Clear Sky Science · tr
CRFusion: BEV harita oluşturmada yeni bir LiDAR-kamera füzyon ağı
Sürücüsüz Araçlar için Daha Akıllı Dijital Haritalar
Bir sürücüsüz araç için önündeki yolu anlamak, sürekli değişen bir haritayı okumaya benzer. Araç, gece olsalar da, yağmur yağsa da veya görüşü engelleyecek bir şey olsa da şeritlerin, yaya geçitlerinin ve yol kenarlarının tam olarak nerede olduğunu bilmek zorundadır. Bu makale, şehir sokaklarının daha temiz ve güvenilir kuşbakışı haritalarını oluşturmak için lazer tarayıcıları ve kameraları birleştiren yeni bir sistem olan CRFusion’ı tanıtıyor; bu da otonom araçların şeritlerinde kalmasına ve insanlardan kaçınmasına daha yüksek güven sağlar.
Neden İki “Elektronik Göz” Birinden Daha İyidir
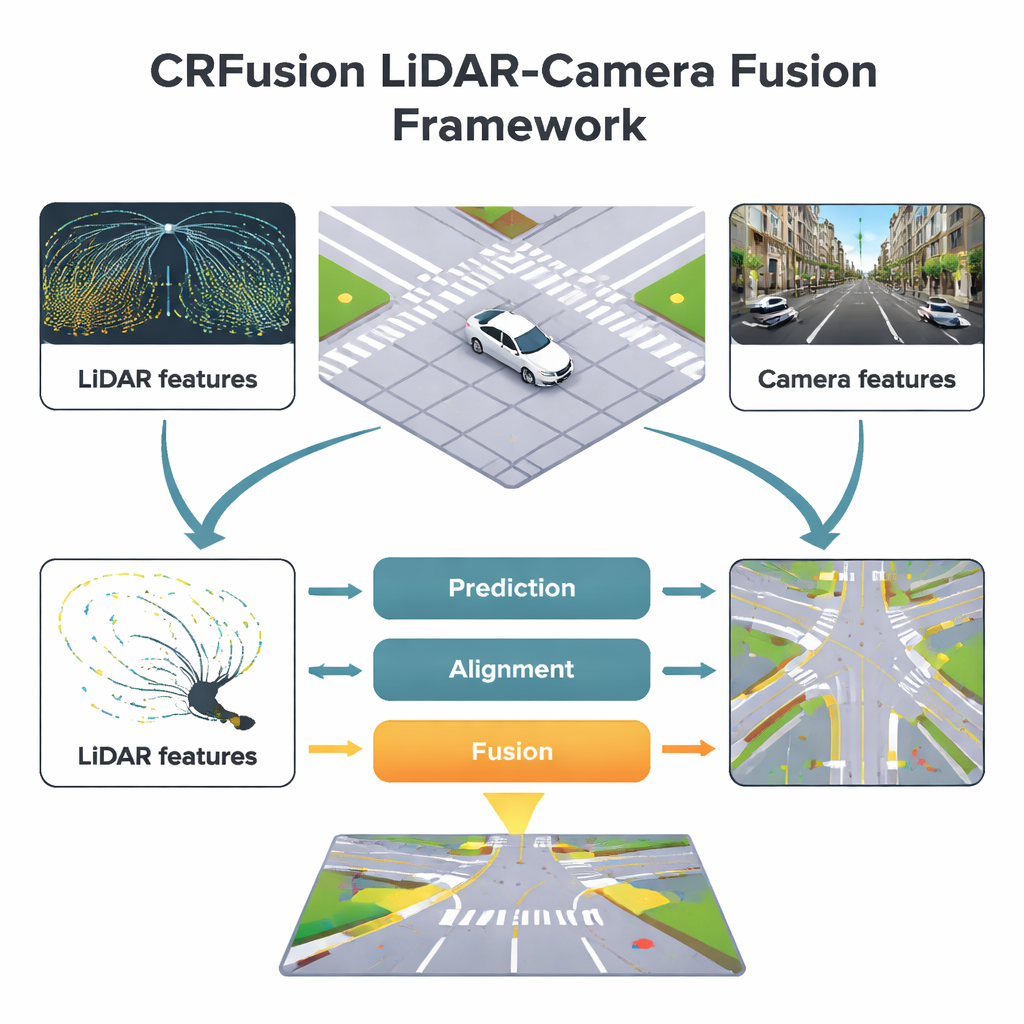
Günümüz sürücüsüz araçları iki ana sensöre büyük ölçüde dayanır. Kameralar zengin renkli görüntüler yakalar; bu da şerit boyasını, trafik işaretlerini ve uzaktaki yaya geçitlerini tespit etmeyi kolaylaştırır. LiDAR ya da lazer tarayıcılar ışık darbaları gönderir ve geri dönüşleri ölçerek aracın çevresinin doğru bir 3B uzaklık ve şekil resmini oluşturur. Her birinin zayıf yönleri vardır: kamera görüntüleri kötü aydınlatma veya kötü hava koşullarından etkilenebilirken, LiDAR ölçümleri mesafe arttıkça seyrek ve eksikleşir. CRFusion bu güçlü ve zayıf yönleri tek bir kuşbakışı görünümde birleştirmek üzere tasarlanmıştır; burada her piksel küçük bir zemin parçasını temsil eder ve şerit, ayırıcı veya yaya geçidi olarak etiketlenir.
