Clear Sky Science · tr
Okyanus derinliklerini keşfetmek: IoT ve toplu derin hibrit öğrenme modeli ile gizli hazineleri açığa çıkarmak
Deniz tabanını keşfetmenin neden yüksek teknolojiye taşındığı
Derin okyanus ve altındaki zemin kabloları, boru hatlarını, antik kalıntıları ve hassas ekosistemleri saklar. Ancak bulanık su, dönen kum ve zayıf sinyaller orada ne olduğunu görmekte şaşırtıcı derecede zorluk çıkarır. Bu makale, su altı robotlarının ve izleme sistemlerinin önemli nesneleri daha doğru, daha hızlı ve daha az enerjiyle tespit edebilmesi için birçok sensör türünü yapay zekâ ile birleştirmenin yeni bir yolunu anlatıyor. Bu çalışma deniz yaşamını korumaya, altyapıyı güvence altına almaya ve keşifte yeni ufuklar açmaya yardımcı olabilir.
Çok sayıda sensör, derinlik için ortak bir resim
Günümüzün su altı tespit donanımları genellikle tek bir duyguya dayanır: bir sonar ping’i, bir video kamera veya tek tip bir zemin sensörü. Her biri ideal koşullarda iyi çalışır, ama su bulanıklaştığında, ışık azaldığında veya gürültü arttığında başarısız olurlar. Araştırmacılar bunun yerine okyanusu bir Nesnelerin İnterneti tarafından gözlenen bir yer olarak tasavvur ediyor: dinleyen, bakan ve farklı şekillerde hisseden küçük, ağ bağlantılı cihazlar. Sistemleri kameralar, zemin altı radarları, sismik titreşim sensörleri, termal problar ve elektromanyetik dedektörlerden gelen verileri analiz için tek bir ortak akışta birleştiriyor. Bu bakışları karıştırarak, sistem bir sensör çamur, kabarcıklar veya yansımalar nedeniyle şaşırsa bile nesneyi tanıyabilir. 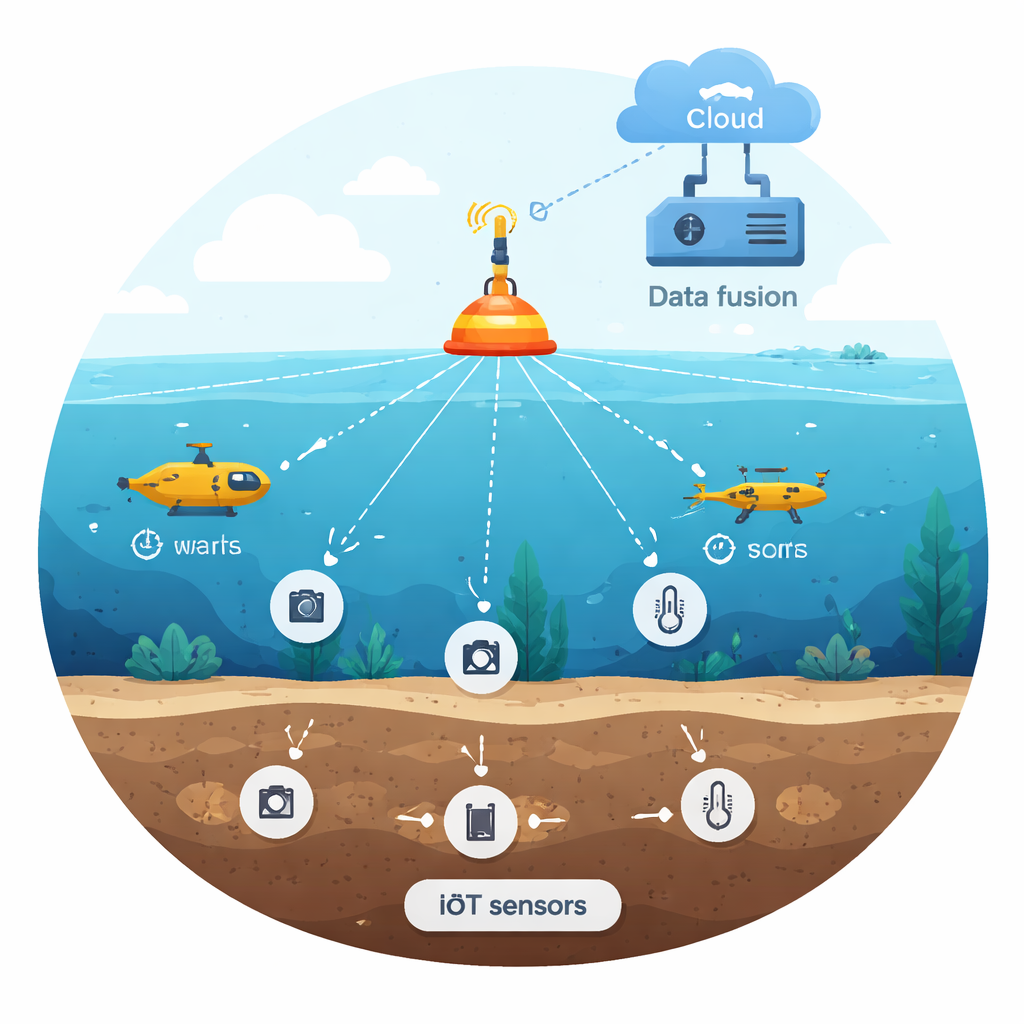
Veriler beyne ulaşmadan önce karışık sinyallerin temizlenmesi
