Clear Sky Science · tr
Geri besleme doğrusal haleştirme ve uyarlanabilir kaymalı mod kontrolü ile optimal yakıt pili kontrol modellemesi
Neden daha akıllı yakıt pilleri günlük yaşam için önemli?
Hidrojen yakıt hücresi otomobiller, yalnızca su buharı şeklinde egzoz, hızlı yakıt ikmali ve uzun menzil vaat eder. Ancak her bir yakıt pili paketinin içinde ince membranlar ve titizlikle kontrol edilen gaz akışları güvenli sınırlar içinde kalmak zorundadır. Membranın bir tarafındaki basınç diğer tarafa göre çok yükselirse, membran zarar görebilir; bu da sistemin ömrünü ve güvenilirliğini kısaltır. Bu makale, bu basınçları daha hassas kontrol etmenin yeni bir yolunu araştırıyor; bu da gelecekteki yakıt pili araçlarının daha verimli çalışmasına, daha uzun ömre sahip olmasına ve gerçek dünya sürüş koşullarına karşı daha dayanıklı olmasına yardımcı olabilir.
Yakıt pilinin “akciğerlerini” dengede tutmak
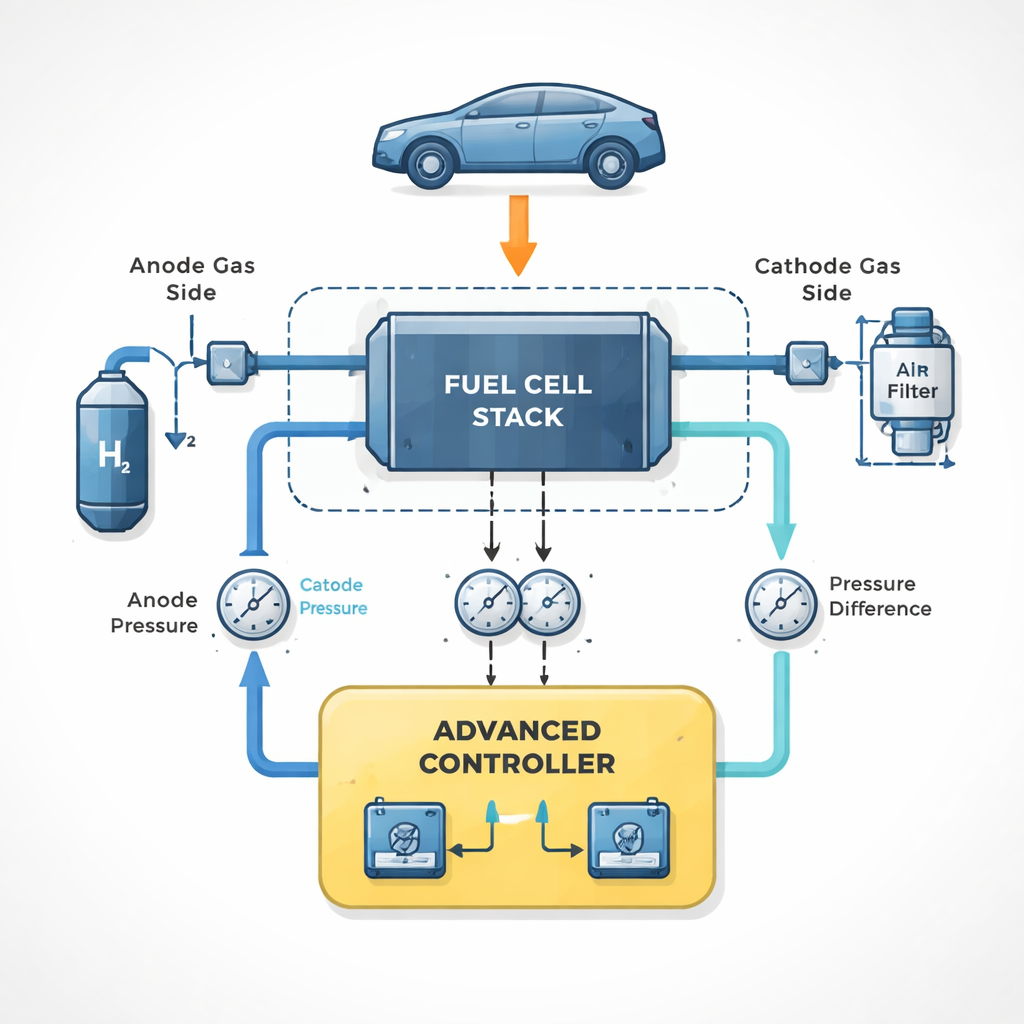
Proton değişim membranlı yakıt pili (PEMFC), bir bakıma otomobil için yapay bir çift akciğer gibi çalışır: hidrojen bir tarafa (anot), hava diğer tarafa (katot) beslenir. Elektrik, hidrojen ve oksijenin ince bir polimer membran üzerinden reaksiyona girmesiyle üretilir. Bu sürecin güvenli ve verimli olması için mühendislerin her iki taraftaki gaz akışını ve basıncını dikkatle düzenlemesi gerekir. Araçlarda ani hızlanmalar, frenlemeler ve purge (temizleme) işlemleri bu koşulları sürekli olarak bozarak anot ve katot arasındaki basınç farkının yükselip alçalmasına neden olur. Büyük veya sık tekrarlayan dalgalanmalar membranı yırtabilir veya yorabilir, bu da arızalara ve maliyetli değişimlere yol açar.
