Clear Sky Science · tr
Delta paralel robotların çalışma hacmine yapısal parametrelerin etkisi ve çay taze yaprak ayırma uygulamaları için yol uyumluluğunun optimizasyonu
Robotlar Çay Fabrikasına Giriyor
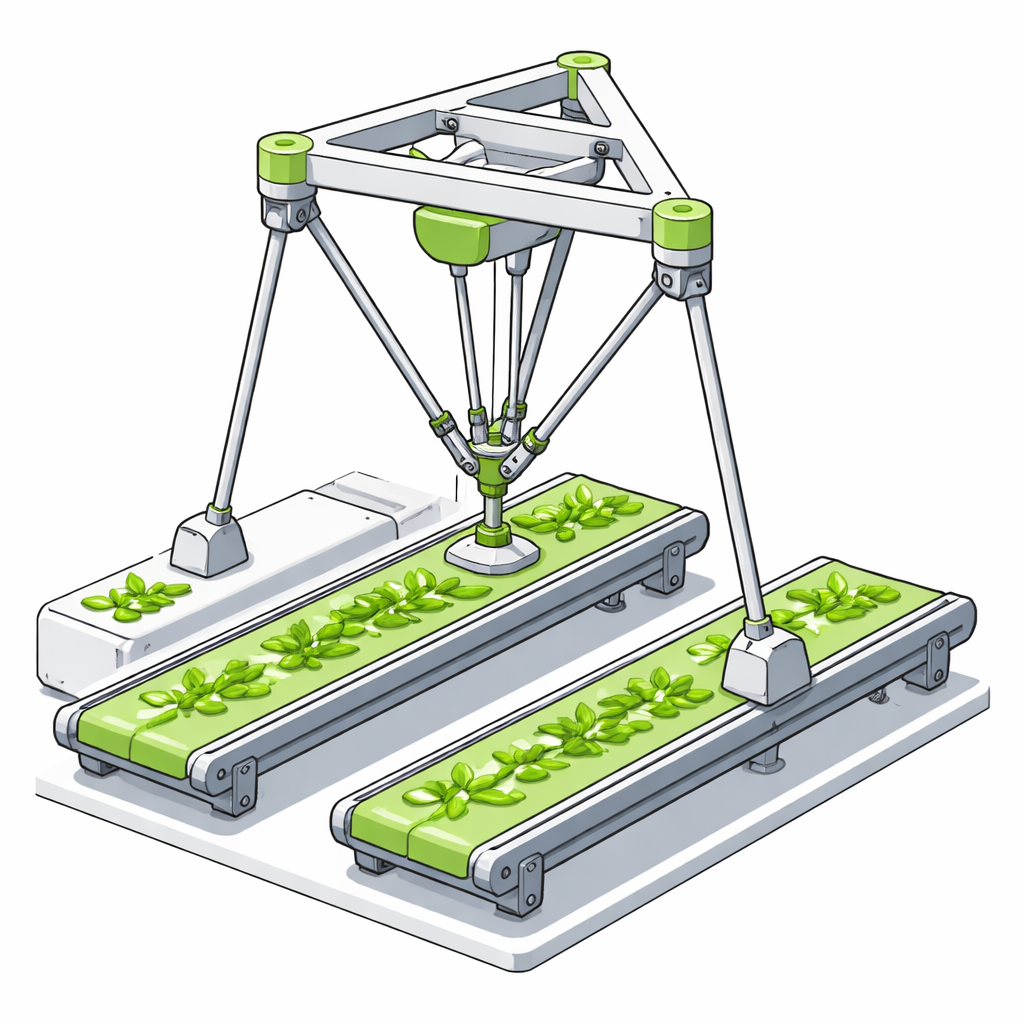
Taze çay yaprakları hassastır: bir tomurcuğu ezmek ya da bir yaprağı zedelemek nihai içeceğin kalitesini bozar. Buna karşın bu yaprakları elle ayırmak yorucu ve yavaş bir iştir. Bu makale, Delta robotu adı verilen hızlı, hafif bir endüstriyel robotun çay bantları üzerinde yaprakları nazikçe ve güvenilir biçimde tutup taşırken nasıl hızlı ve hassas hareket edecek şekilde ayarlanabileceğini araştırıyor.
