Clear Sky Science · tr
PMSM tabanlı elektrikli araç uygulamaları için yeni bir uyarlamalı nöro-bulanık ve uyarlamalı orantılı rezonant kontrol şeması
Daha Sessiz, Daha Pürüzsüz Elektrikli Sürüşler
Elektrikli otomobiller zaten benzinli araçlardan daha temiz, ancak motorların nasıl kontrol edildiği hâlâ iyileştirme potansiyeli barındırıyor. Gaz pedalına bastığınızda ani sarsıntılar, motordan gelen hafif uğultular ve israf edilen enerji, motorun yol ve trafik koşullarındaki değişikliklere ne kadar hızlı ve düzgün yanıt verebildiğine kadar uzanır. Bu makale, elektrikli araçların daha düzgün hızlanması, daha az enerji harcaması ve gerçek dünya bozucu etkilerle daha iyi başa çıkması için yapay zekâ ile özel bir sinyal şekillendirmenin harmanlanması yoluyla motoru “içten” sürmenin yeni bir yolunu inceliyor.
Gerçek Yollarda Motor Kontrolünün Neden Önemli Olduğu
Modern elektrikli otomobiller genellikle kompakt, verimli ve kalkışta güçlü çekiş sağlayan kalıcı mıknatıslı motorları kullanır. Ancak şehir içi sürüş karmaşıktır: sürücüler trafik ışıklarında durup kalkar, sıkışıklıkta dolanır ve yokuşlar ile değişen yüklerle karşılaşır. Bu koşullar altında motor hızı sürücünün istediğinin üzerine çıkabilir veya geride kalabilir ve şaft üzerindeki burulma kuvvetinde dalgalanmalar oluşabilir. Bu dalgalanmalar titreşim, gürültü ve dişliler ile rulmanlarda ek gerilim olarak ortaya çıkar. Sabit ayarlı geleneksel kontrol devreleri yalnızca dar bir koşul kümesinde iyi çalışır ve yol, sıcaklık veya araç yükü değiştiğinde zorlanabilir.
Daha İyi Hız Kontrolü için Öğrenme ile Kuralların Harmanlanması
Yazarlar, sıradan dış hız kontrol bloğunu uyarlamalı bir nöro-bulanık sistemle — bulanık mantığın eğer–ise kurallarını sinir ağlarının öğrenme yeteneğiyle birleştiren bir kontrolörle — değiştiriyor. Fabrikada elle bir kez ayarlamak yerine bu kontrolör, motor hızının komutlara ve bozucu etkilere nasıl tepki verdiğini örnek verilerden öğrenir. Ham hız hatasını (gerçek hız ile istenen hız arasındaki fark) ve bu hatanın ne kadar hızlı değiştiğini birbirine örtüşen “görüşler” setine çevirir ve bunları hassas bir düzeltme için birleştirir. Eğitim ve test sonuçları, bu öğrenilmiş kontrolörün aşım ve yetersiz tepkileri azaltacak, hedef hıza ulaşma süresini kısaltacak ve sistem doğrusal olmayan ve değişime maruz kaldığında bile davranışı kararlı tutacak ayarları hızla bulduğunu gösteriyor.
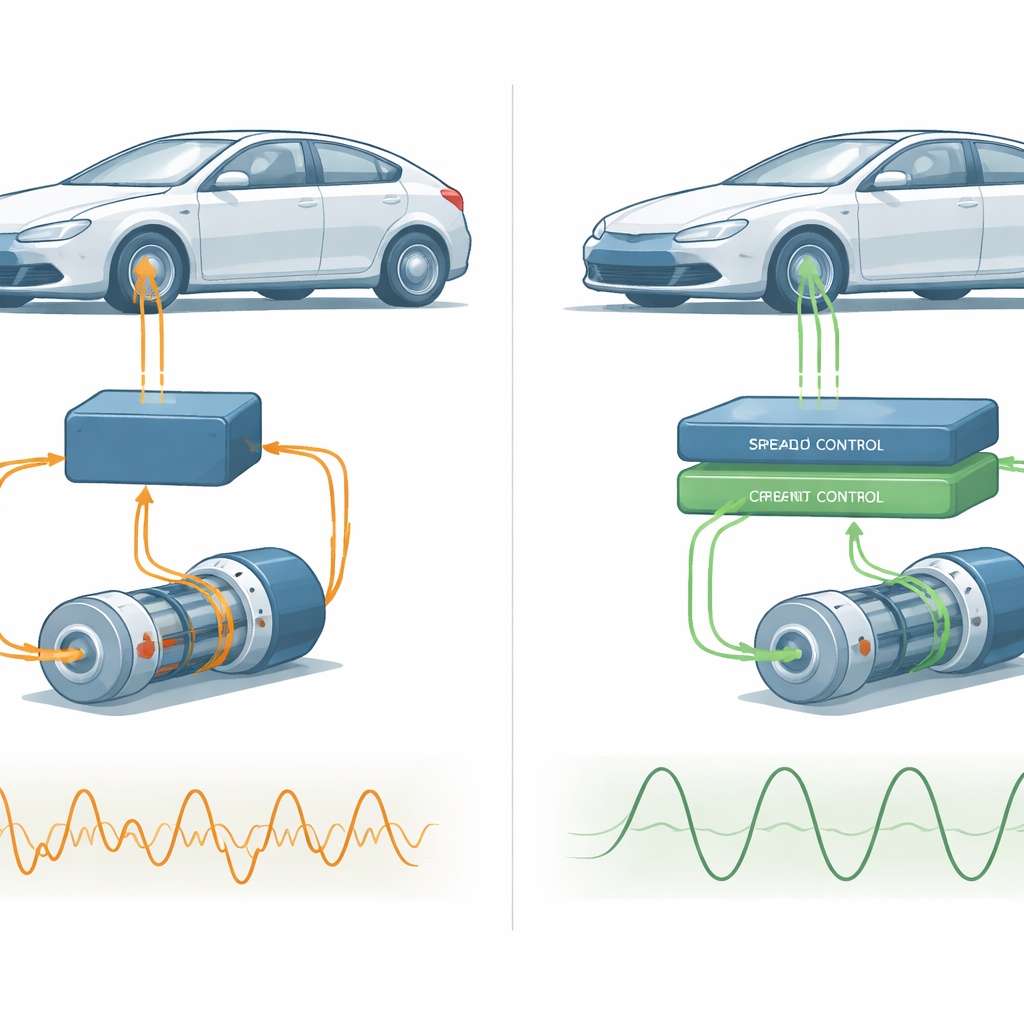
Sakin, Düşük Gürültülü Çalışma İçin Akımın Şekillendirilmesi
