Clear Sky Science · tr
Denizaltı itki sisteminde ters yönde dönen sabit mıknatıslı senkron motoru optimize etmek için pekiştirmeli öğrenme destekli model öngörü kontrolü
Daha Gizli Denizaltılar İçin Daha Akıllı Motorlar
Modern denizaltılar, okyanusları keşfetmek ve bilimsel, ticari veya savunma görevlerini yerine getirmek için sessiz ve verimli itkiye güvenir. Bu çalışma, iki pervaneyi zıt yönde döndüren özel bir elektrik motoru türünü inceliyor; bu, denizaltının suda düzgün ve sessiz hareket etmesine yardımcı oluyor. Araştırmacılar, gelişmiş öngörü araçlarını bir öğrenme algoritmasıyla harmanlamanın, dalgalar, akıntılar ve ani manevralar tarafından rahatsız edilse bile bu motorların kararlı ve verimli kalmasını nasıl sağlayabileceğini gösteriyor.
İki Pervane, Tek Kararlı Denizaltı
Geleneksel tek pervaneli sistemler, özellikle yüksek hızlarda denizaltıda burulma ve yuvarlanmaya yol açarak manevrayı zorlaştırır ve tespiti kolaylaştırır. Bunu önlemek için mühendisler, aynı mil üzerine monte edilmiş ama zıt yönde dönen iki pervaneyi kullanan ters dönüşlü pervane sistemleri uygular. Bu düzenin merkezinde, temelde üst üste konmuş iki kompakt, yüksek torklu elektrik motoru olan ters yönlü sabit mıknatıslı senkron motor (CRPMSM) bulunur. Bu düzen istenmeyen burulma kuvvetlerini giderir, enerji kullanımını iyileştirir ve gürültüyü azaltır; bunların tümü dalgaların altındaki gizlilik ve uzun görevler için hayati önemdedir. Ancak, iki rotor üzerindeki yük dengesiz hale geldiğinde —örneğin türbülanslı su veya ani dönüşlerde— her iki tarafı mükemmel uyum içinde döndürmek ciddi bir kontrol zorluğu haline gelir. 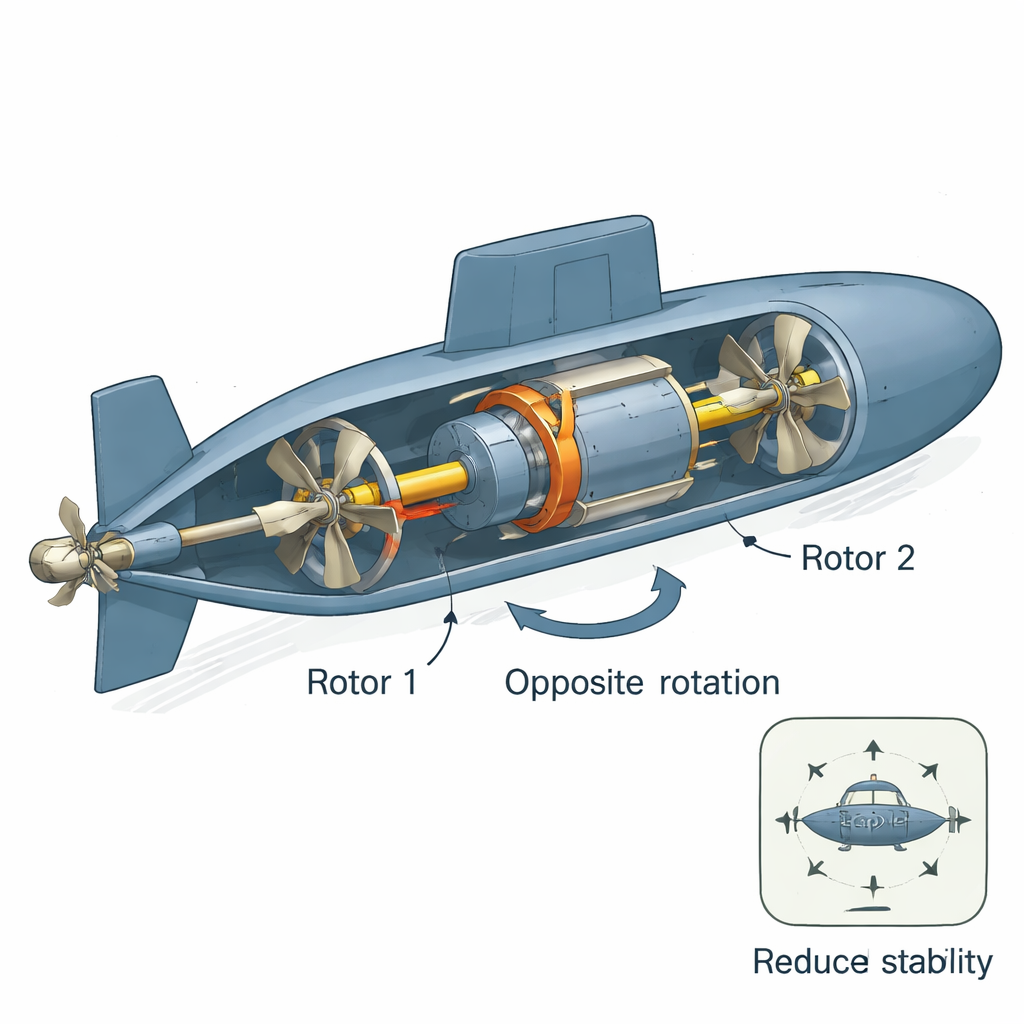
Neden Geleneksel Kontrol Yetersiz Kalıyor
Mühendisler, CRPMSM rotorlarını senkronize ve verimli tutmak için pek çok kontrol stratejisi denediler. Alan odaklı kontrol ve doğrudan tork kontrolü gibi yöntemler sakin, öngörülebilir koşullarda iyi çalışabilir, ancak sualtı ortamı hızla değiştiğinde veya son derece düzensiz hale geldiğinde zorlanırlar. Kayma modlu, bulanık ve