Clear Sky Science · tr
Hidrolik ekskavatör kollarında enerji geri kazanımının adaptif kontrolü için Bayesçi pekiştirmeli öğrenme
Neden daha akıllı ekskavatörler önemli
Hidrolik ekskavatörler inşaat ve madenciliğin iş atlarıdır, ancak çok fazla dizel yakar ve motordan çekilen enerjinin büyük kısmını boşa harcarlar. Güç kullanımında yapılacak her iyileştirme, müteahhitler için daha düşük yakıt giderleri ve herkes için daha az emisyon anlamına gelebilir. Bu çalışma, ekskavatör kollarının değişen zemin koşulları ve makine aşınmasını “öne bakarak” tahmin etmelerini sağlayan yeni bir yol araştırıyor; böylece sıkı güvenlik sınırları içinde kalarak enerjiyi daha etkili biçimde geri kazanıp yeniden kullanabilirler.
Kazı yakıtı zorluyor
Modern ekskavatörler genellikle hidrolik sistemlerini, sert kayayı kazıyor veya gevşek toprağı nazikçe düzeltiyor olsalar da yüksek, sabit basınçlarda çalıştırırlar. Bu tek beden herkese uyan yaklaşım makineleri güvenilir tutar ama özellikle hafif işler sırasında ve bom kendi ağırlığıyla inerken enerjiyi ısı olarak boşa harcar. Bazı yeni tasarımlar bu fazla enerjiyi hidrolik akümülatörlerde yakalayabilen cihazlar içerse de, çoğu makine ne zaman ve nasıl kullanılacağına karar vermek için basit, sabit kurallara dayanır. Sonuç, gerekli olandan yüzde 20’ye kadar daha yüksek yakıt tüketimi ve iş sahalarında daha büyük bir karbon ayak izi olur.
Kol için öğrenen bir kontrol sistemi
Yazarlar, silindirleri, pompası, valfleri ve bom aşağı hareket ederken enerjiyi depolayan ve daha sonra kaldırmaya yardımcı olmak için serbest bırakan gaz dolu bir akümülatörü içeren 21 tonluk bir ekskavatör kolunun ayrıntılı bir sanal modelini tasarlarlar. Kontrollerinin pek çok gerçek dünya belirsizliğiyle başa çıkması gerekir: aniden sertleşen veya yumuşayan zemin, sıcaklığa göre koyulaşan veya incelen yağ, yavaşça aşınan bileşenler ve gürültülü ya da