Uzun Menzilli Görüşteki Boşlukları Doldurmak
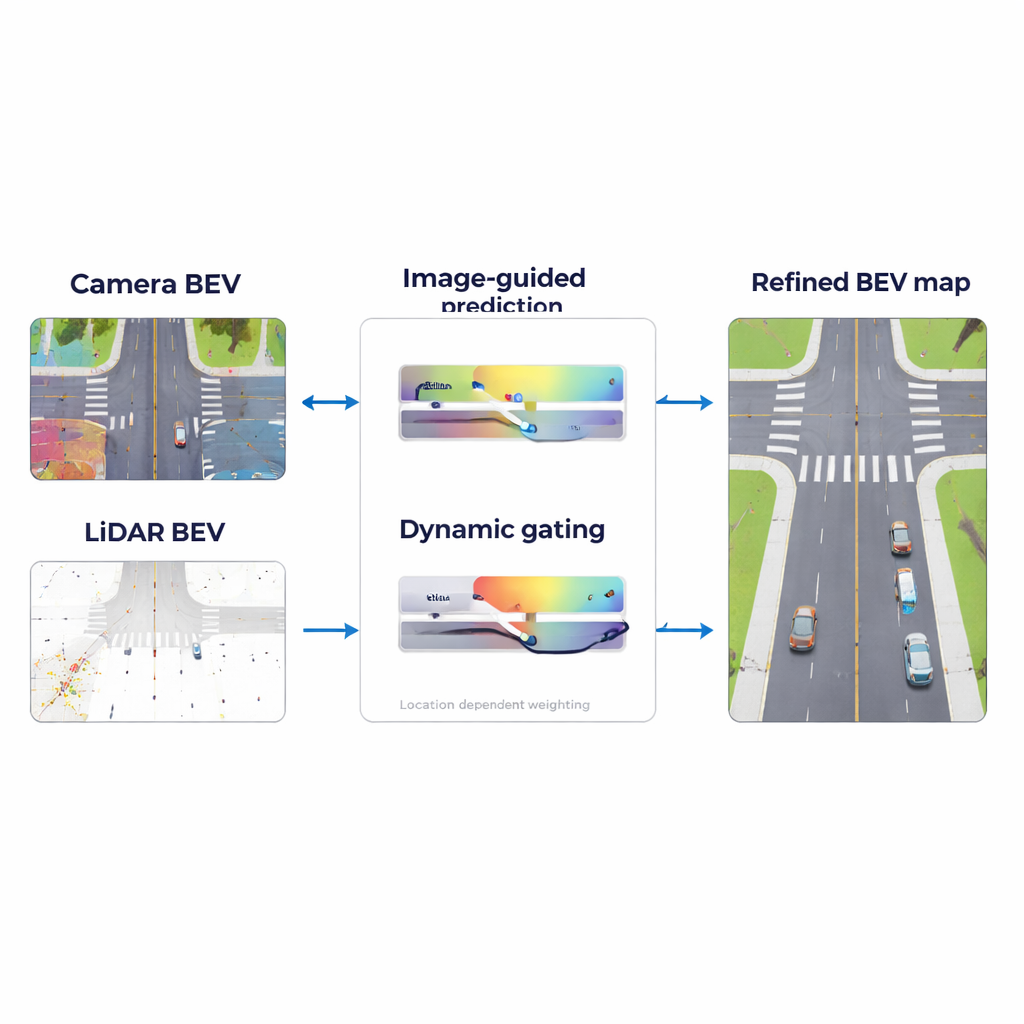
Yol haritalamada temel bir zorluk, LiDAR’ın genellikle araçtan uzak bölgelerdeki ayrıntıları kaçırmasıdır; oysa ileri planlama açısından bu noktalar en önemli olanlardır. CRFusion bunu bir “LiDAR Menzil Tahmincisi” ile ele alır. Basitçe söylemek gerekirse, sistem kameranın uzakta gördüklerine bakar ve LiDAR yoğun ve eksiksiz olsaydı ne ölçerdi diye tahminde bulunur. Dikkat (attention) adı verilen bir mekanizma, modelin kameranın hangi kısımlarının LiDAR tabanlı haritadaki boş veya belirsiz bölgeleri en iyi açıkladığını seçmesine yardımcı olur. Ardından bu tahmini, haritadaki yakın bölgeleri kıyaslayarak iyileştirir; sürekli şerit çizgileri gibi tutarlı desenleri güçlendirir ve rastgele gürültüyü azaltır.
