Clear Sky Science · tr
USB bellekten küçük bir mikrodenetleyici kullanarak makine öğrenimine dayalı nesne algılama ile 6-DoF robot kol kontrolünün tasarımı ve uygulanması
Daha Küçük Bütçeyle Daha Akıllı Robot Kollar
Bir fabrikada, nesneyi fark eden, nasıl kavrayacağına karar veren ve ağır bir bilgisayar ya da bulut bağlantısına ihtiyaç duymadan düzgün şekilde yerine getiren bir robot kol hayal edin. Bu makale tam olarak bunu anlatıyor: küçük, düşük maliyetli bir mikrodenetleyici kullanarak gören ve düşünen altı eklemli (6-DoF) bir robot kol. Yapay zekânın veri merkezlerinden çıkarak günlük makinelere nasıl taşındığını merak eden okuyucular için, bu çalışma gelişmiş görme ve kontrolün bir USB belleğinden fazla olmayan donanımda nasıl çalıştırılabileceğini gösteriyor.
Robot Beyinlerini Küçültmenin Önemi
Geleneksel endüstriyel robotlar genellikle nesneleri tanımak ve hareket planlamak için güçlü dış bilgisayarlara bağımlıdır. Bu durum maliyet, kablolama ve teknik karmaşıklık ekler; küçük ve orta ölçekli işletmeler için engel oluşturabilir. Yazarlar, tek bir düşük maliyetli mikrodenetleyicinin neredeyse her şeyi yapabileceğini kanıtlamayı amaçladı: nesneleri görmek, bunların 3B uzaydaki yerini belirlemek, kolun nasıl hareket etmesi gerektiğini planlamak ve görevi gerçekleştiren motorları sürmek. İşlemeyi kart üzerinde tutarak sistem daha taşınabilir, daha enerji verimli ve sıkışık ya da değişen ortamlarda—küçük fabrikalardan öğretim laboratuvarlarına—daha kolay konuşlandırılabilir hale geliyor.
Kendini İnşa Eden Esnek Bir Kol
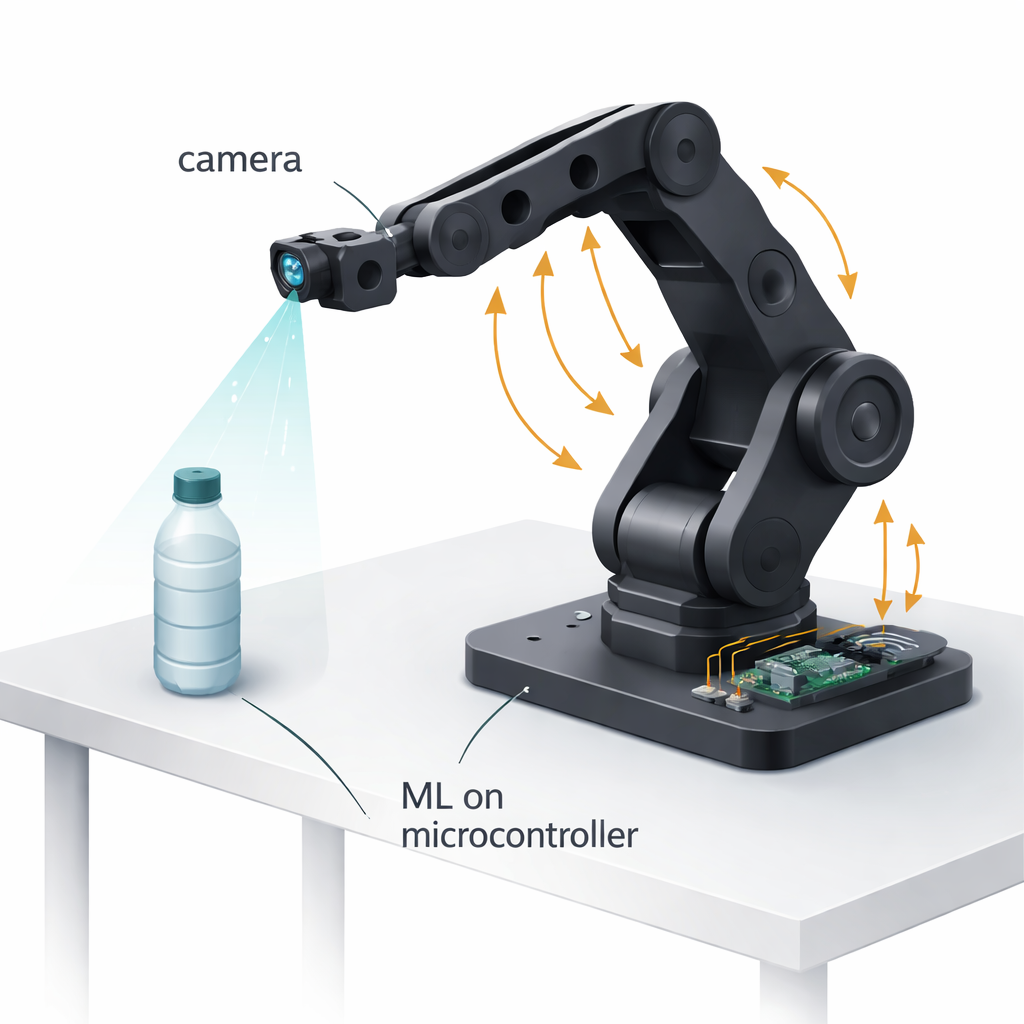
