Clear Sky Science · tr
Akıllı şehir için İHA yol planlamasında PPO sezgisine sahip yön farkında ve kendini uyarlayan A* algoritması
Şehir Dronları için Daha Akıllı Rotalar
Gökyüzünde gökdelenler arasında kıvrılan küçük teslimat dronları filolarını, yoğun bir şehirde ilaç, paket veya acil malzeme dağıtırken hayal edin. Güvenli ve hızlı uçmak için her bir drone sürekli olarak bir sonraki adımda hangi yöne gideceğine karar vermelidir. Bu makale, dronların kalabalık üç boyutlu şehir alanlarında geleneksel yöntemlere göre daha kısa, daha düzgün ve daha güvenilir yollar bulmasını sağlayan yeni bir yaklaşım sunuyor.

İyi Bir Yol Bulmanın Neden Bu Kadar Zor Olduğu
Bir drone için bir yol seçmek, noktalar A ile B arasında düz bir çizgi çizmekten daha fazlasıdır. Binalardan, ağaçlardan ve yasak uçuş bölgelerinden kaçınmalı ve dönüş ile irtifa sınırlarına uymalıdır. İyi bilinen A* algoritması gibi klasik yol planlama yöntemleri basit haritalarda iyi işler ancak gerçekçi 3B şehir ortamlarında zorlanır. Genellikle çok fazla olası sonraki adımı kontrol ederler, hesaplama gücünü boşa harcarlar ve gereğinden uzun zikzaklı rotalar üretebilir veya çevre çok sıkışık olduğunda tamamen başarısız olabilirler. Akıllı şehirler geliştikçe bu zayıflıklar, güvenli ve verimli hava trafiği için ciddi bir darboğaz haline gelir.
Klasik Bir Araç için Yön Farkındalıklı Bir Yükseltme
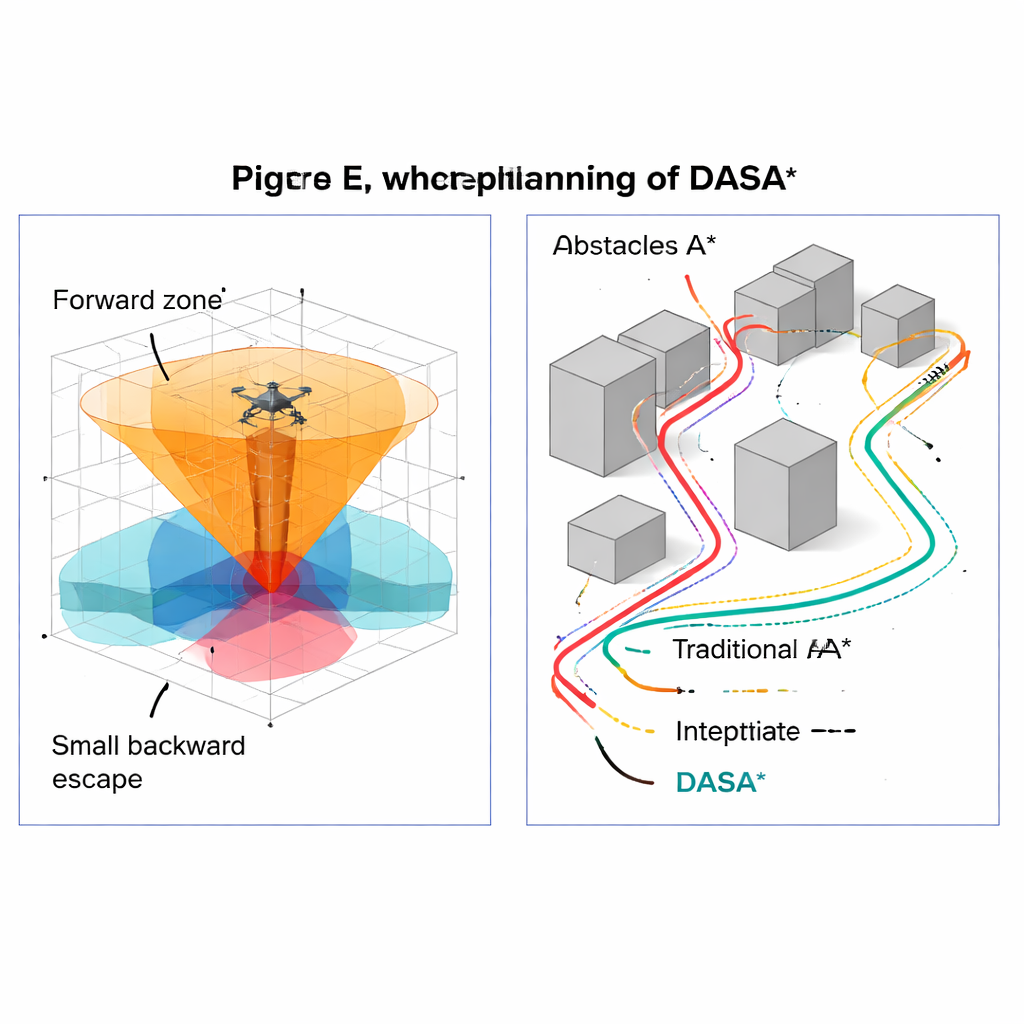
Yazarlar A* algoritması üzerine inşa ederek DASA* (Direction‑Aware and Self‑Adaptive A*) adını verdikleri geliştirilmiş bir versiyon öneriyor. Drone çevresinde körü körüne her yöne bakmak yerine DASA*, hedefin nerede olduğuna dikkat eder. Yakın aday pozisyonları üç katmana sınıflandırır: çoğunlukla hedefe doğru drone’un önünde olanlar, yanlarda olanlar ve çıkmazlardan kaçmaya yardımcı olabilecek arkada kalan küçük bir küme. Basit bir sıkışma algılayıcı, aramanın “takıldığı” işaretlerini izler ve gerektiğinde dar bir ön koniden daha geniş bir yakın çevreye otomatik olarak genişletir. Bu dikkatli, hedefe hizalanmış genişleme, geçerli bir rota varsa onun bulunmasını garantilerken boşa yapılan keşfi azaltır.