Sensörleri Aynı Görüntüde Uzlaştırmak
Kamera ve LiDAR her ikisi de çalışıyor olsa bile, verileri mükemmel şekilde örtüşmez. Mesafe tahminlerindeki veya sensör yerleşimindeki küçük hatalar, kameranın gördüğü şerit işaretlerinin LiDAR okumalarına göre hafifçe kaymış görünmesine neden olabilir. CRFusion, kameranın kuşbakışı özelliklerini LiDAR görünümüyle daha iyi eşleşecek şekilde nazikçe “çarpıtan” (warp) bir hizalama adımı getirir. Bu, kameranın haritasındaki her noktanın nasıl kaydırılması gerektiğini tahmin eden hafif bir düzeltme ağı kullanılarak yapılır. Sonuç olarak, iki sensör görünümü aynı fiziksel yol pozisyonlarını tanımlar ve sonraki füzyon çok daha güvenilir hale gelir.
Gündüz, Gece ve Kötü Hava Koşullarına Uyum
İki sensör görünümü hizalandıktan sonra sistemin her konumda hangisine ne kadar güveneceğine karar vermesi gerekir. Net şerit boyası olan güneşli bir otoyol, kalabalık bir şehirde yağmurlu bir geceyle çok farklıdır. CRFusion bunu, kamera ve LiDAR özelliklerine harita genelinde esnek ağırlıklar atayan “Dinamik Geçitli Füzyon” (Dynamic Gated Fusion) modülü ile çözer. LiDAR dönüşlerinin güçlü olduğu, yakın yol kenarları veya katı nesneler gibi bölgelerde sistem daha çok LiDAR’a dayanır. Görsel ipuçlarının daha belirgin olduğu, örneğin uzaktaki parlak yaya geçidi şeritlerinde ise kameraya daha fazla güvenir. Bu ağırlıklar veriden otomatik olarak öğrenilir; böylece füzyon stratejisi koşullar değiştikçe akıcı bir şekilde kayar.
Gerçek Dünya Verilerinde Yararı Kanıtlamak
Araştırmacılar CRFusion’ı farklı şehirlerde, hava koşullarında ve günün farklı zamanlarında birçok sürüş sahnesi içeren yaygın kullanılan NuScenes adlı otonom sürüş veri kümesi üzerinde test ettiler. Öncül yöntemlerle karşılaştırıldığında, CRFusion orta ve uzun mesafelerde (90 metreye kadar) özellikle daha doğru şerit sınırları, ayırıcılar ve yaya geçitleri üretti. Hem yer gerçeği haritalarla örtüşme açısından hem de bireysel şerit segmentlerini tespit etme yeteneğinde standart kalite ölçütlerini iyileştirdi ve yapılan bir “ablation” çalışması uzun menzil tahmini, hizalama ağı ve dinamik füzyon gibi her bir ana bileşenin anlamlı katkılar sağladığını gösterdi. Görsel örnekler daha düzgün şerit sürekliliği ve daha belirgin yaya geçitleri ortaya koydu; bu da sistemin haritalarının daha özenle çizilmiş yol planlarına benzediğini doğruladı.
Günlük Sürüş için Anlamı
Uzman olmayanlar için ana çıkarım şudur: CRFusion, kameraların ve LiDAR’ın daha akıllıca “konuşmasını” sağlayarak sürücüsüz araçların daha temiz ve daha güvenilir sokak haritaları oluşturmasına yardımcı olur. Kamera görüntülerinden eksik LiDAR bilgisini tahmin ederek, iki sensör perspektifini hizalayarak ve duruma göre her birine ne kadar güvenileceğini ayarlayarak sistem kör noktaları ve tahminleri azaltır. Bu, otonom araçları iyi işaretlenmiş şeritleri ve geçitleri izleyen dikkatli bir insan sürücü kadar güvenle karmaşık, dağınık şehir sokaklarıyla başa çıkmaya bir adım daha yaklaştırır.
Atıf: Guan, Y., Wang, T., Cheng, Q. et al. CRFusion: a novel LiDAR-camera fusion network for BEV map construction. Sci Rep 16, 5169 (2026). https://doi.org/10.1038/s41598-026-35551-0
Anahtar kelimeler: otonom sürüş, LiDAR-kamera füzyonu, HD semantik haritalar, kuşbakışı görüş (BEV), kentsel yol haritalama