Su altında toplanan ham veriler kusursuzdan uzaktır. Kaymalar, boşluklar ve akıntılar, hareket eden canlılar ve elektronik enterferans nedeniyle rastgele sıçramalar ve garip okumalarla lekelenmiş olur. Herhangi bir akıllı algoritma karar vermeden önce yazarlar bu verileri dikkatli bir temizleme hattından geçirir. Gerçek özellikleri bulanıklaştırmadan ani gürültüleri yumuşatmak için medyan filtreler, aykırı değerleri tespit edip kaldırmak için istatistiksel kontroller ve farklı cihazlardan gelen okumaların zaman içinde hizalanması için senkronizasyon kullanırlar. Ayrıca bir güçlü sensörün daha zayıf olanları bastırmaması için değerleri yeniden ölçeklendirirler, tek boyutlu radar izlerini görüntülere dönüştürürler ve yüzlerce ölçümü daha küçük, daha bilgilendirici bir kümeye indirmek için modern teknikler kullanırlar. Tüm bunlar, öğrenme sisteminin kaotik bir bulanıklık yerine net bir görüntü görmesi için tasarlanmıştır.
Deseni gören ve karar veren hibrit öğrenme motoru
Yaklaşımın merkezinde yazarların Toplu Derin Hibrit Öğrenme (EDHL) modeli adını verdikleri şey bulunur. Bunun tamamlayıcı rolleri olan iki ana parçası vardır. İlk olarak, Inception tarzı derin bir sinir ağı “gözler” gibi davranır; aynı anda birkaç ölçekte sensör görüntülerini tarayarak bir kablo gibi ince detayları ve bir kaya çıkıntısı gibi daha büyük şekilleri yakalar. Bundan sahnenin zengin sayısal betimlemelerini üretir. İkincisi, gradyan arttırma sınıflandırıcısı “karar komitesi” gibi çalışır. Her biri diğerlerinin hatalarını düzelten birçok küçük karar ağacı inşa ederek hangi nesnenin bulunduğu konusunda doğru cevaba kademeli olarak yakınlaşır. Bir özellik seçimi adımı yalnızca en bilgilendirici sinyalleri seçer; bu, hafızayı düşürür ve son sistemi en önemli olanı atlamadan hızlandırır. 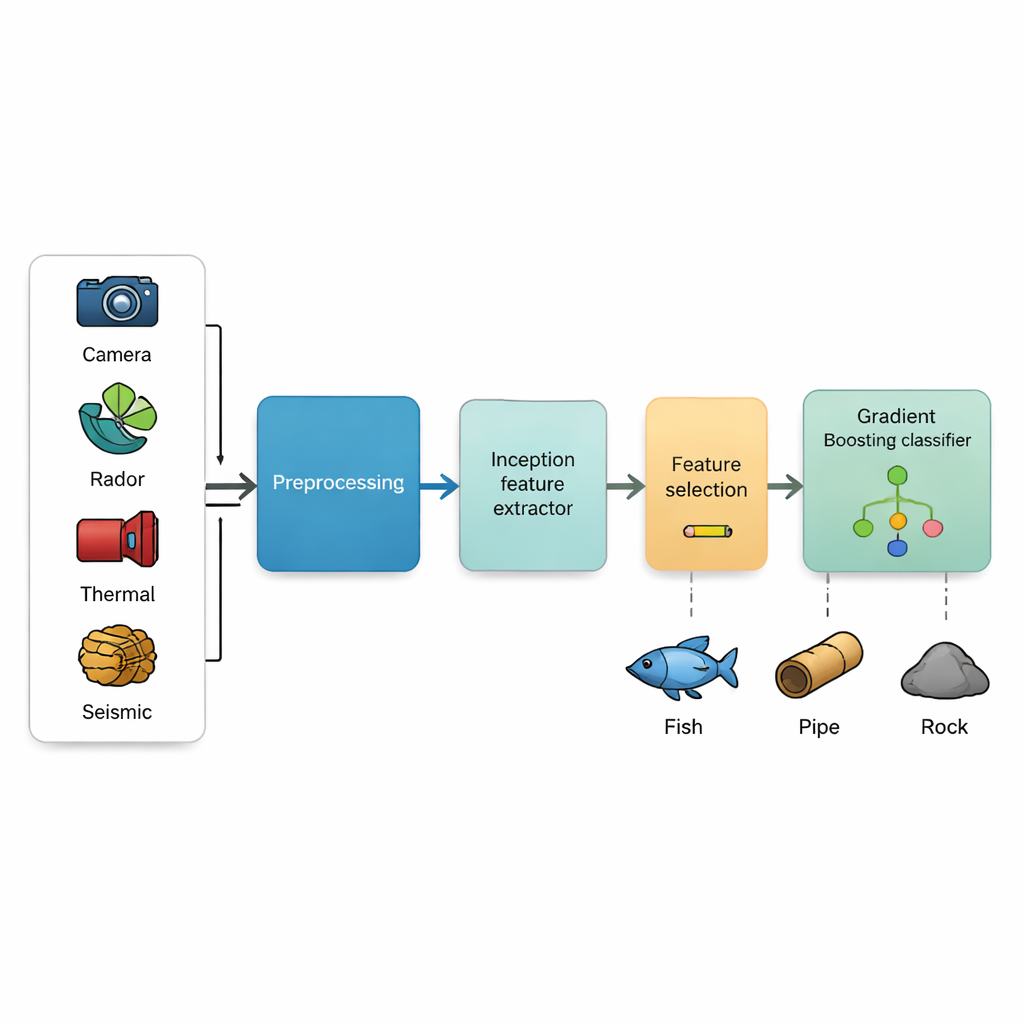
Sistemi teste koymak
