Clear Sky Science · tr
Semantik segmentasyonla yönlendirilen pekiştirmeli öğrenme kullanarak yapısal olmayan açık alanlarda otonom navigasyon
Ormanda Yürümeyi Öğrenen Robotlar
Küçük bir robotun GPS veya bir insanın kumandasına gerek duymadan, ağaçlar ve kayalar arasında kıvrılarak orman patikasında kendi başına yürüyebildiğini hayal edin. Bu makale, bu tür robotlara sık ağaçlı ormanlarda yolları "görmeyi" ve anbean güvenli şekilde nasıl ilerleyeceğine karar vermeyi öğreten bir sistemi anlatıyor. Bu çalışma, orman izleme, orman yangınlarını önleme, arama-kurtarma ve uydu sinyallerinin zayıf veya hiç olmadığı yerlerde açık hava teslimatı gibi görevlerde yardımcı olabilecek geleceğin robotları için önem taşıyor.
Neden Ormanlar Robotlar İçin Bu Kadar Zor?
Ormanlar otonom makineler için en zorlu ortamlardan biridir. Patikalar dar ve dolambaçlı olabilir, zemin engebelidir, dallar ve çalılıklar görüşü sık sık engeller ve yüksek ağaçlar GPS sinyallerini güvenilmez kılar. Geleneksel navigasyon yöntemleri hassas haritalara, güçlü GPS'e veya pahalı lazer sensörlerine dayanır ve genellikle şehir sokakları veya fabrika zemini gibi açık, yapılandırılmış alanları varsayar. Ormanda bu varsayımlar çöker: gölgeler, mevsimsel değişiklikler ve yoğun bitki örtüsü basit görme sistemlerini yanıltır; kural tabanlı kontrolörlerse gerçek bir patikada ortaya çıkan dağınık, beklenmedik durumlarla başa çıkmakta zorlanır.
Birlikte Çalışan Üç Beyin
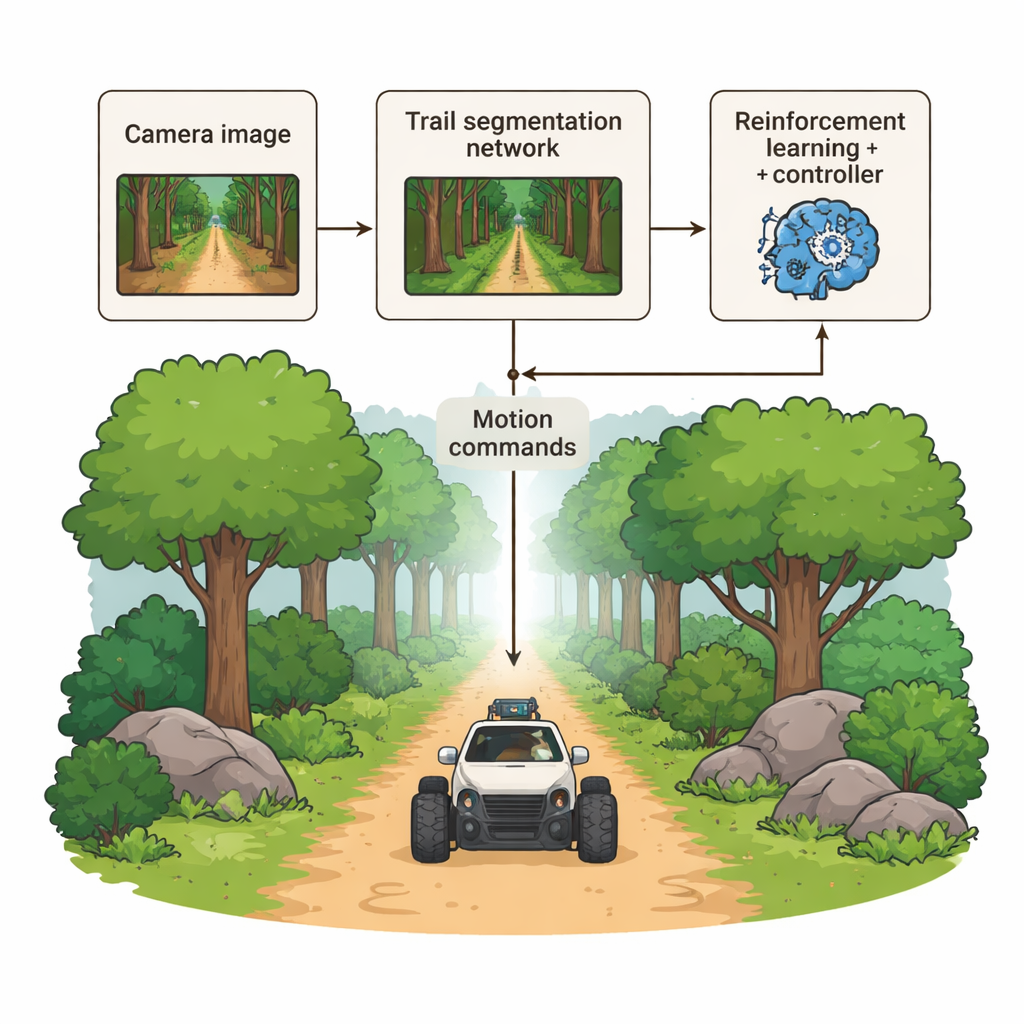
