Clear Sky Science · tr
Zamanla çalışan bir konvolüsyonel ağ algoritmasının kanal dikkat modülü ile birleştirilmesinin UWB iç mekân konumlandırmaya uygulanması
İçeride İnsan Bulmayı Bu Kadar Zorlaştıran Nedir?
Akıllı telefonlar, robotlar ve depo robotları, binaların içindeyken GPS uydularının erişemediği durumlarda bile tam olarak nerede olduklarını bilmek zorunda. Centimetre düzeyinde doğrulukla mesafe ölçebildiği için ultra geniş bant (UWB) radyo, bu iş için öne çıkan adaylardan biri haline geldi. Ancak duvarlar, camlar ve hareketli insanlarla dolu yoğun gerçek mekânlarda bu radyo sinyalleri sık sık yansıyor, bükülüyor veya geçici olarak engelleniyor ve bu da raporlanan konumda ani sıçramalara yol açıyor. Bu makale, UWB konumlandırmayı böyle dağınık iç mekânlarda çok daha doğru ve kararlı hâle getiren yeni bir yapay zekâ tabanlı yöntemi inceliyor.
Kalabalık Bir Odada Radyo Atımları
UWB sistemleri, bir etiketi konumlandırmak için etiketi ile sabit birkaç baz istasyonu arasındaki son derece kısa radyo atımlarının ne kadar sürede ulaştığını ölçerek konumu belirler. Basit, açık alanlarda bu “varış zamanları” yaklaşımı iyi çalışır. Ancak iç mekânda sinyaller genellikle alıcıya ulaşmadan önce kapı, pencere ve insanlardan yansımalar gibi dolaylı yollar izler. Bu görüş hattı dışı yollar (NLOS) etiketi gerçekte olduğundan daha uzak gösterir. Geleneksel çözümler dikkatle tasarlanmış matematiksel filtrelere veya önce her sinyali temiz ya da bozucu olarak etiketlemeye çalışan makine öğrenimi araçlarına dayanır. Bunlar faydalı olmakla birlikte ya uzman ayarı gerektirir ya da insanlar mekânda öngörülemez şekilde hareket ettiğinde hâlâ zorlanır.
Verinin Zaman İçinde Anlatmasına İzin Vermek