Ekip, kolu hafif ve uygun maliyetli tutmak için çoğunlukla 3D yazdırılmış plastik parçalar kullanarak sıfırdan altı eklemli bir robot kol tasarladı. Her eklemi hareket ettiren yüksek torklu hobi tipi servo motorlar kullanıldı ve araştırmacılar bu motorları gerçek zamanlı olarak açılarının geri okunmasına izin verecek şekilde değiştirdi; böylece hassas kapalı döngü kontrol mümkün oldu. Uçta yer alan özel iki parmaklı tutucu basit bir akım sensörü içeriyor: tutucu motorunun çektiği elektrik akımını izleyerek sistem, ne kadar sıkıştırma uygulandığını çıkarım yapabiliyor ve nesneleri ezmeden ya da düşürmeden sıkıca tutacak şekilde kavramayı otomatik olarak ayarlayabiliyor. Kolun “bileğine” monte edilen küçük bir full-HD kamera, kolla birlikte hareket ederek kavrayıcının önündeki sahnenin birinci şahıs görüntüsünü sağlıyor.
Minik Bir Çipi Şişe Görmesi İçin Eğitmek
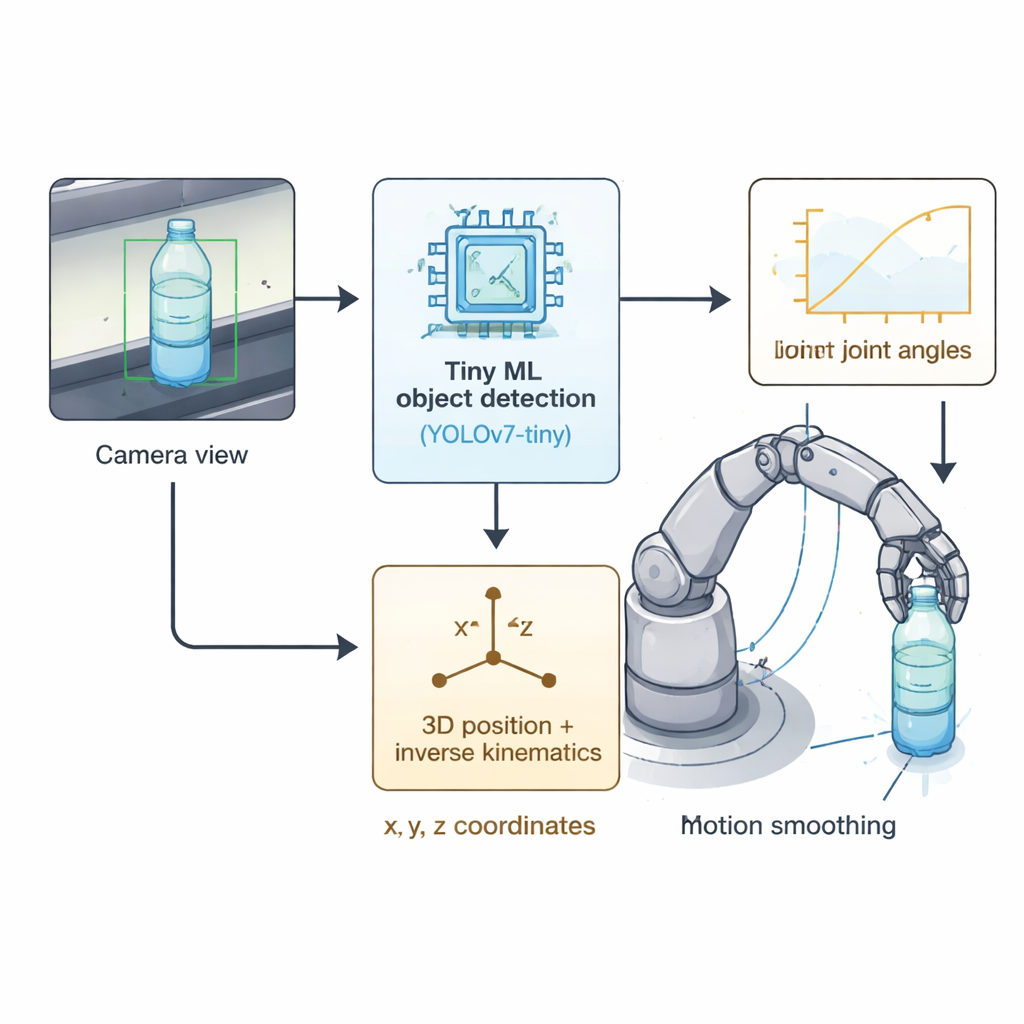
Sistemin görmesinin merkezinde YOLOv7-tiny adlı popüler bir nesne algılama ağının kompakt bir sürümü bulunuyor. Araştırmacılar bu modeli, farklı aydınlatma açıları, mesafeler ve kısmi örtünmeler altında çekilmiş 2.500’den fazla plastik su şişesi görüntüsü üzerinde eğitti. Güçlü bir grafik kartında eğitimden sonra modeli, AMB82-Mini mikrodenetleyicinin sınırlı bellek ve işlem gücüne sığdırmak için 8 bitlik bir "küçük ML" biçimine sıkıştırdılar. Bu inceltilmiş biçimde dahi model şişeleri tespit etmede yaklaşık %88 doğruluk elde etti ve mikrodenetleyici üzerinde doğrudan gerçek zamanlı al-ver işleri için yeterince hızlı—saniyede yaklaşık 7–8 kare—çalıştı; PC veya buluttan yardım gerektirmedi.
