Clear Sky Science · tr
Boron nötron yakalama terapisi için yüzey yönlendirmeli hasta pozisyonlama sisteminin geliştirilmesi ve değerlendirilmesi
Tümörle Savaşan Nötronlar için Daha Keskin Nişan
Boron Nötron Yakalama Terapisi (BNCT), çevredeki sağlıklı dokunun çoğunu koruyarak tümör hücrelerini seçici olarak zarar verebilen umut vadeden bir kanser tedavisidir. Ancak bu hassasiyetten fayda sağlanabilmesi için doktorların hastayı sabit bir nötron ışını önünde—çoğunlukla milimetre düzeyinde bir hassasiyetle—tam doğru konuma yerleştirmesi gerekir. Bu makale, bu ince ayarı daha hızlı, daha doğru ve teknisyenin sabit eli ile yargısına daha az bağımlı hale getirmek üzere kamera ve robot kontrollü yeni bir pozisyonlama sistemini tanımlıyor.
Pozisyonlamanın Neden Bu Kadar Önemli Olduğu
Hastanın etrafında dönebilen ve X‑ışını demetlerini şekillendirebilen birçok modern radyasyon cihazının aksine, BNCT demeti yönlendirme seçenekleri sınırlı, ağır ve sabit bir nötron kaynağına dayanır. Demeti değil, hasta doğru yere hareket ettirilmelidir. Geleneksel olarak personel bunu lazerler, cilt işaretleri ve manuel hasta yatağı kaydırmalarıyla yapar. Bu süreç yavaştır, operatörün becerisine güçlü şekilde bağlıdır ve tümör ile yakın organların gerçekte aldığı dozu değiştirebilecek küçük pozisyon hataları bırakabilir. BNCT merkezleri baş, boyun ve ulaşılaması zor diğer bölgelerdeki karmaşık tümörleri tedavi etmeye başladıkça, bu sınırlamalar ciddi bir engel haline gelir.
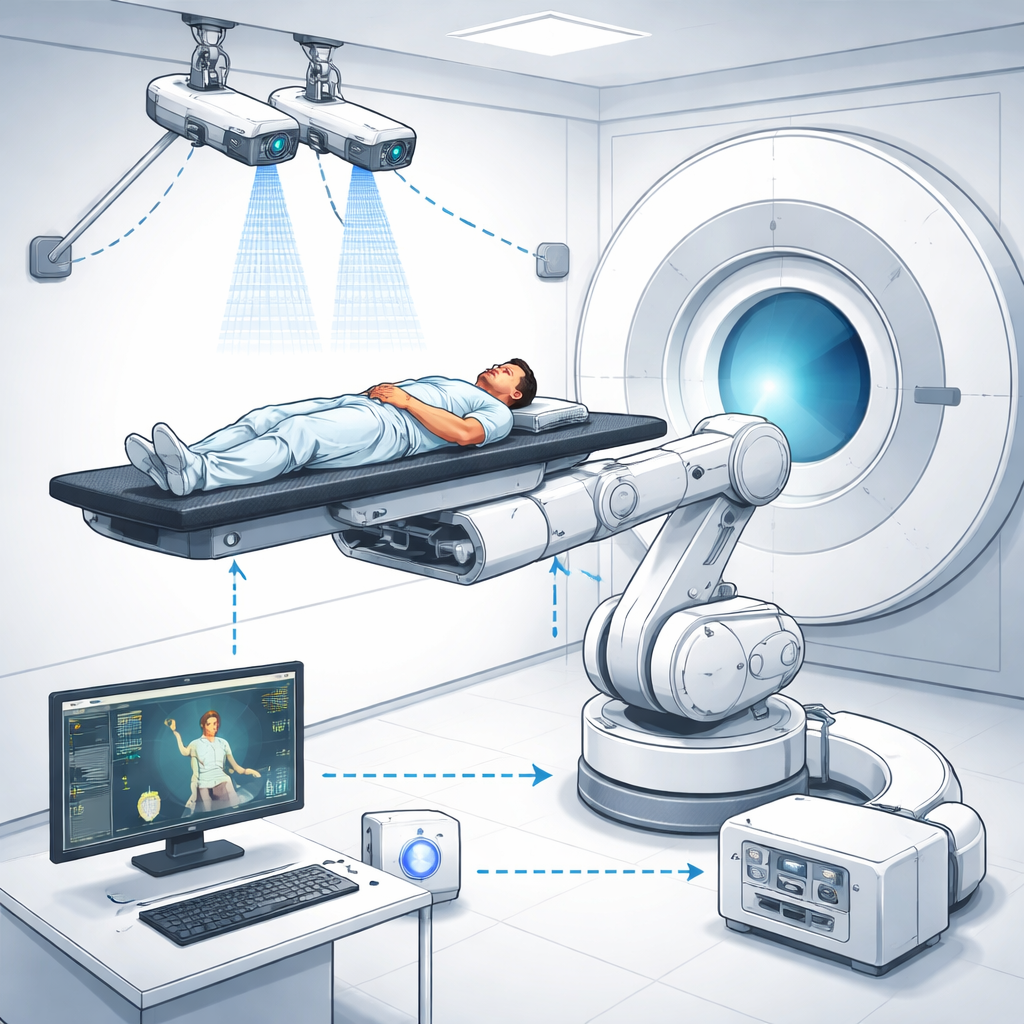
Yüksek Teknolojili Yardımcı: Kameralar, Yazılım ve Bir Robot
Bu sorunu ele almak için araştırma ekibi, üç ana bileşeni birleştiren entegre bir Yüzey‑Yönlendirmeli BNCT (SG‑BNCT) sistemi geliştirdi: NeuMANTA adlı özel bir tedavi planlama programı, bir çiftli stereo‑görüş kamerası ve hasta yatağını taşıyan altı eksenli bir endüstriyel robot. NeuMANTA’da doktorlar CT görüntüleri üzerinde BNCT tedavisini planlar; nötron demetinin geçmesi gereken tam noktayı ve hastanın cildi üzerine yerleştirilen üç küçük referans noktasını (fidüyal işaretler) belirtirler. Bu işaretler planlama görüntülerinde hastanın konumunu tanımlar ve matematiksel dönüşüm matrisleri aracılığıyla bu planı gerçek tedavi odası koordinatlarına bağlar.