hafifçe sapmalı sensörler. Her şeyin bilindiğini ve sabit olduğunu varsaymak yerine sistem, makinenin gerçek durumunu kısmen gizli kabul eder ve Bayesçi yöntemlerle en iyi tahminini sürekli olarak günceller. Bir parçacık filtresi, zeminin ne kadar dirençli olduğu ve akümülatörün tasarım noktasına göre hafifçe fazla mı yoksa az mı dolu olduğu gibi gizli faktörleri tahmin eder. 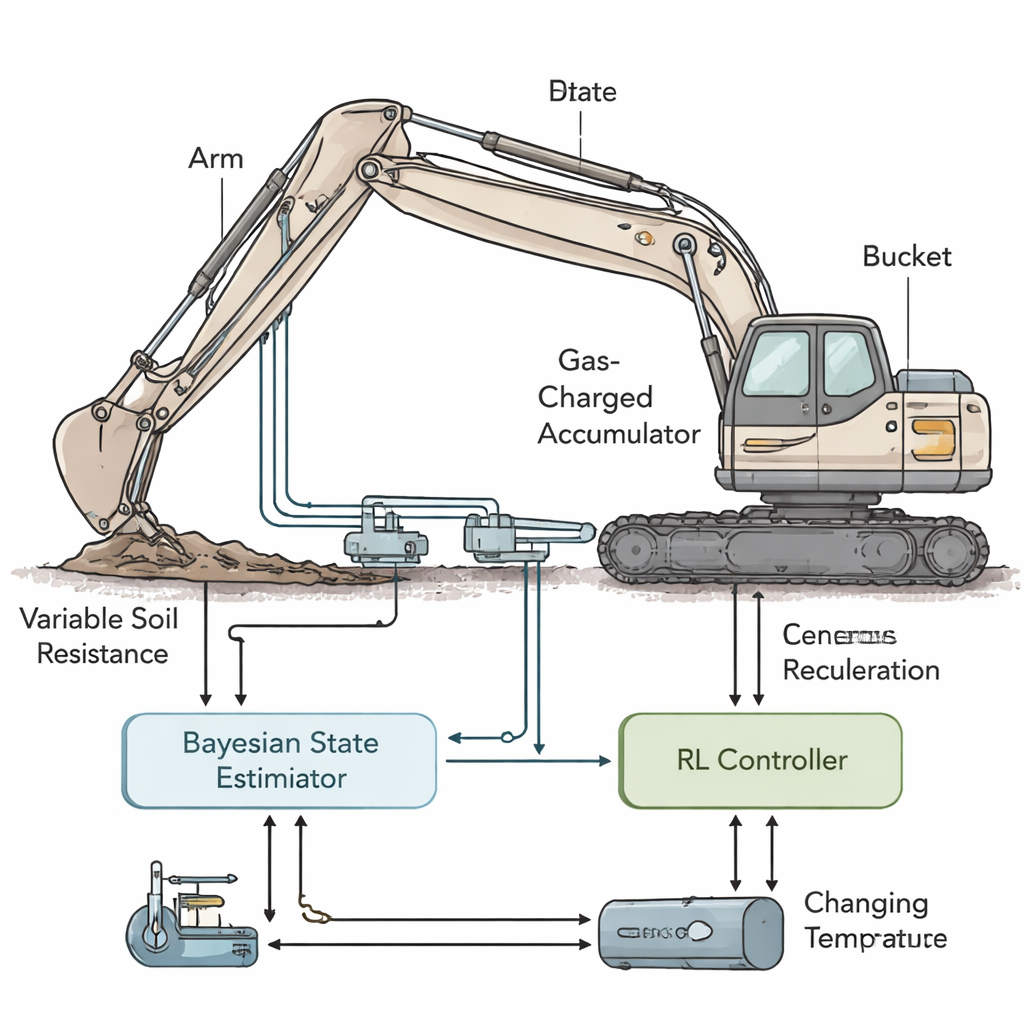
Makinayı güvenli şekilde uyarlamayı öğretmek
Bu durum kestiricisinin üzerine ekip bir pekiştirmeli öğrenme (RL) politikası eğitir; bu algoritma simülasyonda deneye yanılmayla zamanla iyi stratejiler keşfeder. Her an politikaya makinenin durumuna ilişkin güncel “inanç” verilir ve pompa basıncı ile valf açıklıkları için sürekli komutlar seçer. Ardından özel bir güvenlik katmanı bu önerileri kontrol eder ve katı bir güvenli aralığa kırpar: hidrolik basınçlar genel olarak 5 ile 35 megapaskal arasında olmalı, akümülatör 12–28 megapaskal aralığında kalmalı ve valf hareketleri sistemi sarsmayacak şekilde sınırlanmalıdır. Öğrenme süreci denetleyiciyi her kazı döngüsünü hızlı bitirmesi, mümkün olduğunca az hidrolik enerji kullanması ve kovayı hedefte tutması için ödüllendirirken, sistemi güvensiz bölgelere itebilecek eylemleri cezalandırır.
Akıllı denetleyici ne kadar iyi performans gösteriyor
Araştırmacılar, Bayesçi RL denetleyicilerini iki daha geleneksel kurulumla karşılaştırarak saniyede 100 güncelleme hızında kapsamlı eş-simülasyonlar yürütürler: biri sabit parametrelere sahip bir denetleyici, diğeri ise basit manuel basınç ve hız ayarlamaları yapan yetenekli bir operatörü taklit eden bir düzen. Tüm denetleyiciler aynı betimlenmiş 20 dakikalık işi gerçekleştirir; bu işte zemin güçlüğü birkaç aşamada değişir ve yağ soğuktan sıcağa ısınır. Öğrenmeye dayalı denetleyici zemindeki değişiklikleri saniyeler içinde izler, zemin zorlaştığında çevrim sürelerini