Çay Yapraklarının Neden Özel Muameleye İhtiyacı Var
Modern çay işleme süreçlerinde taze yaprakların ayrıştırılması kalite ve fiyat açısından hayati önem taşır. İnsan işçiler, özellikle uzun vardiyalarda tempo ve tutarlılığı korumakta zorlanır. Yüksek hızlı paketlemede yaygın olarak kullanılan Delta robotlar doğal bir aday gibi görünür: sert, hassas ve etkileyici hızlarla hareket edebilirler. Ancak önceki çoğu tasarım kutu veya somun gibi genel nesneler için planlanmıştır; dar bir bölgede, iki konveyör bandı arasına sıkışmış kırılgan çay tomurcukları için değil. Robotun "çalışma hacmi" — ulaşabildiği üç boyutlu bölge — bu dar alana uymalı ve belirli bir kapı biçimli hareketi izleyebilmelidir: kavrama, kaldırma, karşıya hareket ve yerleştirme; kendi parçalarına çarpmadan ve hedefleri ıskalamadan.
Robotun Şekli Nerelere Ulaşabileceğini Nasıl Belirler
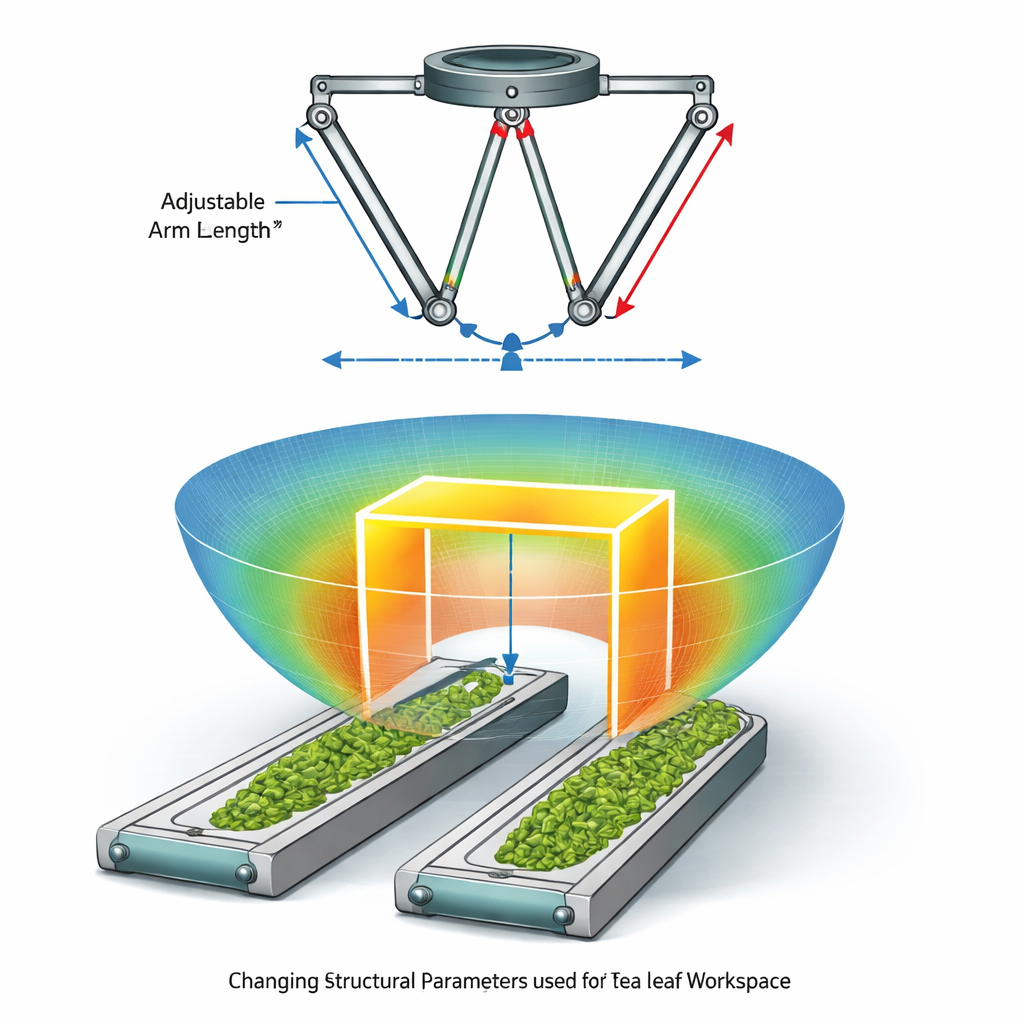
Yazarlar, Delta robotunun hareketini ayrıntılı bir matematiksel betimleme ile başlatıyor. Üç tahrik ekleminin açılarını, emme tutucuyu taşıyan küçük hareketli platformun kesin konumuyla ilişkilendiriyorlar. İleri (açılardan konuma) ve ters (konumdan açılara) hesaplamaları kullanarak, eklem açıları güvenli bir aralıkla sınırlandığında uç-efektörün fiziksel olarak ulaşabileceği her noktayı tanımlıyorlar. Bu denklemler MATLAB'de kodlandığında, robotun tam ulaşılabilir hacmini simüle edip, çeşitli bakış açılarından renkli, kase benzeri bir nokta bulutu olarak gösteriyorlar. Bu çalışma hacmi daha sonra belirli bir mekanik tasarımın çay ayırma yolunu karşılayıp karşılamadığını değerlendirmek için temel oluşturuyor.