3B Kameralar Kurulumu Nasıl Görür ve Düzeltir?
Tedavi odasında, iki yüksek çözünürlüklü kamera hastayı farklı açılardan izler, tıpkı insan gözleri gibi. Binlerce görüntü üzerinde eğitilmiş modern bir nesne tespit algoritması (YOLO) kullanılarak sistem, hastanın yüzeyindeki aynı fidüyal işaretleri hızla bulur. Her işaretin sol ve sağ kamera görüşünde nasıl göründüğünü karşılaştırarak bilgisayar, bu işaretlerin 3B konumlarını yeniden oluşturur ve yüzeyin ayrıntılı bir nokta bulutu haritasını çıkarır. Üç doğrusal olmayan işaretten bir hasta koordinat sistemi yeniden kurulur ve bu sistem tedavi planında tanımlanan koordinat sistemi ile karşılaştırılır. Planlanan ve gerçek pozisyon arasındaki herhangi bir uyumsuzluk, endüstriyel robot için çeviri ve dönme komutlarına—toplamda altı serbestlik derecesine—dönüştürülür.
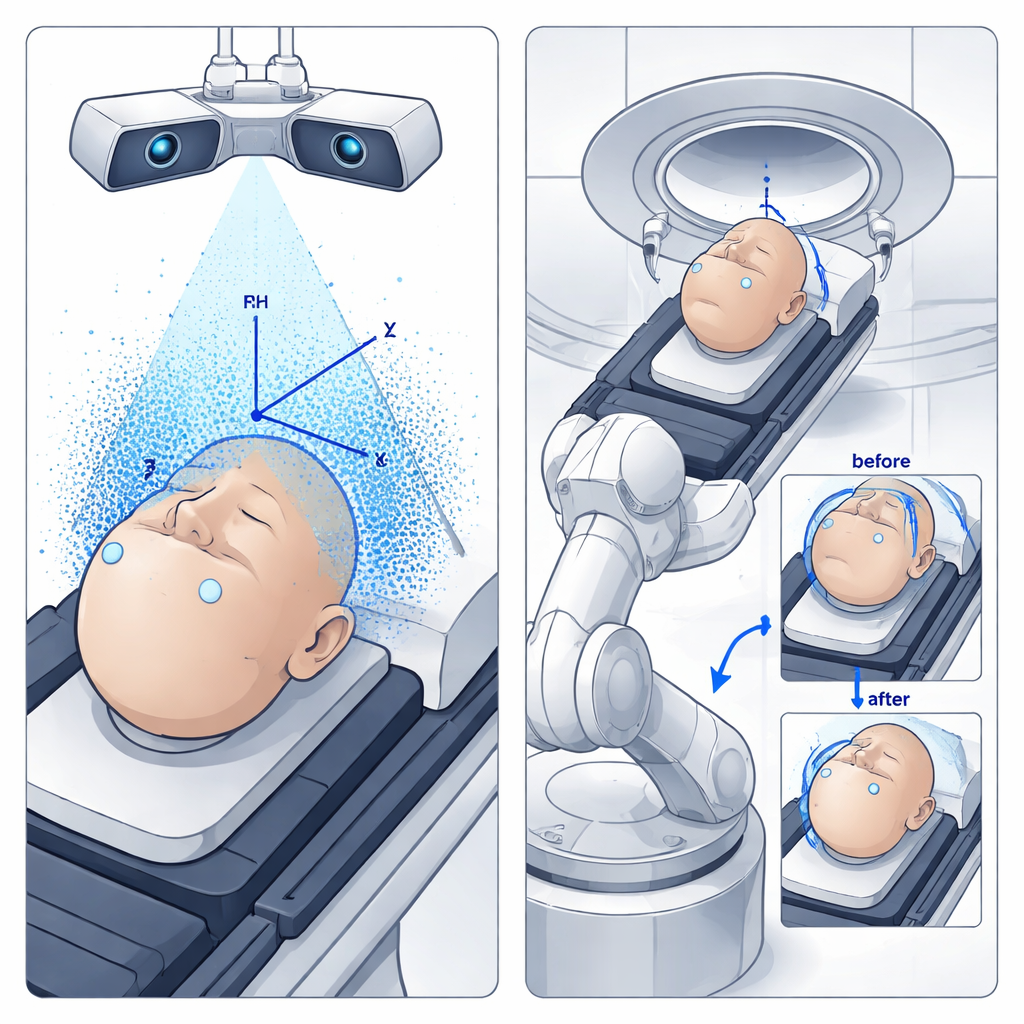
Gerçek Hasta Öncesi Bir Modelle Test
Sistemi gerçek hastalarda kullanmadan önce ekip, hem CT taramalarında hem de kameralar tarafından görülebilen iç ve yüzey işaretleriyle donatılmış antropomorfik bir fantom—insan biçimli bir model—ile test etti. NeuMANTA’da farklı demet yönlerine sahip birden çok tedavi kurulumu oluşturup, SG‑BNCT sisteminden fantomu bu planlara göre otomatik olarak yerine getirmesini istediler. Nötron demeti açıklığının merkezine yerleştirilen bir lazer gerçek demetin yerini temsil etti; böylece araştırmacılar son noktanın fantom üzerindeki hedeflenen noktadan demet doğrultusunda (kaynak‑cilt mesafesi) ve demete dik düzlemde yana doğru ne kadar saptığını doğrudan ölçebildiler.
Sistem Ne Kadar Yakınlaştı?
