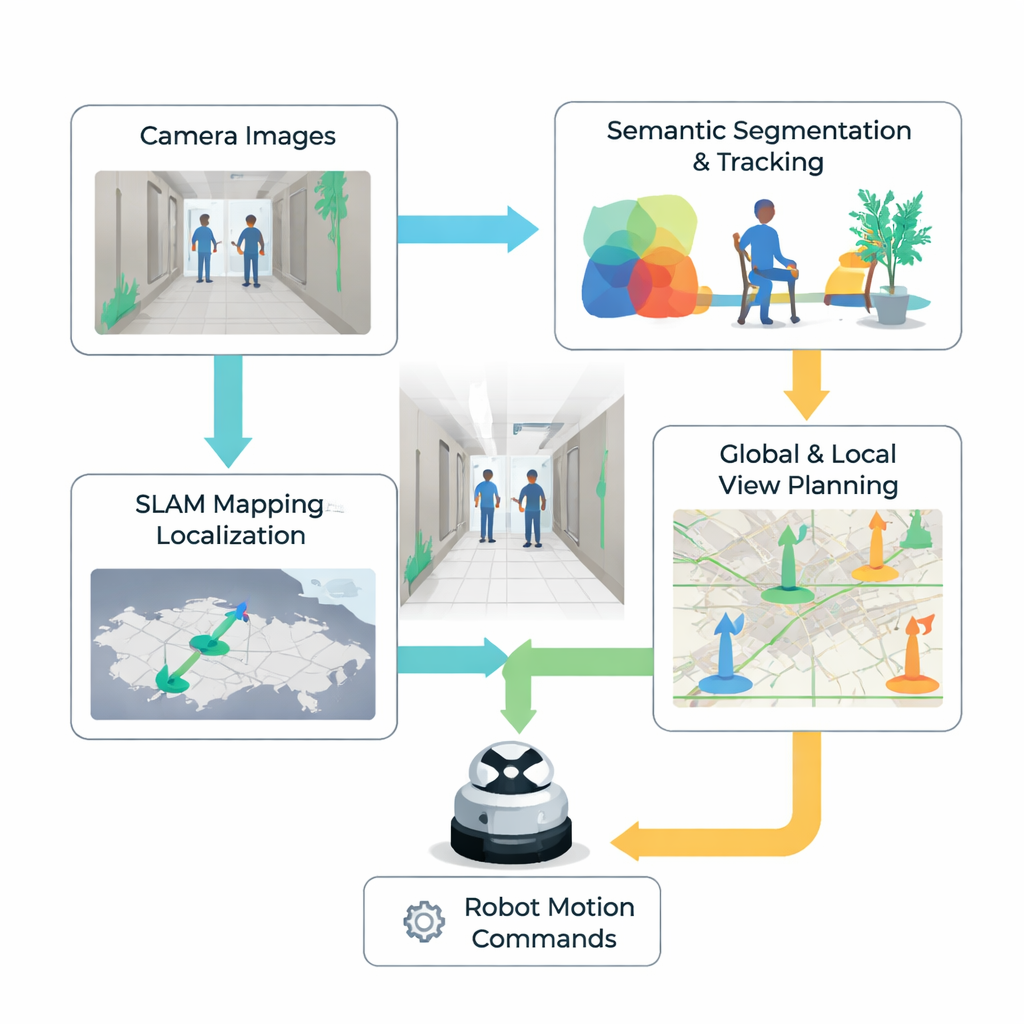
Bağımsız gezinmek için birçok robot, bir kamera yardımıyla hem harita çıkarıp hem pozisyon tahmini yapan görsel SLAM tekniğini kullanır. Bu, durağan ortamlarda iyi çalışır ama insanlar yanından geçerken, görüşü kapattığında veya nesneler taşıdığında hızla bozulur. Yaygın bir çözüm, robotun insanları, araçları ve sandalyeleri tanıyıp harita oluştururken bunları yok saymasını sağlayan “semantik” görseldir. Ancak bu, kendi yollarını seçen aktif robotlar için yeni bir sorun yaratır: çok fazla görsel ipucunu atarlarsa, nerede olduklarını tamamen kaybedebilirler. Kameranın sınırlı görüş açısı bunu daha da zorlaştırır; tek bir yakından geçen kişi robotun gözünden faydalı sahnenin çoğunu gizleyebilir.