Sanal Deneylerle Çok Sayıda Tasarımın Test Edilmesi
Birden fazla fiziksel prototip yapmak yerine ekip, dört temel geometrik seçeneği tasarım düğmeleri olarak ele alıyor: üst kol uzunluğu (L), alt kol uzunluğu (l), sabit taban üçgeninin yarıçapı (R) ve hareketli üçgenin yarıçapı (r). Ortogonal deney düzeni kullanarak bu dört parametrenin her birini üç seviyede etkin biçimde örnekliyor ve dokuz sanal robot üretiyorlar. Her biri için program toplam çalışma hacmini hesaplıyor ve 200 mm yüksekliğinde, 400 mm genişliğinde ve 200 mm derinliğinde standartlaştırılmış kapı biçimli yol kutusuyla nasıl örtüştüğünü gösteriyor. Bu, araştırmacıların her çalışma hacminin ne kadar büyük olduğunu değil, aynı zamanda çay yapraklarının bantlarda hareket ettiği bölgeyi gerçekten kapsayıp kapsamadığını görmelerini sağlıyor.
Hangi Boyutların En Önemli Olduğunu Bulmak
Dokuz simüle edilmiş tasarımı karşılaştırarak çalışma, her yapısal seçimin kullanılabilir erişimi ne kadar etkilediğini sıralıyor. Açık kazanan pasif (alt) kol uzunluğu: daha uzun alt kollar çalışma hacmini büyük ölçüde genişletiyor. Önemi ikinci sırada aktif (üst) kol uzunluğu geliyor; bu da hareket aralığını genişletirken çok uzun yapılırsa titreşimi artırabiliyor. Taban yarıçapının orta düzeyde bir etkisi var; taban çok genişse hareketli kollar çerçeveyle daha kolay çarpışıyor ve gerçekten kullanılabilir hacmi daraltıyor. Hareketli platformun yarıçapı en zayıf etkiye sahip, ancak daha küçük bir platform yine de kol hareketi için hafifçe alan açarak yardımcı oluyor. Aralık ve varyans analizleri gösteriyor ki bazı parametre setleri en büyük toplam çalışma hacmini verirken, dar ve kapı biçimli çay ayırma bölgesini mutlaka kapsamıyor.
Çay Hattına Uyan Bir Tasarım
En pratik konfigürasyon, genel olarak en büyük hacme sahip olan değil, çalışma hacmi kapı biçimli yörüngeyi düzgünce saran tasarım çıkıyor. Özellikle bir kombinasyon — 250 mm üst kollar, 400 mm alt kollar, 90 mm taban yarıçapı ve 50 mm hareketli platform yarıçapı — iki konveyör bandı arasındaki gerekli yolu tamamen kapsıyor; robotu kompakt ve kararlı tutuyor. Referans düzleminden yaklaşık 325 mm işletme yüksekliğinde robot en geniş kullanılabilir açıklığı elde ediyor; bu, her iki bandı kapsamak ve kavrama–kaldırma–çevirme–yerleştirme döngüsünü güvenli bölgenin dışına çıkmadan tamamlamak için fazlasıyla yeterli.
Geleceğin Çay Fabrikaları İçin Anlamı
Uzman olmayanlar için temel mesaj şudur: bir robotun kol uzunlukları ve platform boyutlarındaki küçük değişiklikler, etkileyici biçimde açık alanda hareket eden bir makine ile gerçek bir üretim hattında güvenilir biçimde çalışan bir makine arasındaki farkı yaratabilir. Bu çalışma, her yapısal parametrenin ulaşılabilir hacmi ve gerçekçi bir kapı biçimli yol ile örtüşmesini nicelendirerek çay yapraklarını hızlı, hassas ve minimum hasarla ayıran Delta robotlarının tasarımı için bir tarif sunuyor. Aynı yaklaşım, hız, hassasiyet ve nazik tutuşun bir arada gerekildiği her yerde diğer yiyecekler veya kırılgan ürünler için özel robotları yönlendirebilir.
Atıf: Ren, C., Zheng, W. & Wang, R. Influence of structural parameters on the workspace of delta parallel robots and path adaptability optimization for tea fresh leaf sorting applications. Sci Rep 16, 6651 (2026). https://doi.org/10.1038/s41598-026-35969-6
Anahtar kelimeler: delta robotu, çay yaprağı ayırma, robot çalışma hacmi, alma-ve-yerleştirme, endüstriyel otomasyon