Geleneksel kontrol yöntemlerinin sınırlamaları
Mevcut yakıt pili sistemlerinin çoğu PID (proportional–integral–derivative) gibi geleneksel kontrol düzenlerine ya da kaymalı mod kontrolün temel sürümlerine dayanır. Bu yöntemler ortalama basınçları makul bir aralıkta tutabilir, ancak sistem yüksek derecede doğrusal olmayan davranış sergilediğinde zorlanır—sıcaklık, nem, gaz bileşimi ve yükün birlikte değiştiği durumlarda tam da böyle olur. Birçok önceki tasarım ayrıca yalnızca bir gaza, örneğin oksijen veya hidrojene odaklanmış ve katottaki azot ile su buharının rollerini sıklıkla ihmal etmiştir. Sonuç olarak, gaz akışı ve basıncı tam olarak koordine edilememiş, her sürüş koşulunda membran boyunca küçük ve güvenli bir basınç farkı garanti etmek zorlaşmıştır.
Karmaşık bir sistemi daha basit hale getirmek
Yazarlar bu zorluğu, gaz besleme sisteminin hidrojen, oksijen, azot ve su buharının hem anotta hem katotta yarattığı basınçları izleyen ayrıntılı bir fiziksel modelini önce kurarak ele alır. Ardından geri besleme doğrusal haleştirme adlı matematiksel bir teknik uygularlar. Basitçe söylemek gerekirse, bu teknik yakıt pili tanımlayan denklemleri yeniden şekillendirir, böylece kontrolör açısından dağınık doğrusal olmayan davranış, hidrojen basıncı için bir alt sistem ve oksijen basıncı için diğer bir alt sistem olmak üzere daha temiz, neredeyse doğrusal iki alt sistem gibi görünmeye başlar. Bu “ayrıştırma” (decoupling), kontrolörün hidrojen ve hava akışlarını birbirini beklenmedik şekilde bozacak değişiklikler olmadan daha bağımsız şekilde ayarlamasını sağlar.
Basınç kontrolü için uyarlanabilir bir emniyet ağı
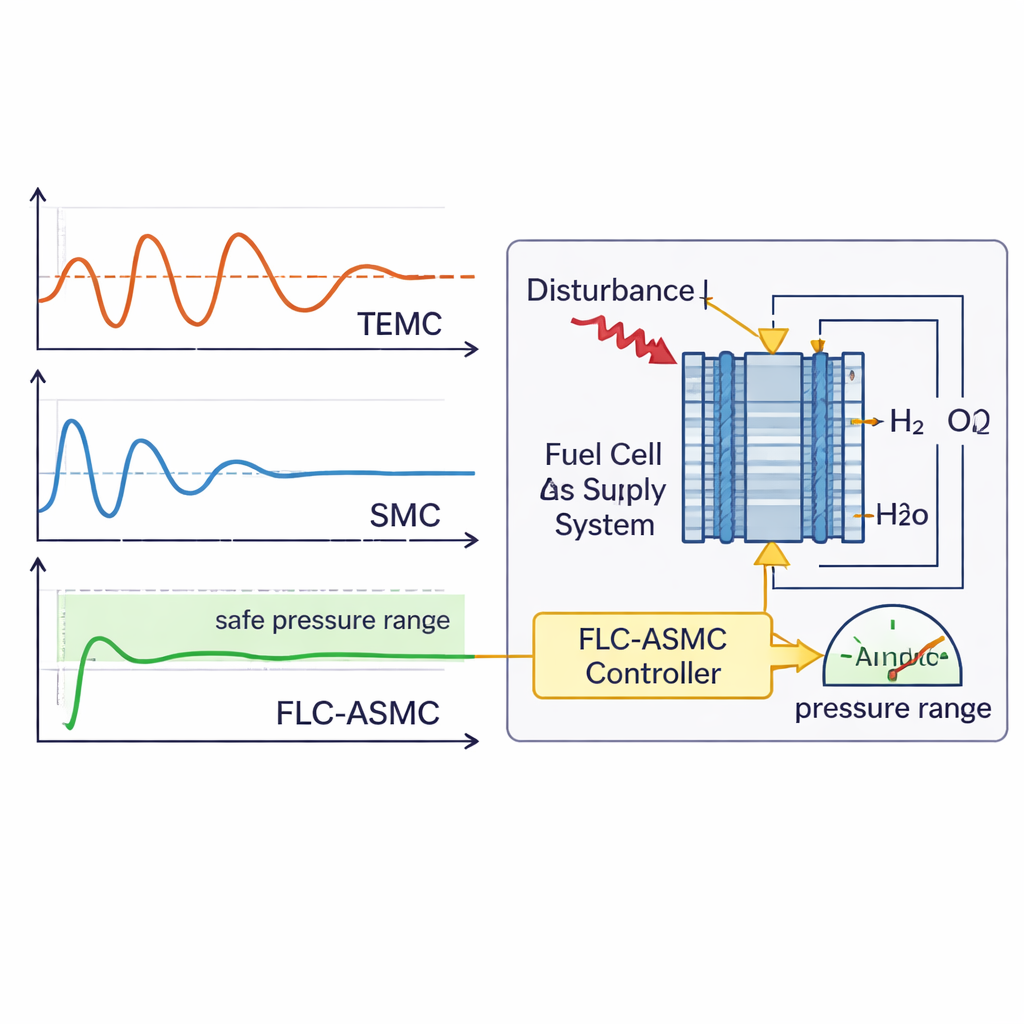
Bu ayrıştırılmış modelin üzerine araştırmacılar uyarlanabilir bir kaymalı mod kontrolör tasarlar. Kaymalı mod kontrol, izleme hataları uzayında bir tür hedef yüzey kullanır ve sistemi istenen basınca doğru bu yüzey boyunca kaymaya zorlayarak bozulmalara karşı güçlü bir dayanıklılık sağlar. Bununla birlikte, klasik sürümler chattering (titreşimli hızlı anahtarlama) adı verilen bir etkiye neden olabilir—valfleri veya kompresörleri aşındırabilecek hızlı geçişler. Burada kontrolör, iç parametrelerini basınç