Araştırmacılar farklı bir strateji öneriyor: her mesafe ölçümünü izole edilmiş olarak ele almak yerine, ölçümlerin zaman içinde nasıl değiştiğine bakıyor ve bir derin öğrenme modelinin bu desenleri öğrenmesine izin veriyorlar. Temel araçları, zaman serisi verileri için tasarlanmış bir sinir ağı türü olan zamansal konvolüsyonel ağ (TCN). Bir anı diğerinin ardından işleyen yinelemeli ağların aksine, TCN’ler eşzamanlı olarak uzun tarihçe parçalarını inceleyebilen bir boyutlu konvolüsyonlar kullanır. Bu tasarım yaygın eğitim sorunlarını önler ve modelin, bir kişinin etiket ile baz istasyonu arasına yürüyerek geçici olarak ölçülen mesafeyi uzatıp sonra geri çekilmesine benzer daha ince, uzun dönemli eğilimleri fark etmesine olanak tanır.
Ağın Neyeye Dikkat Etmesi Gerektiğini Öğretmek
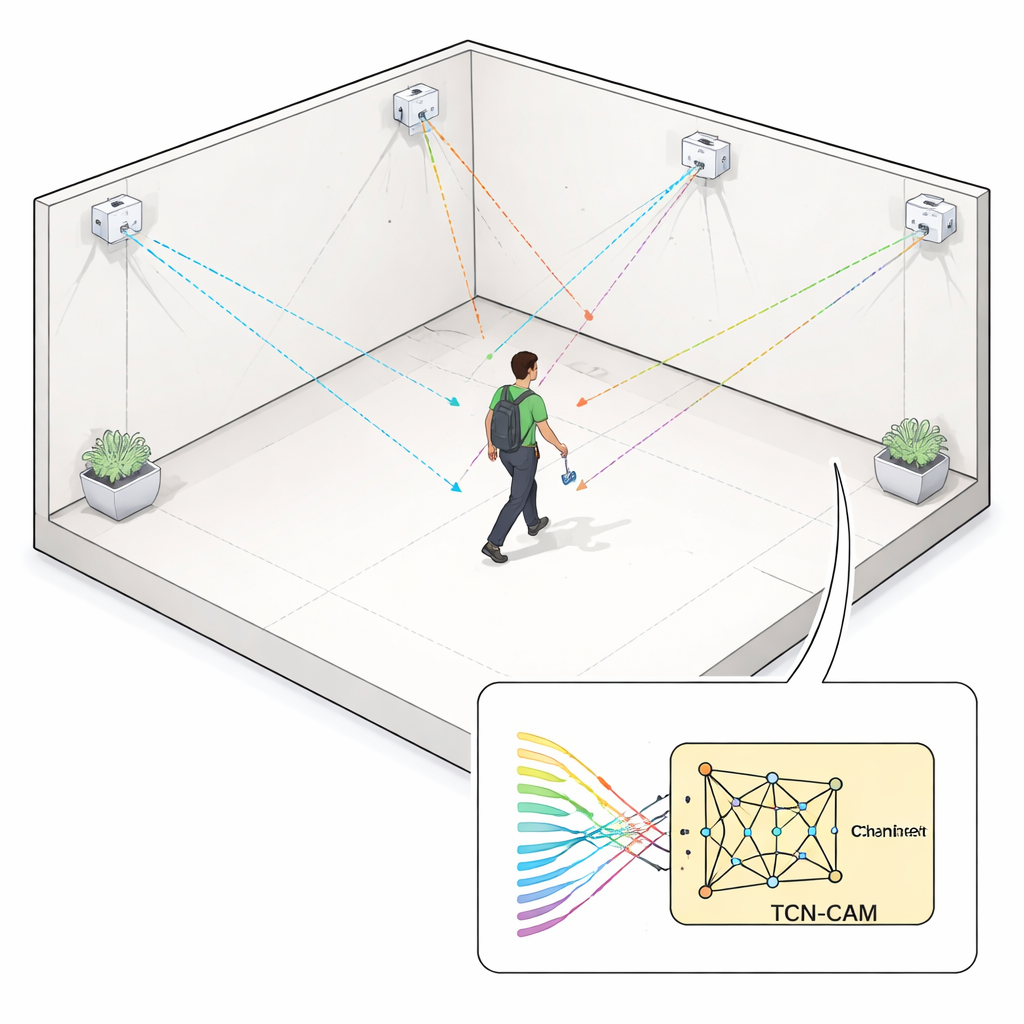
TCN’in üzerine, ekip bir kanal dikkat modülü (CAM) ekliyor. Her baz istasyonu kendi mesafe ölçüm akışını üretir ve her an hepsi aynı derecede güvenilir değildir. CAM, bu akışlara farklı ağırlıklar atamayı öğrenir; tutarlı görünenleri güçlendirir, yansımalar veya engellemelerle bozulmuş görünenleri ise azaltır. Birlikte, TCN‑CAM ağı altı baz istasyonundan gelen ham, gürültülü mesafeleri alır ve ayrı bir sinyal sınıflandırma aşaması olmadan tek bir uçtan uca adımda etiketin üç boyutlu koordinatlarının en iyi tahminini üretir.
Simüle Gürültü ve Gerçek Koridorlarda Test Etme
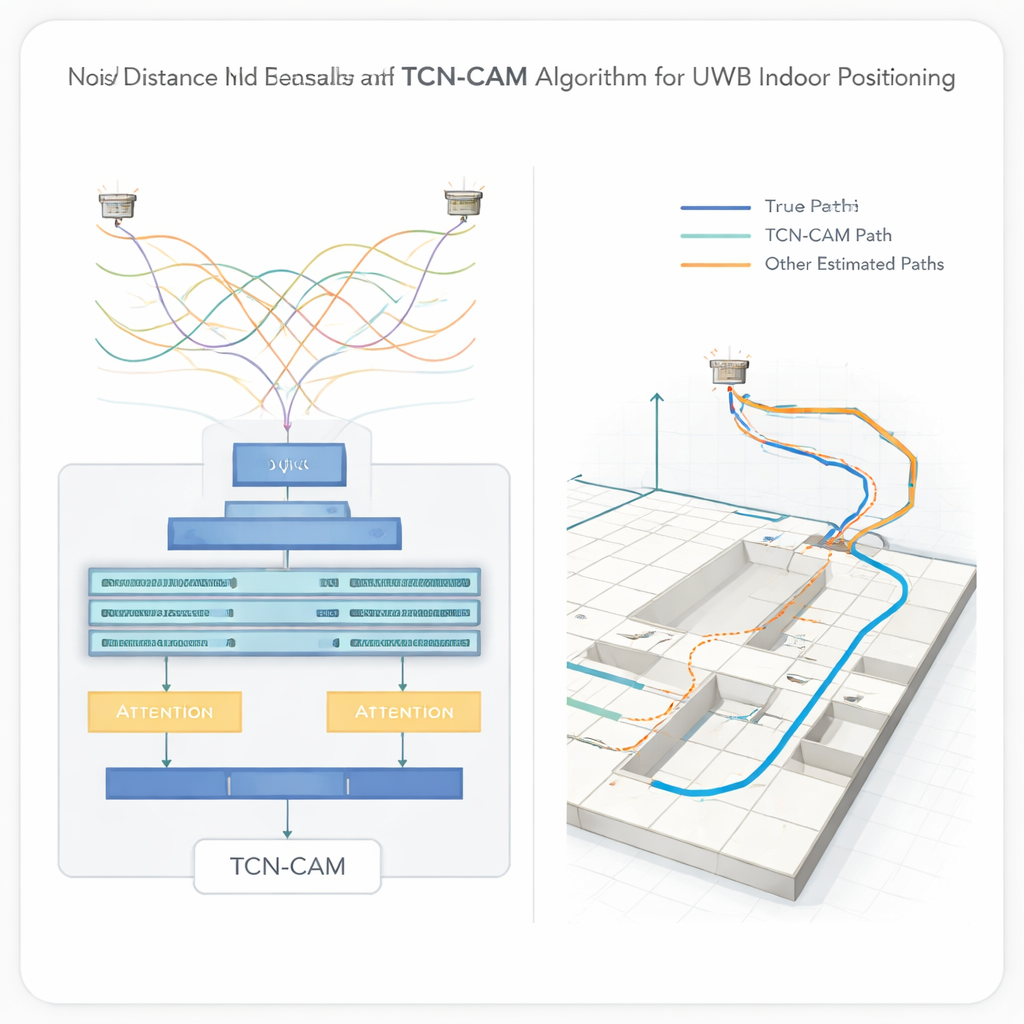
Yöntemin ne kadar iyi çalıştığını görmek için yazarlar önce binlerce sanal iç mekân konumu oluşturdu ve farklı seviyelerde eklenmiş gürültü ve NLOS hataları ile UWB ölçümlerini simüle ettiler. TCN‑CAM yaklaşımlarını dikkat mekanizmalı uzun kısa süreli bellek (LSTM) ağı, standart bir TCN ve kanal dikkatli bir konvolüsyonel ağ olmak üzere üç rakiple karşılaştırdılar. Simüle edilmiş girişimler güçlendikçe tüm yöntemlerde hatalar arttı, ancak TCN‑CAM tutarlı şekilde en küçük hataları ve sonuçlarda en dar dağılımı üretti; bu da hem daha yüksek doğruluk hem de daha büyük güvenilirlik gösteriyordu. En sert test koşullarında, ortalama konum hatalarını diğer yöntemlere kıyasla yaklaşık dörtte bir ila yarı oranında azalttı.