Kalabalık ve Açık Alanlara Uyum Sağlama
DASA*'ın bir diğer kilit özelliği, çevreye bağlı olarak adım büyüklüğünü değiştirmesidir. Drone engellerden uzaktayken algoritma daha büyük adımlar atar ve açık alanı hızla kat eder. Binalara veya diğer tehlikelere yaklaştığında ise daha küçük adımlara geçer ve dar boşluklarda hassas manevra yapmayı sağlar. Bu değişken “yakınlaştırma seviyesi”, planlayıcının güvenli olan yerlerde hızlı, doğruluğun önemli olduğu yerlerde ise yavaş hareket etmesine izin verir. Ham bir rota bulunduğunda, özel bir düzeltme aşaması gereksiz yol noktalarını kaldırır ve kalan ana noktalar üzerinden düzgün bir eğri uydurur. Sonuç, çarpışmalardan kaçınan ve bir uzman pilotun seçeceği doğal bir uçuş yoluna daha çok benzeyen, ani dönüşleri daha az olan bir rotadır.
Algoritmaya Öngörü Kazandırmak
Geleneksel A*, her pozisyonun hedefe ne kadar uzak olduğunu tahmin etmek için basit mesafe formüllerine dayanır. DASA* ise bu tahmin işini Proximal Policy Optimization (PPO) tabanlı öğrenilmiş bir kılavuzla değiştirir; PPO modern bir pekiştirmeli öğrenme tekniğidir. Bir eğitim ortamında sanal bir ajan, 3B uzayda hedefe doğru hareket etmeyi mesafe, yükseklik farkları ve yön bilgisi gibi algılarla tekrar tekrar uygular. Bir sinir ağı zamanla her durumun ne kadar umut verici olduğunu öğrenir ve eğitim sonrası DASA* için tak-çalıştır bir “sezgi modülü” olarak kullanılır. Bu öğrenilmiş sezgi, özellikle basit düz‑çizgi mesafenin yanıltıcı olduğu karmaşık düzenlerde aramayı iyi çözümlere daha doğrudan yönlendirir.
Sanal Şehirlerde Ne Kadar İyi Çalışıyor
Araştırmacılar, DASA*'ı kutu şeklindeki binalar ve gerçek kentsel yapıları taklit eden silindir engellerle dolu birden çok simüle edilmiş 3B şehir senaryosunda test etti. Klasik A* ve hızlı keşif ağaçlarının geliştirilmiş sürümleri, parçacık sürüleri, diferansiyel evrim ve Theta* adlı başka bir A* çeşidi dahil olmak üzere birkaç popüler alternatifle karşılaştırdılar. Birçok test vakasında DASA*, tutarlı şekilde daha kısa yollar buldu, çok daha az aday noktayı genişletti ve genellikle standart A*'a kıyasla 10 ila 50 kat daha hızlı çalıştı. Ayrıca yoğun, labirent benzeri ortamlarda bile mükemmel veya neredeyse mükemmel bir başarı oranı korudu; bazı rakip yöntemler daha sık başarısız olur veya uzun, dolambaçlı sapmalar üretiyordu.
Günlük Yaşam İçin Anlamı
Basitçe söylemek gerekirse, DASA* uçan robotlara daha iyi bir yön ve muhakeme yeteneği kazandırıyor. Ümit verici yönlere odaklanarak, yerel çevreye göre ayrıntı düzeyini uyarlayarak, başarma olasılığını öğrenilmiş bir sezgiyle değerlendirmek ve nihai rotayı cilalayarak ham harita verisini verimli, düzgün ve pratik uçuş yollarına dönüştürüyor. Gerçek sistemlerde benimsenirse, bu tür bir yaklaşım gelecekteki akıllı şehirlerin dron teslimatlarını, denetimlerini ve acil müdahalelerini gökyüzü daha yoğunlaşsa ve ortamlar daha karmaşık hale gelse bile daha güvenli ve daha güvenilir şekilde yönetmesine yardımcı olabilir.
Atıf: Zhang, X., Tan, L. & Chai, J. Direction aware and self-adaptive A* algorithm with PPO heuristic for UAV path planning of smart city. Sci Rep 16, 6174 (2026). https://doi.org/10.1038/s41598-026-36066-4
Anahtar kelimeler: İHA yol planlaması, akıllı şehir dronları, A* algoritması, özerk navigasyon, robot hareket planlaması