hatalarının büyüklüğüne göre sürekli uyarlamakta ve dar bir “sınır katman” içinde anahtarlama davranışını yumuşatmaktadır. Makalede FLC‑ASMC olarak adlandırılan bu birleşim, anot ve katot basınçlarını set noktalarına yakın tutarken, yük dalgalanmaları veya küçük modelleme hataları gibi bilinmeyen bozucu etkilere otomatik olarak karşılık verir.
Yeni kontrolör ne kadar daha iyi?
Takım kontrolörünü iki araç senaryosunu taklit eden simülasyonlarda test eder: yük akımında ani bir sıçrama ve dur‑kalk veya düzensiz sürüşü temsil eden sinüzoidal dalgalanmayla birleşmiş bir basamak değişikliği. Üç kontrolör karşılaştırılır: ayarlı bir PID, klasik bir kaymalı mod kontrolör ve önerilen FLC‑ASMC. Üçü de genel paket voltajını kararlı tuttuğu halde, membran üzerindeki kritik basınç farkını yönetmede büyük farklılıklar ortaya çıkar. PID kontrolör yaklaşık %85 izleme doğruluğu elde ederken, klasik kaymalı mod kontrol bunu yaklaşık %90–92’ye yükseltir ve yeni FLC‑ASMC %95’in üzerine çıkar. Yerleşme süresini yaklaşık %70’e kadar azaltır ve basınç farkındaki aşımı diğer yöntemlere kıyasla yaklaşık yarı yarıya düşürür; bunların hepsi salınımları önemli ölçüde azaltırken gerçekleşir.
Bu, geleceğin hidrojenli otomobilleri için ne anlama geliyor?
Bir uzma olmayan için ana mesaj, bu yeni kontrol stratejisinin yakıt pili araçları için daha akıllı, daha koruyucu bir “nefes düzenleyici” gibi davranmasıdır. Gaz akışlarını ve membranın her iki tarafındaki basınçları ayrıştırıp sıkı şekilde yöneterek, sürücü ani güç talepleri yaptığında veya yol koşulları karmaşık olduğunda bile basınç farkını güvenli bir bantta tutar. Bu, yakıt pilinin ömrünün uzaması, güvenilirliğin artması ve zorlu gerçek dünya işletimine karşı daha yüksek tolerans anlamına gelmeli; pratik hidrojenle çalışan ulaşımı günlük yollara bir adım daha yaklaştırmalıdır.
Atıf: Fan, S., Xu, S. Optimal fuel cell control modeling with feedback linearization and adaptive sliding mode control. Sci Rep 16, 5621 (2026). https://doi.org/10.1038/s41598-026-35888-6
Anahtar kelimeler: hidrojen yakıt hücresi araçları, PEM yakıt pili kontrolü, basınç farkı koruması, uyarlanabilir kaymalı mod kontrolü, geri besleme doğrusal haleştirme