Nereye Bakılacağına Karar Vermede İki Seviyeli Strateji
Yazarlar, bir robotun bir sonraki görüş noktalarını daha bilgili şekilde seçmesine yardımcı olan hiyerarşik bir karar sistemi öneriyor. Üst seviyede robot, boş, dolu ve bilinmeyen alanların kuşbakışı bir ızgara haritasını tutar. Olası uzak görüş noktalarını, her birinin bu haritadaki belirsizliği ne kadar azaltacağını tahmin ederek değerlendirir; bu, bilgi kuramından alınmış bir kavramdır. Robot, keşfedilmemiş geniş bölgeleri açığa çıkaran noktalara öncelik verirken ne kadar yol kat etmesi gerektiği ve kamerayı ne kadar çevirmesi gerektiğini de göz önünde bulundurur. Umut vaat eden bir alan seçildikten sonra, alt seviyedeki bir süreç devreye girer ve robotun dar kamera görüşüyle gerçekten yeterli ayrıntıyı görebilmesi için mahalle içinde tam olarak nasıl hareket etmesi ve yüzünü nereye çevirmesi gerektiğini ince ayarlar.
Stabil Olanı Görme ve Hareketli Olandan Uzak Durma
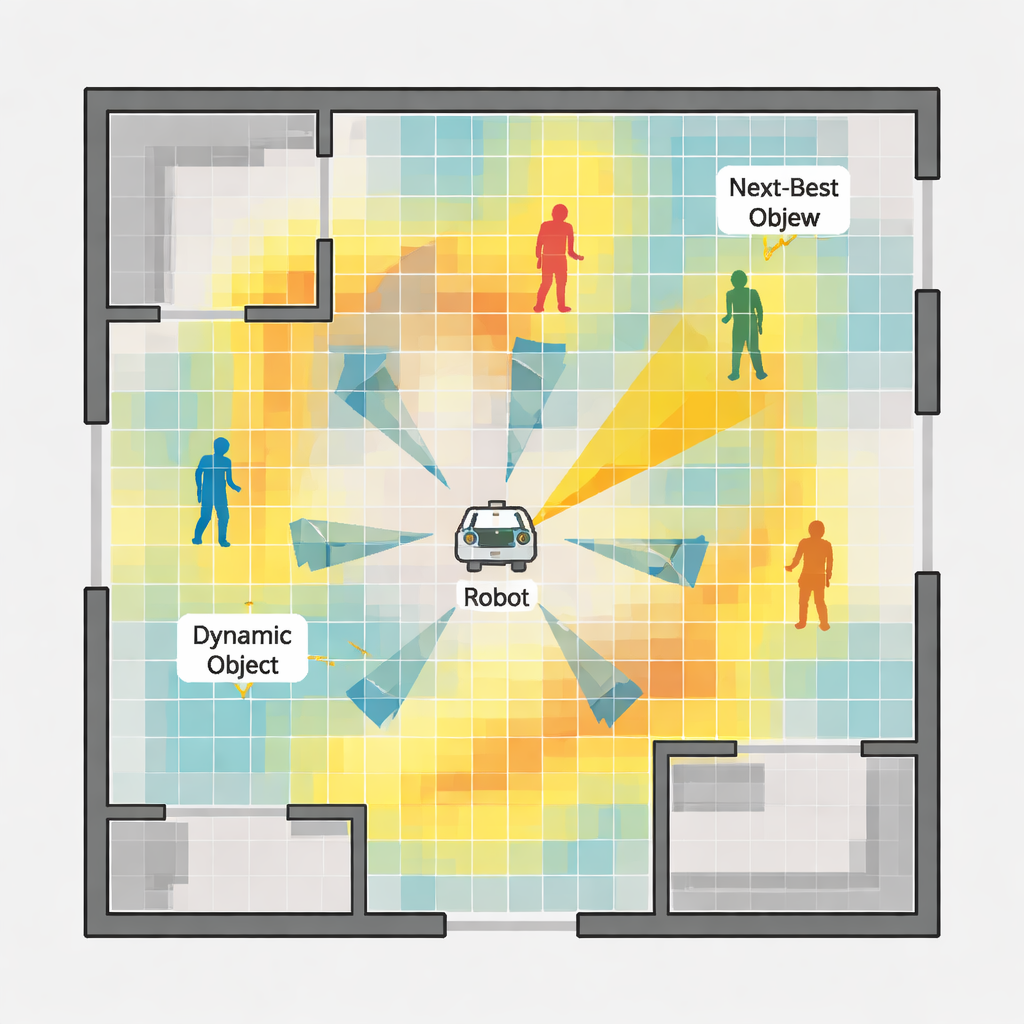
Yerel karar sürecinin merkezinde her kamera görüntüsünden oluşturulan bir “özellik olasılık haritası” vardır. Önce sistem, zaman içinde muhtemelen stabil kalacak ve hareket takibi için faydalı olacak görsel dönüm noktalarını—köşeler ve sahnedeki desenler—tespit eder. Ardından modern bir nesne algılayıcı kullanarak insan gibi hareketli olabilecek nesneleri bulur ve bunları kareler arasında izler. Bu nesnelerin nasıl hareket ettiğini analiz ederek sistem yalnızca şu an nerede olduklarını değil, yakın gelecekte nerede olma olasılığı olduğunu da tahmin eder. Bu iki bilgi kaynağı görüntü üzerinde bir ısı haritasında birleştirilir: parlak bölgeler güvenilir dönüm noktalarını görme olasılığının yüksek olduğunu gösterirken, daha koyu bölgeler ya özellik bakımından zayıf ya da hareketli nesneler tarafından kapanma ihtimali yüksek yerleri işaret eder. Robot bu haritayı, sola dönme, sağa dönme veya ileri gitme gibi küçük hareketlerin hangisinin bir sonraki adımda en net ve en stabil görüşü vereceğini değerlendirmek için kullanır.