Pikselden Hassas Hareketlere
Kamera bir şişeyi tespit ettiğinde, sistem tespit kutusunun görüntüdeki merkezini hesaplayıp nesnenin piksel cinsinden ne kadar büyük göründüğüne dayanarak ne kadar uzak olduğunu tahmin ediyor. Bu, uzaydaki x, y ve z koordinatlarını verir. Özel bir matematiksel çözücü daha sonra bu koordinatları kolun ulaşması gereken altı eklem açısına çevirir; standart robot geometrisi kullanılarak fakat küçük işlemci üzerinde hızlı çalışacak şekilde optimize edilmiştir. Basit bir durum makinesi olarak organize edilen kontrol yazılımı, nesne bulma, ona doğru hareket etme, akım sensörünü bir his aracı olarak kullanarak tutucuyu kapatma ve ardından nesneyi sabit bırakma noktasına taşıma döngüsünü tekrarlar. Hareketleri pürüzsüz tutmak ve titreşimi önlemek için ekip dikkatle şekillendirilmiş hareket “yumuşatma” eğrileri ve motor gürültüsünü ve aşımını azaltan özel bir voltaj modülasyonu yöntemi kullanıyor.
Gerçek Dünya Testleri ve Gösterdikleri
Tekrar edilen deneylerde, entegre sistem plastik şişeleri 300 grama kadar %100 başarı oranıyla güvenilir şekilde alıp yerleştirebildi ve 500 grama kadar daha ağır yüklerde de iyi performans gösterdi. Simülasyonlar ve ölçümler, konumlama hatalarının tipik olarak yaklaşık bir milimetre civarında olduğunu gösterdi—birçok ayırma ve paketleme görevi için yeterli. Daha basit kontrol şemalarına kıyasla yazarların motor kontrol stratejisi titreşimi azalttı, kolun yerleşme süresini kısalttı ve ani, sarsıntılı davranışı ortadan kaldırdı. Testler tek bir nesne türüne ve kontrollü iç mekan mesafelere odaklansa da, ciddi bir robot algılama ve kontrolünün çok mütevazı bir gömülü karta sığabileceğine dair ikna edici kanıt sunuyorlar.
Günlük Otomasyon İçin Ne Anlama Geliyor
Uzman olmayanlar için ana çıkarım, gelişmiş "görme" ve "hareket etme" yeteneklerinin artık pahalı, yüksek güçlü robotlarla sınırlı olmadığıdır. Küçük makine öğrenimi modellerini, akıllı geometrileri ve dikkatli motor kontrolünü düşük maliyetli bir mikrodenetleyicide birleştirerek, bu çalışma küçük üreticilerin, okulların ve meraklıların gerçekçi olarak benimseyebileceği kompakt, kendi içinde çalışan robot kollarına giden bir yol gösteriyor. Gelecek sürümler daha fazla nesne türünü ve daha çeşitli ortamları kapsadıkça, benzer gömülü sistemler sayısız basit alma-bırakma işini sessizce otomatikleştirerek akıllı robotikleri çok daha fazla insanın ve yerin erişimine sokabilir.
Atıf: Almaliki, H.H., Mazinan, A.H. & Modaresi, S.M. Design and implementation of a 6-DoF robot arm control with object detection based on machine learning using mini microcontroller. Sci Rep 16, 6842 (2026). https://doi.org/10.1038/s41598-026-35508-3
Anahtar kelimeler: gömülü robotik, küçük makine öğrenimi, robot kol kontrolü, nesne algılama, endüstriyel otomasyon