24 deneysel kuruluma yaygın olarak bakıldığında, sistemin pozisyonlama hataları her iki yönde tipik olarak 1 milimetrenin altındaydı; tek geçişteki en kötü hatalar demet ekseni boyunca yaklaşık 2–3 milimetreye ulaştı. Yazarlar bu kalan uyumsuzlukları üç ana kaynağa bağladılar: CT görüntü dilimlerinin kalınlığı, stereo kameraların küçük kalibrasyon belirsizlikleri ve yazılımın işaretleri algılarken oluşan piksel düzeyindeki ince doğruluksuzluklar. Önemli olarak, sistem kapalı döngü çalışacak şekilde tasarlanmıştır: işaret konumlarını tekrarlayarak yeniden ölçer, 3B hizalamayı günceller ve kalan hata önceden belirlenmiş eşik değerinin altına düşene dek robotun ek ince hareketlerini komutlandırır. Bu yinelemeli testlerde nihai sapmalar tutarlı şekilde 1 milimetrenin çok altına düştü ve hem derinlik hem de yana yönlerde alt‑milimetre hizalama elde edildi.
Bu Hastalar İçin Ne Anlama Geliyor?
BNCT’den fayda görebilecek—özellikle karmaşık veya hassas bölgelerde tümörü olan—hastalar için, bu yüzey‑yönlendirmeli, robot destekli pozisyonlama sistemi daha güvenilir ve verimli tedaviler vaat ediyor. Tedavi planlama yazılımını gerçek hastayı gören kameralara ve hassas hareketleri gerçekleştirebilen bir robota doğrudan bağlayarak yöntem, manuel lazer hizalamasına ve insan tahminine olan bağımlılığı azaltır. Mevcut versiyon gerçek zamanlı hareket takibi için henüz yeterince hızlı değil ve şimdilik sadece statik testler yapılmış olsa da, sonuçlar teknolojinin rutin olarak hastayı alt‑milimetre hassasiyetle konumlandırabileceğini gösteriyor. Hız geliştirmeleri ve donanımın radyasyon dayanıklılığı sağlandığında, bu yaklaşım klinikte daha güvenli ve tutarlı BNCT tedavileri için pratik bir altyapı haline gelebilir.
Atıf: Chen, J., Xie, QL., Ping, JJ. et al. Development and evaluation of surface-guided patient position system for boron neutron capture therapy. Sci Rep 16, 5818 (2026). https://doi.org/10.1038/s41598-026-35834-6
Anahtar kelimeler: boron nötron yakalama terapisi, hasta pozisyonlaması, stereo görüş, tıbbi robotik, yüzey yönlendirme