Dış döngü motorun ne kadar hızlı döneceğine karar verirken, iç döngü her an bobinlere ne kadar akım akacağını belirler. Burada yazarlar uyarlamalı orantılı rezonant bir kontrolör sunuyor. Sadece hatanın büyüklüğüne tepki vermek yerine bu kontrolör, istenmeyen dalgalanmaların en zararlı olduğu motorun ana alternatif akım frekansındaki akımlara özel dikkat gösterecek şekilde ayarlanıyor. Birkaç ana ayar değeri dikkatle seçilerek, bu temel frekansta çok yüksek düzeltme gücü sağlanırken diğer yerlerde kararsızlıktan kaçınılıyor. Sonuç, neredeyse mükemmel bir sinüs dalgasına çok yakın görünen, aksi takdirde tork dalgalanması ve işitilebilir uğultu olarak ortaya çıkacak keskin dalgalanmalardan çok daha az içeren akımlar elde edilmesi.
Yeni Stratejinin Teste Alınması
Ekip, iki aşamalı tasarımlarını — dış döngüde nöro-bulanık hız kontrolü ve iç döngüde rezonant akım kontrolü — gerçek bir elektrikli araç aktarma organını taklit eden ayrıntılı bilgisayar simülasyonları ve donanım-döngü içinde deneyler yoluyla değerlendiriyor. Bunu konvansiyonel bir orantılı–integral kontrolör, o kontrolörü rezonant bir iç döngü ile eşleştiren bir şema ve bir model önleyici yaklaşım olmak üzere üç yerleşik yöntemle karşılaştırıyorlar. Kalkıştan harekete geçme, yük altında sabit çalışma, sabit yükte hızlı hız değişimleri ve sabit hızda ani yük değişimleri gibi çeşitli senaryolarda yeni şema tutarlı şekilde hedef hıza daha hızlı ulaşıyor, daha küçük tepe ve dips değerleri sergiliyor. Ayrıca tork daha pürüzsüz ve akımlar daha temiz oluyor; motorun direnci ve endüktansı ısı veya sert çevreleri taklit etmek için yapay olarak değiştirildiğinde bile bu performans korunuyor.
Bu, Geleceğin Elektrikli Arabaları İçin Ne Anlama Geliyor
Basitçe söylemek gerekirse, bu hibrit kontrol stratejisi elektrik motorunun sabit bir tarife körü körüne uymak yerine düşünmesine ve uyum sağlamasına izin veriyor. Hız düzeyinde bozucu etkileri reddetmeyi öğrenerek ve motor içindeki akım dalga formlarını şekillendirerek yaklaşım titreşim, gürültü ve israf edilen enerjiyi azaltıyor. Sürücüler için bu daha pürüzsüz hızlanma, daha stabil seyir ve yaşlanan bileşenlere ve değişen hava koşullarına daha iyi tahammül edebilen aktarma organları anlamına geliyor. Yöntem hâlâ bazı kısımlarında sabit bir işletim frekansını varsayıyor olsa da, elde edilen sonuçlar motor sürücülere zekâ ve frekans farkındalıklı kontrol eklemenin daha rafine, dayanıklı ve verimli elektrikli araçlara doğru atılmış önemli bir adım olabileceğini gösteriyor.
Atıf: Sangeetha, E., Ramachandran, V.P. A novel adaptive neuro-fuzzy and adaptive proportional resonant control scheme for PMSM based electric vehicle applications. Sci Rep 16, 8023 (2026). https://doi.org/10.1038/s41598-026-35363-2
Anahtar kelimeler: elektrikli araç motorları, nöro bulanik kontrol, kalıcı mıknatıslı senkron motor, tork dalgalanması azaltma, ileri motor sürücüleri