sabit tutmak için basıncı artırır, kazı kolaylaşınca enerjiyi tasarruf etmek ve akümülatörü şarj etme fırsatları yaratmak için azaltır. Çok sayıda rastgeleleştirilmiş çalışmada, sabit denetleyiciye kıyasla kazı döngüsü başına enerji kullanımını yaklaşık %20–22, operatör ayarlı denetleyiciye göre yaklaşık %14–18 oranında düşürür; aynı zamanda çevrim sürelerini kısaltır ve kovayı hedef pozisyonuna getirmedeki doğruluğu artırır. Basınçların sınırları aşmaya çalışması veya emniyet vanalarının uzun süre açılması gibi güvenlik olayları, sistem performansı daha agresif hale gelmesine rağmen daha nadir hale gelir. 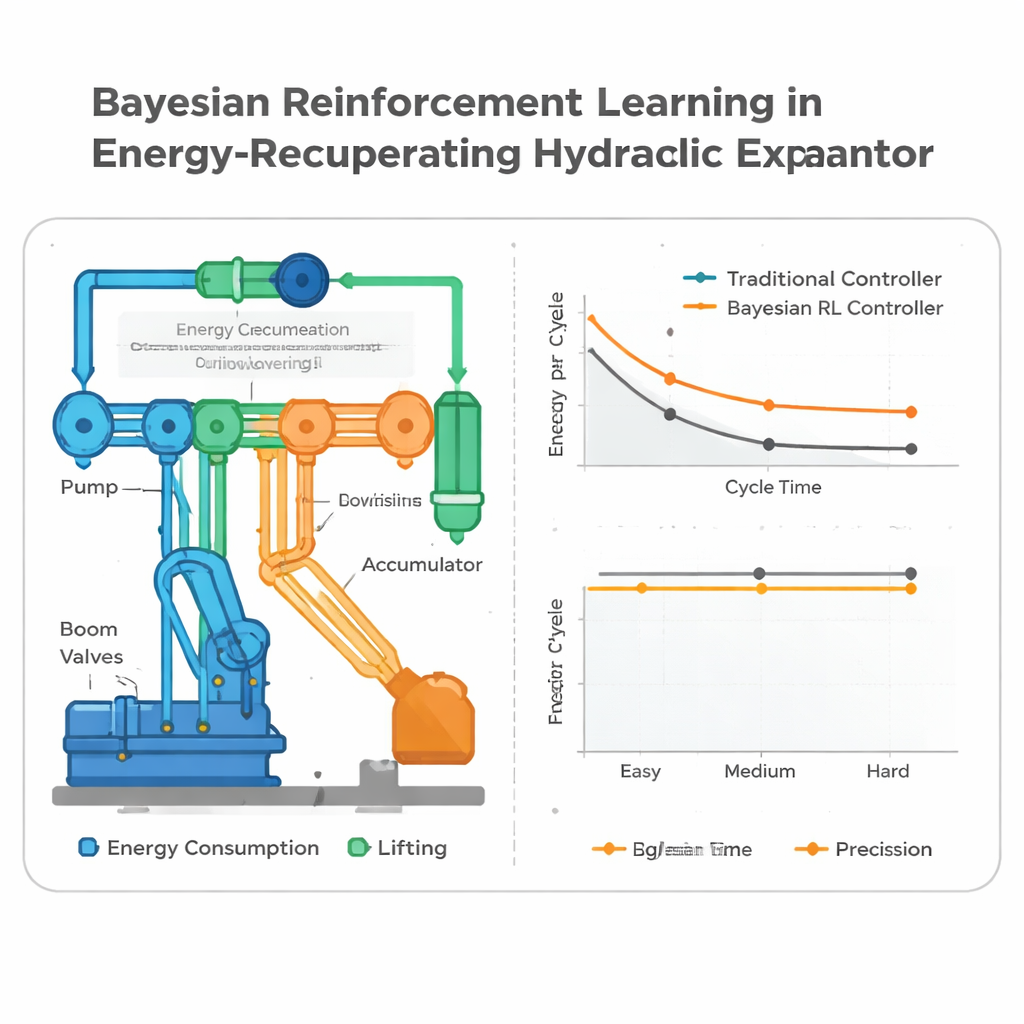
Gerçek makineler için anlamı
Bir okuyucu için temel mesaj, ekskavatör kolunun hem temkinli hem de tutumlu olmayı öğrenebileceğidir. Kazmanın ne kadar zor olduğu, bileşenlerin sağlığı ve akümülatörde ne kadar enerji depolandığı konusundaki anlayışını sürekli güncelleyerek denetleyici, gerçek zamanlı olarak ne zaman enerji biriktirileceğine ve ne zaman verimliliği korumak için biraz fazladan harcanacağına karar verir. Çalışma hâlâ saha denemeleri yerine simülasyonlara dayanıyor ve tek bir makine boyutuna odaklanıyor, ancak olasılıksal akıl yürütmeyi öğrenmeye dayalı kontrolle birleştirmenin ağır ekipmanı güvenlik veya hızdan ödün vermeden önemli ölçüde daha verimli hale getirebileceğini gösteriyor. Benzer yaklaşımlar gerçek ekskavatörlere aktarıldığında, müteahhitlerin aynı miktarda toprağı daha az yakıt, daha az aşınma ve daha düşük emisyonla taşımasına yardımcı olabilirler.
Atıf: Hu, P., Wen, T., Zhang, D. et al. Bayesian reinforcement learning for adaptive control of energy recuperation in hydraulic excavator arms. Sci Rep 16, 6195 (2026). https://doi.org/10.1038/s41598-026-35391-y
Anahtar kelimeler: hidrolik ekskavatör, enerji geri kazanımı, pekiştirmeli öğrenme, Bayesçi kontrol, ağır makine verimliliği