Yazarlar, robotlara üç tamamlayıcı "beyin" veren hibrit bir navigasyon sistemi öneriyor. Birincisi, derin bir görme modülü her kamera görüntüsünü inceleyip neredeyse piksel piksel hangi kısımların yürünebilir patikaya ait olduğunu işaretliyor. İkincisi, öğrenmeye dayalı karar modülü pekiştirmeli öğrenme kullanarak düzgün direksiyon ve hız komutları seçiyor; patikada kalmayı, çarpışmalardan kaçınmayı ve hedefe verimli şekilde ulaşmayı ödüllendiriyor. Üçüncüsü, klasik bir kontrolör tahmin edilen patika şeklini kararlı tekerlek hareketlerine çeviriyor, ani hareketleri düzeltiyor ve robotun yolunu sarsıntılı değil zarif tutuyor. Tek, opak bir uçtan uca ağ yerine bu modüller ayrı fakat sıkı bağlı tutuluyor; bu mühendislerin her aşamayı anlamasını ve hata ayıklamasını kolaylaştırıyor.
Görmenin Patikayı Tanımasını Öğretmek
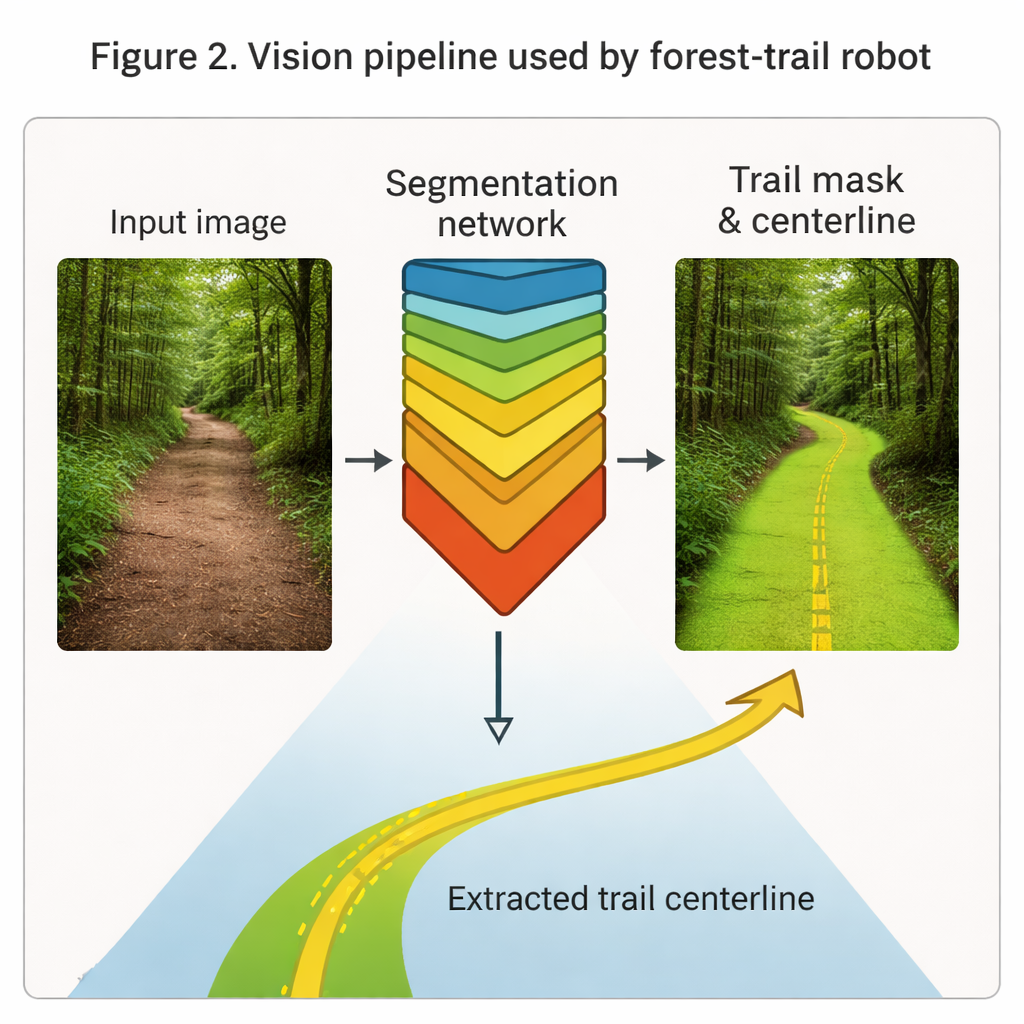
Robotun "gözlerinin" merkezinde Mask R-CNN olarak bilinen derin bir ağ var; burada sıradan renkli görüntülerde orman patikalarını vurgulayacak şekilde ayarlanmış. İnsan boyundan, farklı ışık, hava ve patika türlerinde çekilmiş neredeyse 24.000 etiketli kare üzerinde eğitilen sistem, her karede patika bölgesini temiz bir maske olarak boyamayı öğreniyor. Bu maskeden öndeki yolun yönünü ve eğriliğini yakalayan ince bir merkez hattı eğrisi çıkarılıyor. Testlerde görme modülü, insan tarafından çizilmiş etiketlerle yüksek örtüşme ve %90'ın üzerinde piksel doğruluğu elde ediyor; dallar veya gölgeler yolu kısmen gizlese bile patikaları sağlam şekilde çevreliyor. Bu geometrik ipuçları, "patikanın nerede olduğu"na dair kompakt bir tanım olarak öğrenme ve kontrol modüllerine doğrudan besleniyor.
