Clear Sky Science · tr
Tanımlayıcı T-S bulanık sistemler için süper-bükülme algoritması tabanlı bulanık kayma modu kontrolü
Karmaşık Sistemleri Davranışa Getirmek
Balık popülasyonlarını yönetmekten elektrik şebekeleri ve devreleri kararlı tutmaya kadar, birçok gerçek dünya sistemi karmaşık, doğrusal olmayan biçimlerde davranır. Mühendisler, bu tür sistemleri bozulmalar ve belirsizlikler altında dahi güvenli ve verimli tutmak için gelişmiş kontrol algoritmaları kullanır. Bu makale, bu düzensiz sistemleri daha yumuşak bir şekilde dizginleyen yeni bir kontrol stratejisi sunar; ekipmana zarar verebilecek ve performansı düşürebilecek sert, hızlı anahtarlamadan kaçınır.
Neden Bazı Sistemlerin Kontrolü Zordur
Birçok pratik sistem yalnızca niceliklerin zamana göre nasıl değiştiğini tanımlayan denklemlerle değil, aynı zamanda her anda sağlanması gereken cebirsel kısıtlamalarla da yönetilir. Bu tür tanımlayıcı (descriptor) sistemler ekonomi, enerji ağları, mekanik bağlantılar ve biyolojik modellerde ortaya çıkar. Doğrusal olmayan davranışlarını ele almak için araştırmacılar sıklıkla Takagi–Sugeno (T‑S) bulanık modellerine başvurur; bu modeller, karmaşık bir sistemi farklı işletme bölgelerinde geçerli olan daha basit doğrusal parçaların karışımı olarak temsil eder. Güçlü olmalarına rağmen, bu çerçeve uzun süredir teknik bir engelle karşılaştı: çoğu kontrol yöntemi, bulanık “üyelik fonksiyonlarının” zamanla nasıl değiştiğine dair önceden bilgi varsaydı; oysa bu değişimler aslında sistemin ve kontrolcünün bilinmeyen gelecekteki davranışına bağlıdır.
Daha Yumuşak Bir Sağlam Kontrol Türü
Kayma modu kontrolü, bir sistemi istenen yola hızla zorlayıp bozulmalara rağmen orada tutma yeteneğiyle tanınan popüler bir sağlam kontrol yöntemidir. Bunu, belirsizliğe karşı koyan bir şekilde kontrol girişini anahtarlayarak yapar. Ancak hızlı anahtarlama “chattering” adı verilen istenmeyen yüksek frekanslı salınımlara yol açabilir; bu mekanik ve elektrikli sistemlerde zararlı olabilir. Süper‑bükülme algoritması, kayma modu kontrolünün daha gelişmiş bir biçimi olarak anahtarlamayı içsel bir süreç içinde gizler ve chattering'i azaltırken sağlamlığı koruyan sürekli bir kontrol sinyali üretir. Bugüne kadar bu teknik çoğunlukla tek girişli sistemlerle sınırlı kaldı ya da çok girişli sistemleri birçok ayrı denetleyiciye ayırmayı gerektirdi; bu da hesaplama açısından külfetlidir.
Gizli Varsayımları Olmayan Yeni Bir Kayma Yüzeyi
Yazarların ilk önemli katkısı, özellikle tanımlayıcı T‑S bulanık sistemler için tasarlanmış yeni bir “integral” kayma yüzeyidir. Basitçe söylemek gerekirse, bu yüzey sistemin hem mevcut hem de birikimli geçmiş davranışını içeren matematiksel bir koşuldur. Bunu zekice kurgulayarak, yazarlar sistem kayma yüzeyindeyken istenen hareketin sağlanacağını, bulanık üyelik fonksiyonlarının nasıl değişeceğine dair hiçbir ön sınır bilgisine gerek duymadan garanti edebildiklerini gösterir. Bu, önceki yöntemleri sınırlayan kısıtlayıcı bir varsayımı ortadan kaldırır. Analiz, sistemin kayma yüzeyindeki davranışının zamanla kararlı kaldığını kanıtlamak için dikkatle seçilmiş enerji benzeri fonksiyonlar kullanır.
Çok Değişkenli Bir Süper‑Bükülme Denetleyicisi
Bu kayma yüzeyinin üzerine inşa ederek makale, süper‑bükülme algoritmasının çok değişkenli bir versiyonunu geliştirir. Her giriş veya her kayma değişkeni için ayrı bir denetleyici tasarlamak yerine yöntem, hepsini matris formunda birlikte ele alır. Bu, farklı durumların güçlü şekilde bağlı olduğu sistemlere—örneğin bir ekosistemde etkileşen türler veya bir devrede akımlar ve gerilimler—daha uygun hale getirir. Yazarlar, sistem durumlarının kayma yüzeyine anında ulaşması ve ardından sonlu zamanda yakınsamalarını sağlamak için denetleyici kazançlarının nasıl seçileceğine dair koşulları türetir. Kontrol sinyali keskin anahtarlama yerine sürekli olduğundan, chattering tasarım gereği bastırılırken bozulmalara karşı sağlamlık korunur.
