Clear Sky Science · tr
YOLO11-WLBS: yol kaplama kusuru tespiti için verimli bir model
Neden daha iyi yol denetimleri önem taşıyor
Yoldaki her çatlak ve çukur yalnızca göze rahatsız edici gelmez—kaplamanın ömrünü kısaltabilir, araçlara zarar verebilir ve kazalara yol açabilir. Bugün birçok yol hâlâ yavaşça araçlarla geçilerek notlar alınarak ya da basit kameralarla denetleniyor; bu yöntemler zaman alıcı, maliyetli ve hataya açıktır. Bu çalışma, akıllı, hafif bir bilgisayarla görme sistemi olan YOLO11‑WLBS’yi tanıtıyor: akıllı telefonlarda veya dronlarda bile gerçek zamanlı olarak farklı yol hasarı türlerini tespit edebilen bir model; yol ağlarımızın daha hızlı ve güvenli bakım sözü veriyor.
Yavaş devriyelerden akıllı kameralara
Trafik arttıkça ve yol ağları genişledikçe, enine ve boyuna çatlaklar, "timsah çatlağı" (alligator cracking), eğik çatlaklar, çukurlar ve yamalar gibi kusurlar daha sık görülüyor. Geleneksel denetimler—yürüyerek veya araçla yapılan incelemeler ya da basit görüntü işleme—insan yargısına çok bağımlı olup kötü aydınlatma veya karmaşık sahnelerde zorlanıyor. Son on yılda derin öğrenme ve özellikle YOLO ailesi nesne tespiti ağları, ham görüntülerden desenleri doğrudan öğrenerek görüntü analizini dönüştürdü. Önceki YOLO tabanlı kaplama sistemleri doğruluğu artırdı ama yine de temel bir ödünleşme ile karşılaştı: yeterince doğru modeller genellikle dronlar, araçlar veya elde taşınan cihazlar için gerçek zamanlı kullanımda çok büyük ve yavaştı.
YOLO11 üzerine ayarlanmış bir motor
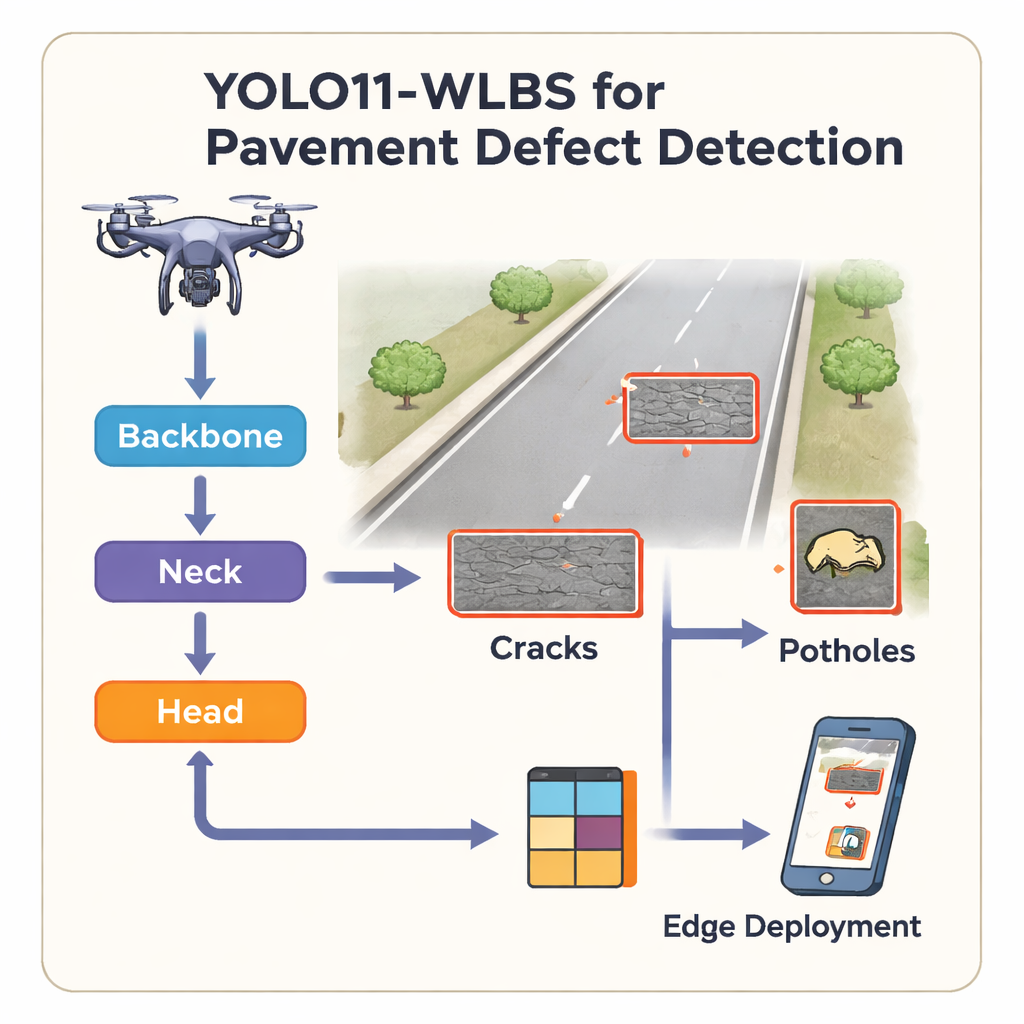
Yazarlar, hız ve doğruluk arasında zaten denge kurmuş modern bir nesne tespiti ağı olan YOLO11’den yola çıkıyor ve bunu yol yüzeylerinin özel zorluklarına uyarlıyor. Geliştirilmiş modelleri YOLO11‑WLBS, geleneksel üç aşamalı tasarımı—özellik çıkarımı için "backbone", farklı ölçeklerde bilgiyi birleştiren "neck" ve kusurlar etrafında kutu ve etiket çizen "head"—koruyor, fakat dört dikkatle seçilmiş yükseltme ekliyor. Bu eklemeler birlikte modelin ince çatlaklara karşı duyarlılığını artırıyor, farklı boyuttaki kusurları daha iyi ele almasını sağlıyor ve gereksiz hesaplamayı kısaltarak uç cihazlarda verimli çalışmasına olanak tanıyor.