Robota Doğru Seçimler Yaptırmayı Eğitmek
İkinci ana bileşen karar modülü; bu modül pekiştirmeli öğrenme adlı bir teknik kullanıyor. Robota tam olarak ne yapması gerektiği söylenmek yerine, gerçekçi bir simüle edilmiş ormanda eylemler denemesine izin veriliyor ve iyi sonuçlar için ödül, kötü sonuçlar için ceza veriliyor. Patika boyunca ilerlemek iyi; uzaklaşmak, engellere çarpmak veya takılıp kalmak kötü. Yaklaşık 150.000 eğitim adımı boyunca sistem, patikanın ortasında kalmayı sağlayan, virajları zarifçe yöneten ve dallar veya kayalar ortaya çıktığında makul şekilde tepki veren stratejiler keşfediyor. Hareketleri pürüzsüz ve güvenli tutmak için öğrenilmiş eylemler klasik kontrolörden gelenlerle harmanlanabiliyor; bu, özellikle keskin virajlarda veya gürültülü koşullarda faydalı oluyor.
Sistemi Teste Sokmak
Bu kombinasyonun ne kadar iyi çalıştığını değerlendirmek için araştırmacılar üç ayrıntılı sanal orman inşa ettiler: biri dar, dağınık patikalarla, diğeri dik, engebeli zemin ve büyük engellerle, üçüncüsü ise çatallanmalar, çıkmaz yollar ve yanıltıcı sahte patikalarla dolu. Bu haritalarda yapılan 90 denemede robot, bölümlerin yaklaşık %87’sinde çarpışma olmadan hedefine ulaştı; ortalama sadece 0,2 çarpma ile çalıştı ve tipik olarak patika merkezinden yaklaşık 30 santimetre içinde kaldı. Rotaları hızlı ve tutarlı şekilde tamamladı. Yazarlar modüllerden birini veya birkaçını kaldırıp sadeleştirdiklerinde performans keskin şekilde düştü—bu da üç bileşenin de gerekli olduğunu gösteriyor. Lazer tarayıcı kullananlar dahil diğer güncel sistemlerle karşılaştırıldığında, bu yalnızca görmeye dayalı hibrit yaklaşım başarı oranı, hassasiyet ve güvenlik bakımından en iyi genel dengeyi sundu.
Gerçek Dünya Robotları İçin Anlamı
Bir uzman olmayan için çıkarım şu: Robotlar dikkatli ve yetkin patika kullanıcıları gibi yürümekte giderek daha başarılı hale geliyor. Güçlü bir görsel bağlam hissi ("burası yol"), uygulamaya dayalı karar verme ("bu hamleler daha önce işe yaradı") ve istikrarlı bir direksiyon mekanizmasını birleştirerek önerilen sistem, küçük tekerlekli bir robotun harita veya GPS olmadan karmaşık ormanlarda gezinmesini sağlıyor. Çalışma simülasyonda test edilmiş olup aşırı aydınlatma ve nadir patika türleri gibi zorluklarla karşılaşmaya devam etse de, insanların vahşi ortamlarda güvenle paylaşabileceği, ormanları denetlemeye, kurtarma ekiplerini desteklemeye ve doğal kaynakları daha etkili yönetmeye yardımcı olabilecek saha robotları için pratik bir plan sunuyor.
Atıf: Tibermacine, A., Tibermacine, I.E., Akrour, D. et al. Autonomous navigation in unstructured outdoor environments using semantic segmentation guided reinforcement learning. Sci Rep 16, 2633 (2026). https://doi.org/10.1038/s41598-026-36022-2
Anahtar kelimeler: otonom navigasyon, orman robotikleri, bilgisayarlı görme, pekiştirmeli öğrenme, semantik segmentasyon