Fikri Biyoloji ve Elektronikte Kanıtlamak
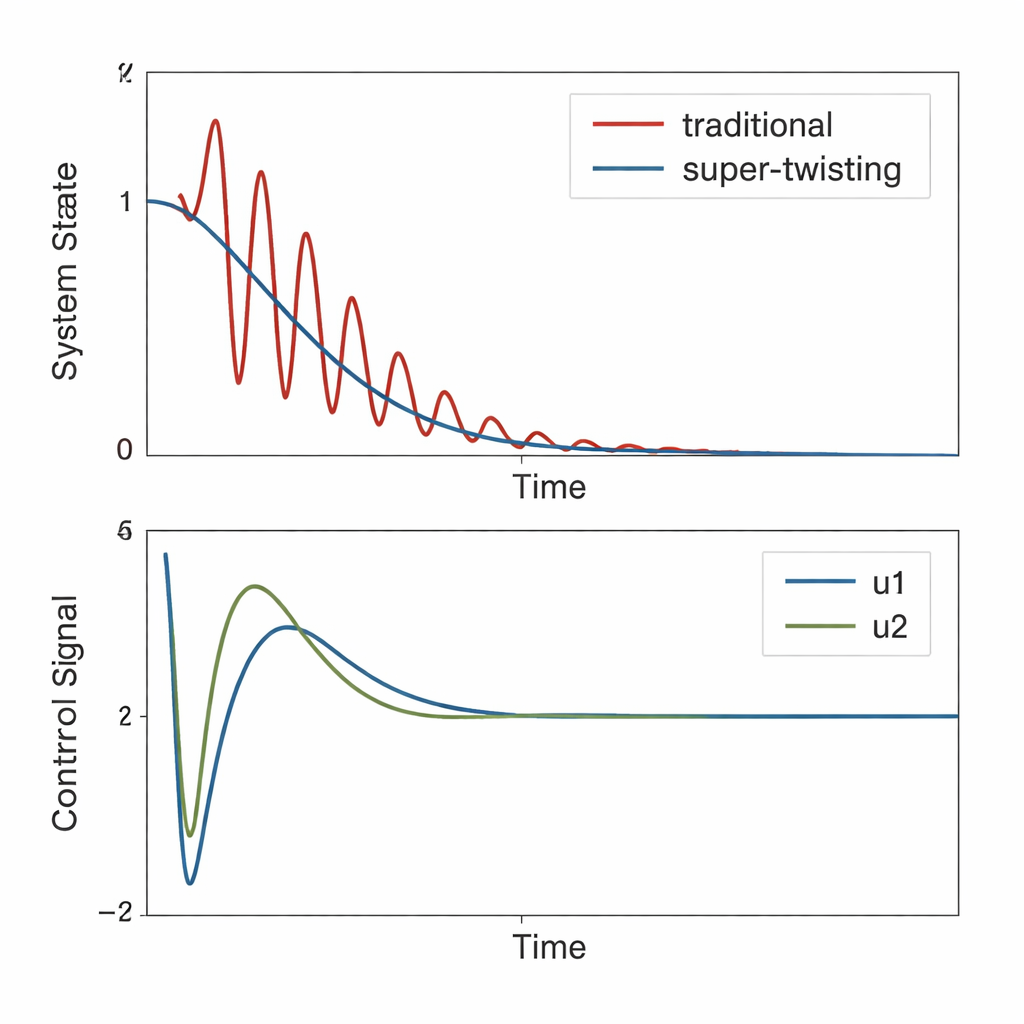
Yöntemlerinin uygulanabilirliğini göstermek için yazarlar bunu iki farklı doğrusal olmayan tanımlayıcı sisteme uygular. Birincisi, olgunlaşmamış ve olgun nüfusları ile üreme kapasitesini ve hasat ile düzenleme gibi yönetim eylemlerini kapsayan bir değişkeni içeren bir biyolojik‑ekonomik senaryoyu modellemektedir. İkinci örnek ise elektronik alanında klasik bir test yatağı olan doğrusal olmayan bir tünel diyot devresidir. Her iki durumda da simülasyonlar, önerilen denetleyicinin sistem durumlarını hızla kararlı hale getirdiğini ve kayma değişkenlerini sıfıra yakın tuttuğunu gösterir; bu da istenen davranışın hassas bir şekilde izlediğini gösterir. Geleneksel kayma modu denetleyicilerle karşılaştırıldığında, yeni yaklaşım hem sistem tepkisinde hem de kontrol sinyallerinde salınımları önemli ölçüde azaltır.
Pratikte Anlamı
Uzman olmayanlar için ana mesaj şudur: Bu çalışma, bazı sağlam yöntemleri rahatsız eden şiddetli anahtarlama olmadan karmaşık, kısıtlı ve belirsiz sistemleri kontrol altında tutmanın bir yolunu sunar. Bulanık modelleme, integral kayma yüzeyi ve çok değişkenli süper‑bükülme algoritmasını birleştirerek yazarlar hem matematiksel olarak kararlı olduğuna dair garanti verilen hem de pratikte daha yumuşak çalışan denetleyiciler tasarlar. Bu, ekolojik kaynak yönetiminden ileri güç elektroniğine ve ağlı kontrol sistemlerine kadar pek çok uygulamaya fayda sağlayabilir; özellikle gelecekte bu fikirler iletişimin saldırılarla kesilebileceği siber‑güvenli ortamlara genişletildiğinde.
Atıf: Li, X., Zhang, W. & Yuan, C. Super-twisting algorithm-based fuzzy sliding mode control for descriptor T-S fuzzy systems. Sci Rep 16, 6981 (2026). https://doi.org/10.1038/s41598-026-35344-5
Anahtar kelimeler: kayma modu kontrolü, bulanık sistemler, sağlam kontrol, doğrusal olmayan dinamikler, süper-bükülme algoritması