Laboratuvardan Gerçek Dünyadaki Hareketlere
Ekip daha sonra altı UWB baz istasyonu, yüksek hassasiyetli bir ölçüm cihazı ve sinyal kesintilerine kasıtlı olarak neden olmak üzere etrafta yürüyen insanlar ile donatılmış gerçek bir iç mekân test sahasına geçti. Yeni algoritma hareket eden etiketi ortalama sadece 3,32 santimetre hata ile konumlandırdı. Bu, düz bir TCN’den yaklaşık %19 daha iyi, konvolüsyon artı dikkat modelinden %25 daha iyi ve LSTM tabanlı yaklaşıma göre etkileyici bir şekilde %76 daha iyiydi. TCN‑CAM sonuçları sadece gerçek yol etrafında daha sıkı kümelenmekle kalmadı, aynı zamanda etiketin üç boyutlu yörüngesini her yönde daha sadık şekilde izledi.
Günlük Teknoloji İçin Bunun Anlamı
Uzman olmayanlar için çıkarılacak ders basit: akıllı bir modelin UWB mesafe okumalarının zaman içindeki değişimini izlemesine ve her anda hangi sinyallere güvenileceğini öğrenmesine izin vererek, iç mekân konumlandırması insanlar etrafta dolaşıp radyo yolunu engellese bile çok daha hassas ve daha az sıçramalı hale gelebilir. Sabit baz istasyonları taşındığında yöntemin yeniden eğitilmesi gerekse de, altyapının sabit kaldığı fabrikalar, hastaneler, depolar ve akıllı binalar için güçlü ve pratik bir çözüm sunar. Benzer derin öğrenme teknikleri olgunlaşıp UWB’yi diğer sensörlerle birleştirmeye başladıkça, iç mekân cihazları yakında dışarıda telefonunuzun konumunu bildiği kadar güvenilir biçimde kendi konumlarını bilebilir hale gelebilir.
Atıf: He, L., Lian, Z., Núñez-Andrés, M.A. et al. Application of a temporal convolutional network algorithm fused with channel attention module for UWB indoor positioning. Sci Rep 16, 6305 (2026). https://doi.org/10.1038/s41598-026-35802-0
Anahtar kelimeler: iç mekân konumlandırma, ultra geniş bant, derin öğrenme, zaman serisi analizi, konum izleme