Clear Sky Science · tr
PMSM için geliştirilmiş süper-bükülmeli kayma-modu gözlemcisi ve düzgün geçiş optimizasyonuna dayalı tam hızda konum sensörsüz kontrol stratejisi
Ek donanım olmadan elektrik motorlarını akıllı tutmak
Elektrikli arabalar’dan uçak aktüatörlerine kadar birçok modern makine, kalıcı mıknatıslı senkron motor (PMSM) adı verilen özel bir elektrik motoruna dayanır. Bu motorlar verimli ve güçlüdür, ancak genellikle ne kadar hızlı döndüklerini ve rotörün nerede olduğunu izleyen hassas sensörlere ihtiyaç duyarlar. Sensörler maliyet ekler ve zorlu ortamlarda arızalanabilir. Bu çalışma, bu motorları tüm hız aralığında mekanik sensör kullanmadan nasıl pürüzsüz ve doğru şekilde çalıştırabileceğimizi inceliyor.
Sensörlerden kurtulmak neden bu kadar zor?
Tipik bir PMSM sürüşünde, rotörün tam olarak nerede olduğunu kontrol sistemine söylemek için motor miline küçük konum sensörleri takılır. Bu bilgi, akımı sargılara tam doğru zamanda vermek için hayati öneme sahiptir; adeta dönen bir atlıkarıncaya doğru zamanlanmış bir itme gibidir. Ancak sensörler kırılgan, hantal ve pahalı olabilir. Mühendisler uzun süredir rotör konumunu motorun kendi elektriksel sinyallerinden çıkaran "sensörsüz" yöntemlerle bunları değiştirmeye çalışıyor. Sorun şu ki, tek bir yöntem her hızda iyi çalışmıyor. Düşük hızda olağan elektriksel ipuçları zayıfken, yüksek hızda basit hileler gürültülü ve hatalı hale geliyor. Bu boşluğu sarsıntı, titreşim veya kontrol kaybı olmadan kapatmak sürekli bir zorluk olmuştur.
Motora dinlemenin iki akıllıca yolu
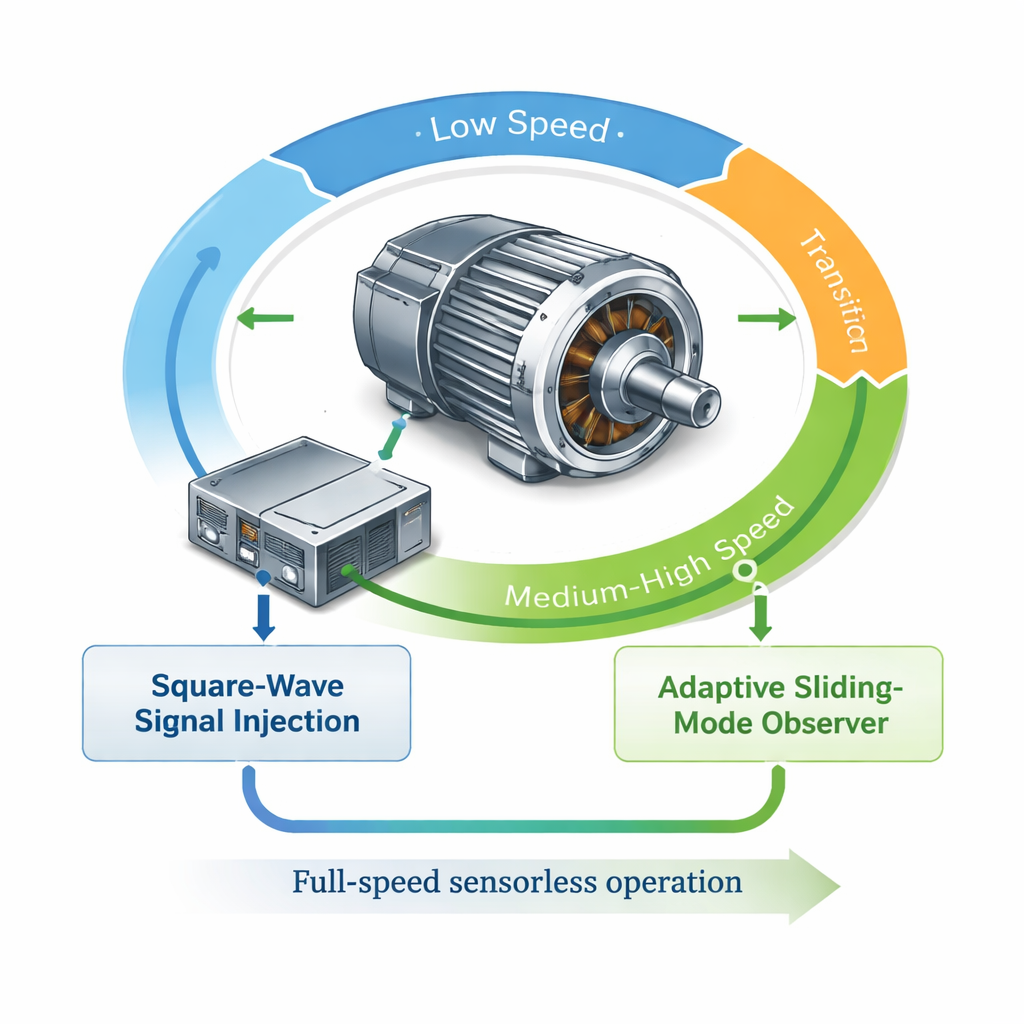