Çatlakları görmek için dört akıllı hile
İlk yükseltme, çatlakları ve küçük delikleri çevreleyen parlaklık değişimlerini vurgulamak için dalgacık (wavelet) tabanlı konvolüsyon kullanır; bu, modeli şişirmeden yüksek frekanslı ayrıntıları ön plana çıkarır. Bu sayede standart filtrelerin kaçırabileceği sönük, ince veya düzensiz kusurlar fark edilebilir. Ardından, "hafif uyarlanabilir çıkarım" adımı, özellik haritalarını yeniden düzenleyerek ağın en bilgilendirici kanallara odaklanmasını sağlarken toplam parametre sayısını yaklaşık dörtte bir oranında azaltır. İki yönlü bir özellik piramidi, kaba ve ince ölçekler arasında bilgi akışını yukarı ve aşağı yönlü olarak sağlar; bu, hem küçük çatlaklar hem de daha büyük, birbirine bağlı çatlak desenlerinin tanınmasını geliştirir. Son olarak, basit bir dikkat mekanizması her özellik haritasındaki en önemli bölgeleri ön plana çıkarır; dedektörü şerit işaretleri, gölgeler veya lekeler gibi dikkat dağıtıcı unsurlardan uzaklaştırıp gerçek kusurlara yönlendirir.
Bunu gerçek dünyada kanıtlamak
YOLO11‑WLBS’yi test etmek için ekip, gerçek kaplamaların yüksek çözünürlüklü drone görüntüleri üzerinde eğitti ve değerlendirdi; altı kategoride on binden fazla etiketli kusuru kapsıyor. Orijinal YOLO11 ile karşılaştırıldığında yeni modelin kesinliği 0.853’ten 0.947’ye, duyarlılığı ise 0.698’den 0.895’e yükseldi; bu, daha az yanlış alarm verdiği ve çok daha az kusur kaçırdığı anlamına geliyor. Genel tespit puanı (mAP@0.5) %12.2 artarken parametre sayısı yaklaşık %25.5 azaldı. Sistem düşük ve yüksek aydınlatmada, görüntüler bulanık veya yeniden örneklenmiş olduğunda da doğru kalmaya devam ediyor ve farklı bakış açılarına ve daha düşük çözünürlüğe sahip ayrı bir drone veri kümesine iyi şekilde aktarılıyor. Yazarlar ayrıca tam kantize bir sürümü Android akıllı telefona dağıtarak çoklu çatlak türlerinin canlı video tespitinde saniyede yaklaşık 30 kareye yakın performans elde ediyorlar.
Sürücüler ve şehirler için anlamı
Basitçe söylemek gerekirse, YOLO11‑WLBS yollarımız için daha hızlı, daha keskin bir çift gözdür. Daha iyi kenar algılama, model kapasitesinin daha akıllı kullanımı, çok ölçekli özellik birleşimi ve hafif dikkat mekanizmasını birleştirerek, mütevazı donanımlarda—dronlar ve telefonlar gibi—daha fazla kusuru bulur. Bu, uzun yol bölümlerinin sık sık taranmasını, sorunların erken tespit edilmesini ve onarımların daha verimli planlanmasını pratik hale getirir; bunun için büyük ekipleri trafiğe göndermeye gerek kalmaz. Model nadir görülen kusullar, örneğin çukurlarla ilgili olarak hâlâ biraz zorlanıyor—çoğunlukla öğrenilecek daha az örnek olduğu için—ancak hasarın nerede olduğunu tespit etmenin ötesine geçen ve hasarın şiddetini de tahmin eden gelecekteki sistemler için sağlam bir temel sunuyor; bu da şehirleri daha güvenli ve maliyet‑etkin bakıma yönlendirir.
Atıf: Lin, J., Wang, P., Ruan, Y. et al. YOLO11-WLBS: an efficient model for pavement defect detection. Sci Rep 16, 5284 (2026). https://doi.org/10.1038/s41598-026-35743-8
Anahtar kelimeler: kaplama kusuru tespiti, yol çatlağı tespiti, YOLO11-WLBS, insansız hava aracı denetimi, uç kenarı AI