Sanal Dünyalarda ve Gerçekte Test Etme
Araştırmacılar yaklaşımlarını farklı boyut ve karmaşıklıkta iki simüle edilmiş iç mekan alanında—her biri dolaşan sanal yayalarla dolu—ve ardından gerçek bir iç mekanda hareket eden fiziksel bir robot üzerinde test ettiler. Yöntemlerini, esas olarak alanı kaplamayı veya seyahat mesafesini kısaltmayı amaçlayan birkaç yerleşik keşif stratejisiyle karşılaştırdılar. Simülasyonlarda yeni sistem, daha az bozulma içeren haritalar üretti ve benzer ya da daha kısa sürede keşif yaparken daha iyi konum doğruluğu sağladı. Ayrıca pozisyon takibini kaybetme veya hareketli insanlara rahatsız edici derecede yaklaşma olasılığı daha düşüktü. Gerçek dünya deneyinde yöntem, piyasada bulunan bir robot bilgisayarında gerçek zamanlı olarak çalıştı; bu da laboratuvar dışında uygulanabilir olduğunu doğruladı.
Günlük Yaşam Robotları İçin Anlamı
Basitçe söylemek gerekirse, bu çalışma insanların etrafta olduğu durumlarda robotun nerelere bakacağına ve nereye gideceğine daha seçici davranmayı öğretiyor. Sahnelerin anlaşılmasını, hareket tahminini ve bilgi kazancı ölçüsünü birleştirerek robot, yalnızca en yakın keşfedilmemiş köşeye doğru ilerlemek yerine hem bilgi verici hem de güvenli görüşlere doğru yönlenebiliyor. Bu, iç haritasını daha güvenilir ve hareketlerini daha öngörülebilir kılıyor; bu özellikler, kalabalık ortamlarda insanlarla birlikte çalışmak zorunda olan robotlar için çok önemli. Ani büyük kalabalıkların kamerayı kapatması gibi bazı zorluklar devam etse de, yaklaşım gerçek yaşamın dağınık, dinamik doğasını zarifçe idare edebilen ev ve hizmet robotlarına doğru atılmış bir adımı temsil ediyor.
Atıf: Yang, Z., Sang, A.W.Y., Muthugala, M.A.V.J. et al. Mutual information-based hierarchical NBV decision for active semantic visual SLAM under dynamic environments. Sci Rep 16, 5847 (2026). https://doi.org/10.1038/s41598-026-36259-x
Anahtar kelimeler: aktif SLAM, robot navigasyonu, dinamik ortamlar, semantik haritalama, sonraki en iyi görünüm