Tüm hız aralığını kapsamak için yazarlar iki tamamlayıcı sensörsüz tekniği birleştiriyor. Düşük hızlarda, motorun doğal elektriksel geribildirimi güvenilir biçimde ölçülemeyecek kadar zayıf olduğunda, sargılara kasıtlı olarak hızlı kare biçimli bir gerilim sinyali enjekte ediyorlar. Motor, rotör açısına bağlı olarak farklı tepki verir; bu nedenle ortaya çıkan yüksek frekanslı akımı inceleyerek denetleyici rotörün nerede olduğunu çıkarabiliyor. Bu "yüksek frekanslı enjeksiyon" yaklaşımı, nazik bir prob sinyali göndermek ve yankıyı okumak gibi davranır. Orta ve yüksek hızlarda ise motor daha güçlü doğal geribildirim, yani geri elektromotor kuvvet (back-EMF) üretir. Burada ekip, ölçülen gerilim ve akımlardan rotör konumunu ve hızını tahmin eden gelişmiş bir matematiksel gözlemci kullanıyor.
Sayısal gözlemciyi daha akıllı ve daha sessiz kılmak
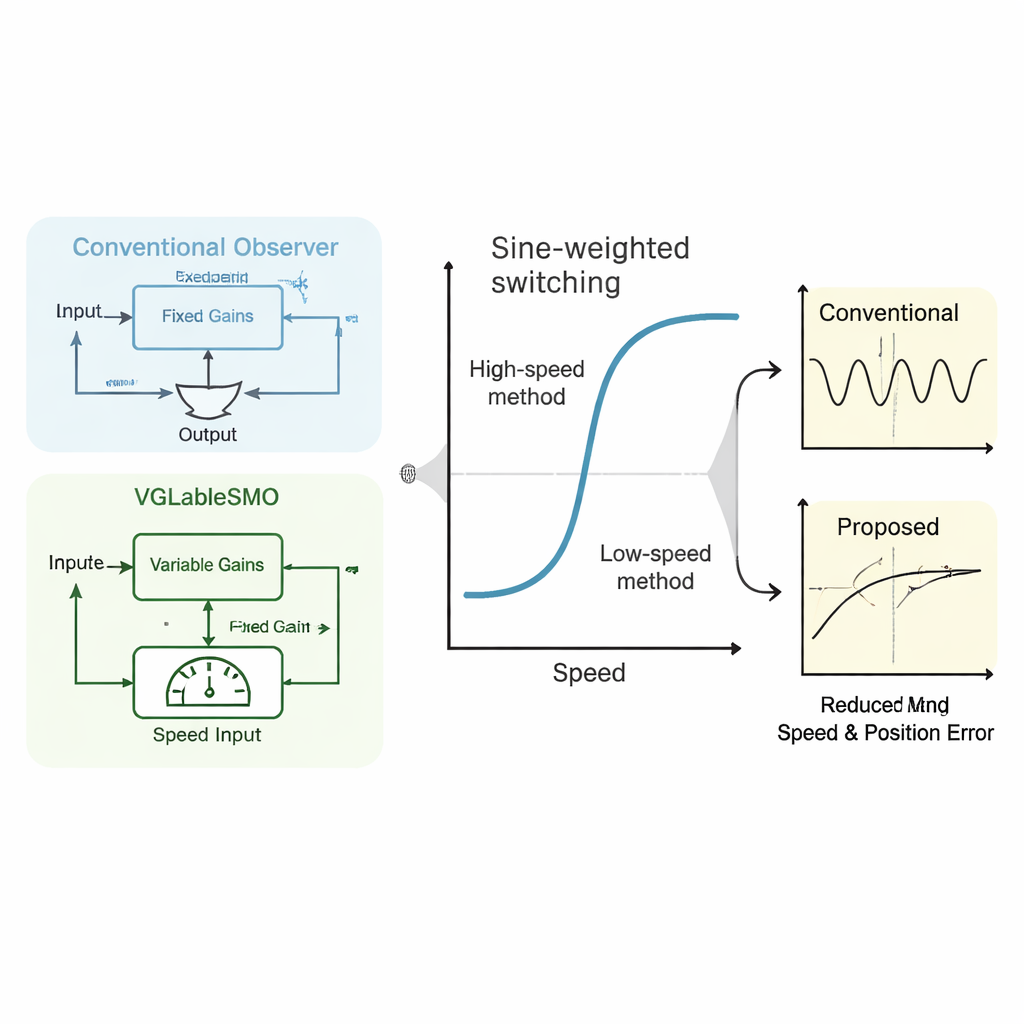
Yüksek hız tarafındaki temel yenilik, değişken kazançlı lineer süper-bükülmeli kayma-modu gözlemcisi (VGLSTSMO) adı verilen geliştirilmiş bir gözlemcidir. Geleneksel kayma-modu gözlemcileri gürültü ve dış etkilere karşı sağlam olmalarıyla beğenilir, ancak genellikle tork ve hıza yansıyabilen küçük ama hızlı salınımlar olan "chattering" (titreşim) sorununa sahiptirler. Ayrıca sabit iç ayarlara dayanırlar; bu ayarlar bir çalışma koşulunda iyi performans gösterirken başka bir durumda kötü olabilir. Önerilen gözlemci, iç kazançlarını motor hızı değiştikçe otomatik olarak ayarlıyor ve tahminleri gerçek değerlere nazikçe çeken düzeltici bir terim ekliyor. Uyarlamalı bir mekanizma ayrıca motorun iç gerilimi hakkındaki tahmini yeniden düzelterek hem hız hem de konum doğruluğunu artırıyor. Bilgisayar simülasyonları, bu daha akıllı gözlemcinin orta–yüksek hızlardaki konum hatasını yaklaşık 0.9 radyandan yaklaşık 0.2 radyana düşürdüğünü ve yük değişiminden sonra sistemin kararlı hale gelme süresini kısalttığını gösteriyor.
Düşük ve yüksek hızlar arasındaki el sıkışmasını yumuşatmak