adaptif kontrol gibi daha sofistike teknikler dayanıklılığı artırsa da genellikle motorun ve çevresindeki suyun çok hassas matematiksel modellerine dayanır. Pratikte, bu modeller asla mükemmel değildir ve uyumsuzluklar tork dalgalanmalarının artmasına, bozulmalardan sonra iyileşmenin yavaşlamasına ve enerji israfına yol açabilir. Kısa bir gelecek penceresinde optimal kontrol hamleleri planlayan Model Öngörü Kontrolü (MPC) hızlı tepki sunar ancak hâlâ temel modelin kalitesine sıkı sıkıya bağlıdır.
İş Başında Öğrenen Hibrit Bir Denetleyici
Yazarlar, her iki yaklaşımın güçlü yönlerini birleştiren hibrit bir Pekiştirmeli Öğrenme destekli Model Öngörü Kontrol (RL-MPC) çerçevesi öneriyor. MPC, CRPMSM nin matematiksel bir modelini kullanarak akımların, torkun ve hızın önümüzdeki birkaç kontrol adımında nasıl evrileceğini tahmin eder ve istenen hız ile akım hedeflerini izlerken sınırları gözeten gerilim komutları seçer. Bunun üzerine, Twin Delayed Deep Deterministic Policy Gradient (TD3) algoritmasına dayanan bir pekiştirmeli öğrenme ajanı gerçek motorun nasıl davrandığını gözlemler. Hız hataları, akım hataları ve kontrol çabası küçük olduğunda ödül alarak, öğrenme ajanı zamanla modelleme hatalarını, dengesiz yükleri ve dışsal rahatsızlıkları telafi etmek için MPC çıktısını ayarlar. Bir uzay vektörü darbe genişlik modülasyonu aşaması daha sonra bu optimize edilmiş gerilim komutlarını motoru sürmek için invertörün anahtarlama sinyallerine çevirir.
Akıllı Motoru Teste Sokmak
Yaklaşımlarını değerlendirmek için araştırmacılar MATLAB/Simulink içinde 120 kW’lık bir ters dönüşlü motor sisteminin ayrıntılı bir simülasyonunu kurdular ve bunu üç gerçekçi çalışma senaryosunda test ettiler. Birincisinde, motor sabit hızda çalışırken her iki rotor üzerindeki yük değişti ama dengeli kaldı; ikincisinde, yük sabitken hız değiştirildi; üçüncüsünde, en zorlu durumda, rotorlar farklı yükler yaşarken hız set noktası sabit tutuldu. Her durumda, RL-MPC aynı öngörü ve kontrol ufukları kullanılarak geleneksel MPC ile doğrudan karşılaştırıldı. 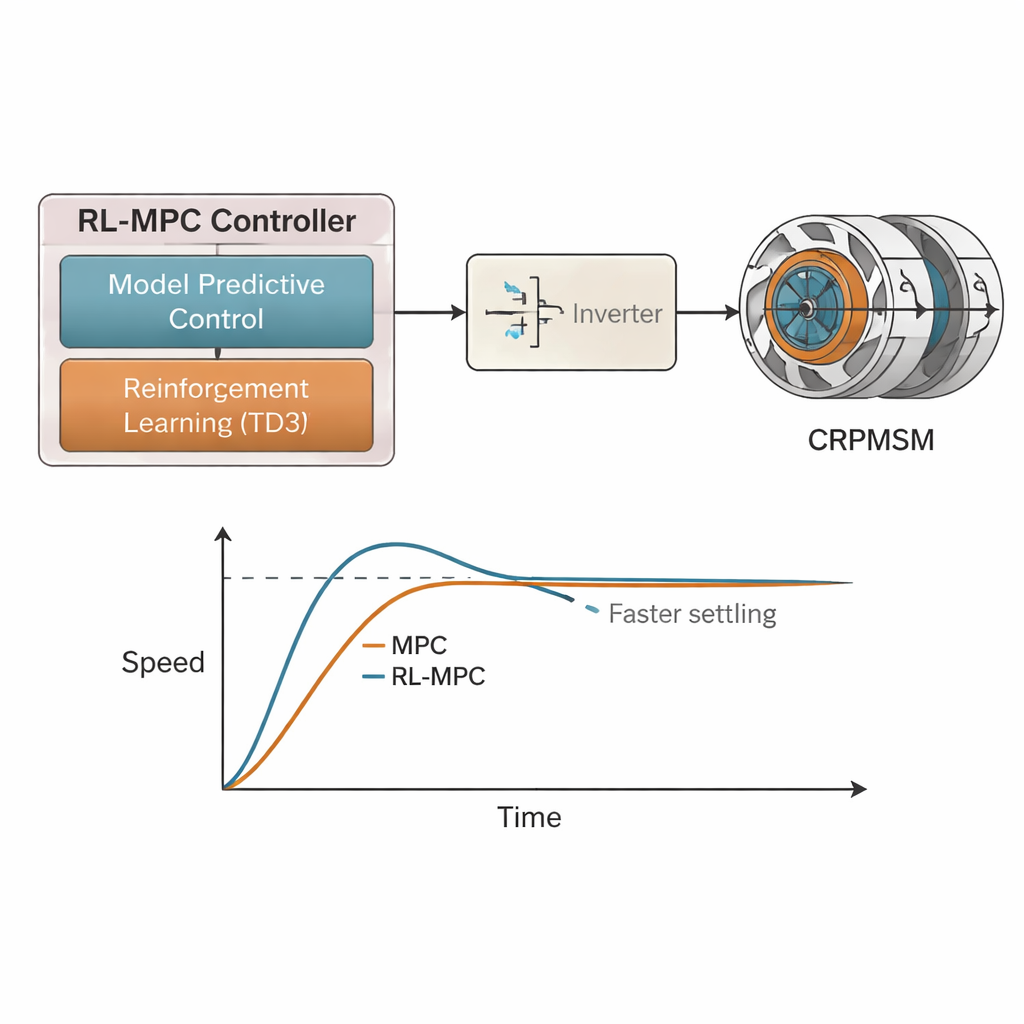