Tasarımın pratikte işe yarayıp yaramadığını görmek için ekip, balık, mercan, sünger, deniz yosunu, kabuklar, kabuklular ve diğer deniz tabanı sahnelerini içeren büyük bir halka açık su altı görüntü koleksiyonunu kullanarak modeli eğitip değerlendirdi. Veri temizleme ve özellik seçiminin birçok varyasyonunu karşılaştırdılar ve modellerini klasik konvolüsyonel ağlar, ResNet, DenseNet, EfficientNet, kapsül ağları ve hatta dönüştürücü tabanlı modeller gibi iyi bilinen derin öğrenme sistemleriyle kıyasladılar. EDHL düzeni, özellikle dikkatli gürültü giderme ve korelasyon tabanlı özellik seçimi ile eşleştirildiğinde, rakiplerine kıyasla çok daha az yanlış alarm ve kaçırılan nesneyle %98’in üzerinde bir doğruluk seviyesine ulaştı. Önemli olarak, bu yüksek performansı sadece güçlü laboratuvar sunucularında değil, uç cihazlarda kullanılabilecek benzer mütevazı donanım üzerinde de korudu.
Gelecekteki okyanus keşfi için ne anlama geliyor
Uzman olmayanlar için çıkarım, yazarların su altı dünyası için daha akıllı bir “hisset ve düşün” sistemi inşa etmiş olmalarıdır. Çeşitli IoT sensörlerini hibrit bir öğrenme motoruyla birleştirerek, deniz tabanı nesnelerini ağır bilgisayarlara veya kusursuz görüntüleme koşullarına ihtiyaç duymadan çok güvenilir şekilde tespit edip sınıflandırmanın mümkün olduğunu gösteriyorlar. Gelecekte bu tür bir teknoloji, su altı robot filolarının deniz tabanını haritalamasına, hassas habitatları izlemesine, kirliliği takip etmesine ve gömülü altyapıyı daha az hata ve daha düşük enerji kullanımıyla denetlemesine yardımcı olabilir. Bu, derinlerin karışık ve zorlu ortamını dijital duyuların sonunda gizli hazinelerini açığa çıkaracak kadar net görmeye dönüştürüyor.
Atıf: Tada, S., Jeevanantham, V. Exploring oceanic depths: unveiling hidden treasures with IoT and ensembled deep hybrid learning model. Sci Rep 16, 5333 (2026). https://doi.org/10.1038/s41598-026-35634-y
Anahtar kelimeler: sualtı nesne tespiti, IoT sensörleri, derin öğrenme, deniz keşfi, çok modlu algılama