İki farklı tahmin yöntemini çalıştırmak başka bir sorun daha doğurur: motor hızlanırken bunlar arasında nasıl pürüzsüz bir el değişimi yapılacağı. Basit bir yaklaşım, bir yöntemi azaltırken diğerini doğrusal ağırlıkla devreye almaktır, ancak bu yine de tork ve hızda çarpıntılara yol açabilir. Yazarlar daha nazik, sinüs biçimli bir ağırlıklandırma fonksiyonu öneriyor. Seçilen bir geçiş bandı içinde, kontrol sistemi düşük hız yönteminden yüksek hız gözlemcisine güveni keskin bir yükseliş yerine dalga benzeri pürüzsüz bir eğri izleyerek kademeli olarak kaydırır. Bu rafine karışım, değişim sırasında hız sıçramalarını ve açı hatalarını belirgin şekilde azaltır; geçici açı hatasını düşürür ve hataların yerleşme süresini yarı yarıya kısaltır.
Gerçek dünya makineleri için bunun anlamı
Genel olarak, düşük hızda motoru yoklayıp yüksek hızlarda uyarlamalı bir gözlemci kullanan ve bunlar arasında sinüs ağırlıklandırmasıyla geçiş yapan birleşik strateji, mekanik sensörler olmadan tüm hız aralığında istikrarlı ve doğru kontrol sağlar. Simülasyonlarda önerilen yöntem hız aşımını ve kararlı hataları küçük tutarken, gürültüye, aşınmaya ve rahatsızlığa yol açabilen sert chattering’den kaçınıyor. Günlük uygulamalar için bu, elektrikli araçlar, endüstriyel sürücüler ve itki sistemlerinin daha güvenilir, daha kompakt ve daha ucuz üretilebileceği; aynı zamanda hassas hareket kontrolünü kırılgan mil üstü sensörlere bağımlı olmadan koruyabileceği anlamına gelir.
Atıf: Zhang, X., Li, P., Wang, B. et al. Full-speed domain position sensorless control strategy for PMSM based on improved super-twisting sliding-mode observer and smooth transition optimization. Sci Rep 16, 5730 (2026). https://doi.org/10.1038/s41598-026-35994-5
Anahtar kelimeler: sensörsüz motor kontrolü, kalıcı mıknatıslı senkron motor, kayma-modu gözlemcisi, yüksek frekanslı sinyal enjeksiyonu, elektrikli sürücü sistemleri