Daha Hızlı Tepki, Daha Temiz Akımlar, Daha İyi Senkronizasyon
Hibrit RL-MPC denetleyici tüm testlerde standart MPC’yi tutarlı şekilde geride bıraktı. Yükler veya hızlar ani değiştiğinde, RL-MPC hızdaki aşım miktarını yaklaşık %30’dan %15–16,6’ya düşürdü ve kararlı hale gelme süresini yaklaşık 1,4 saniyeden 0,7 saniyeye yarıladı. Tork dalgalanmaları daha küçüktü ve iki zıt dönen rotor, biri diğerinden daha ağır yüklendiğinde bile yakın senkronizasyonunu korudu. Aynı şekilde, stator akımlarının kalitesi belirgin şekilde iyileşti: zorlu dengesiz yük geçişleri sırasında toplam harmonik bozulma %60’tan fazla azalarak MPC için %9,3’ten RL-MPC için %3,4’e düştü ve kararlı durumda yaklaşık %2–3 civarına kadar inerken. Daha temiz akımlar daha az ısınma, daha sessiz çalışma ve daha yüksek genel verimlilik demektir.
Bu, Geleceğin Sualtı Taşıtları İçin Ne Anlama Geliyor
Uzman olmayan bir okuyucu için temel mesaj, öngörücü bir denetleyicinin üzerine bir öğrenme katmanı eklemenin denizaltı motorlarını hem daha akıllı hem de daha dayanıklı yaptığıdır. Deniz sertleştiğinde veya araç keskin manevra yaptığında tek başına başarısız olabilecek sabit denklemlere yalnızca güvenmek yerine, RL-MPC çerçevesi anında uyum sağlayarak çift rotorlu motoru senkron, hızlı ve verimli tutabilir. Elde edilen sonuçlar şu ana kadar simülasyona dayansa da gerçek donanımda ve gerçek okyanus koşullarında doğrulanması gerekecek; yine de bu çalışma, aynı enerjiyle daha uzağa giden, daha az gürültü çıkaran ve zorlu koşullarda kararlı ve kontrol edilebilir kalan geleceğin sualtı araçlarına işaret ediyor.
Atıf: Delelew, E.Y., Dulecha, K.A., Ararso, Z.T. et al. Reinforcement learning-driven model predictive control for optimizing counter-rotating permanent magnet synchronous motor in submarine propulsion system. Sci Rep 16, 5277 (2026). https://doi.org/10.1038/s41598-026-36126-9
Anahtar kelimeler: denizaltı itki, ters yönlü dönen motor, pekiştirmeli öğrenme kontrolü, model öngörü kontrolü, sualtı taşıtları