Clear Sky Science · tr
3-DOF düzlemsel manipülatör için sağlam model referanslı adaptif kontrolör
Daha zorlu işler için daha akıllı robot kolları
Fabrika robot kolları son derece hızlı ve hassastır, ancak gerçek dünya beklenmedik davrandığında performansları düşebilir—yükler değişir, parçalar biraz farklı yerleştirilir veya beklenmeyen kuvvetler kolu sarsar. Bu makale, yaygın bir üç eklemli robot kolunu davranışı tam olarak modellenmesi zor ve güçlü dış etkiler olduğunda bile doğru ve kararlı tutmanın yeni bir yolunu inceliyor; böylece robotlar fabrika zemininde daha güvenilir ortaklar haline geliyor.
Gerçek fabrikalarda üç eklemin önemi
Çalışma, üç bağlantılı düzlemsel bir robot üzerine odaklanıyor: döner eklemlerle bağlanmış üç rijit segment ve düz bir düzlemde hareket eden bir yapı. Basitliğine rağmen, bu düzen birçok endüstriyel alma-bırakma görevinin, paketleme hattının ve montaj sisteminin belkemiğini oluşturur. Zorluk, bir eklemin hareketinin diğerlerini güçlü şekilde etkilemesi ve kolun hareketini tanımlayan denklemlerin yüksek derecede doğrusal olmayan ve sıkı bağlı olmasıdır. Geleneksel kontrolörler her şey bilindiğinde ve öngörülebilir olduğunda iyi çalışabilir; ancak robotun yükü değiştiğinde, sürtünme veya kütle doğru modellenmediğinde ya da dışsal etkiler kolu yoldan çıkardığında zorlanırlar.
Karmaşık hareketi daha basit parçalara ayırmak
Bu karmaşıklığı dizginlemek için yazarlar önce bağlantı kütlelerinin, eklem açıların ve yerçekiminin hareketi nasıl ürettiğini içeren ayrıntılı bir matematiksel model türetiyorlar. Ardından temel bir sadeleştirme sunuyorlar: bir “ayırma” stratejisi. Robotu tek bir karışık üç eklemli sistem olarak ele almak yerine, her eklem sanki ivmesi büyük ölçüde kendi motor torku ve hızına bağlıymış gibi modelleniyor. Kalan etkiler—eklemler arasındaki etkileşimler, yerçekimi terimleri ve modellenmesi zor diğer etkiler—belirsizlikler olarak paketleniyor. Bu ayırma, kontrol problemini her eklem için birer tane olmak üzere üç daha küçük, daha yönetilebilir alt sisteme bölmeye izin veriyor; yine de gerçek sistemin altında karmaşık bir yapı olduğunu kabul ediyor. 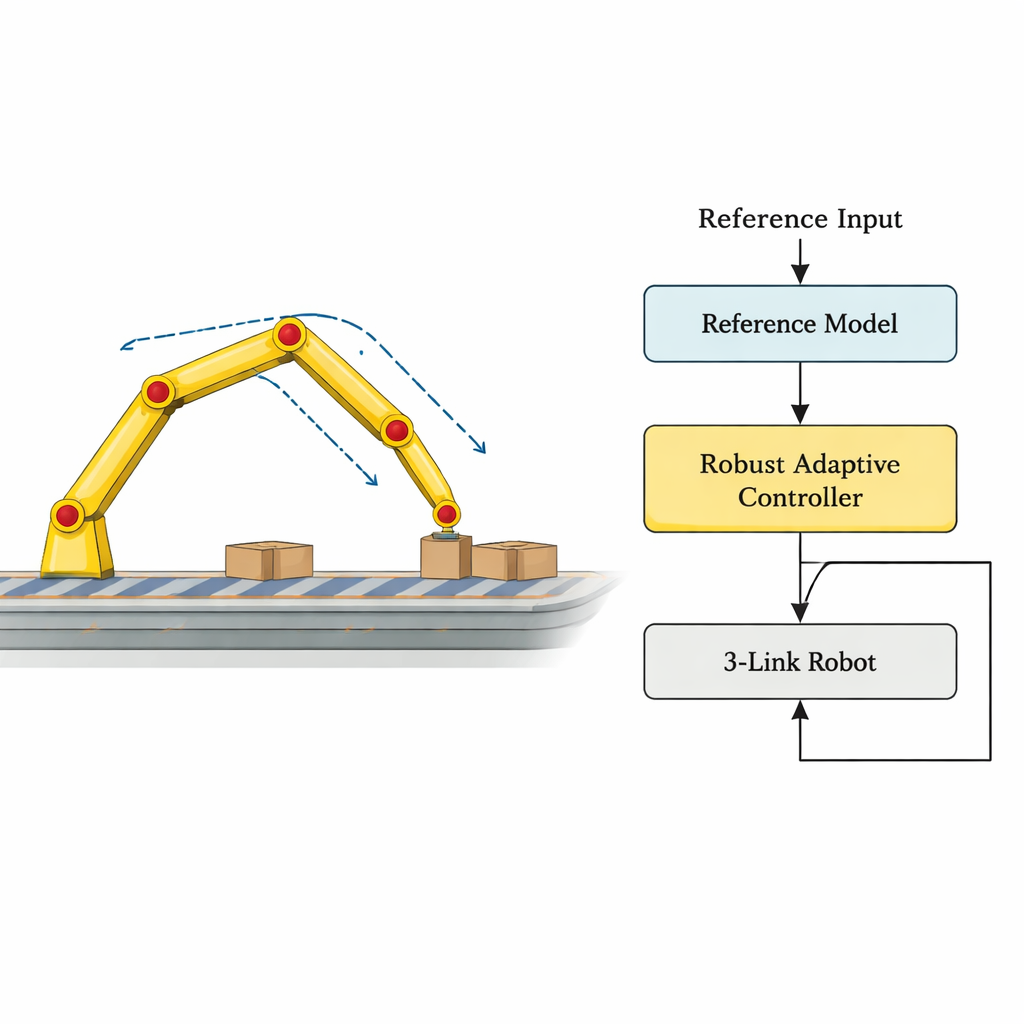
Robotu hareketli hedefi takip etmeyi öğretmek
Bu sadeleştirilmiş modelin üzerine yazarlar bir model referanslı adaptif kontrolör (MRAC) kuruyorlar. Basitçe, önce ideal bir tepki tanımlanıyor—her eklemin bir komut verildiğinde zaman içinde nasıl hareket etmesi gerektiğini söyleyen bir referans model. Kontrolör, robotun gerçek hareketini bu ideal ile sürekli karşılaştırıyor ve farkı azaltmak üzere iç kazançlarını gerçek zamanlı ayarlıyor. Mükemmel koşullar altında geleneksel MRAC robotu referansı yakından takip ettirebilir, ama ciddi bir zayıflığı var: sürekli bozucu etkiler veya modelleme hataları varlığında adaptif kazançlar aşırı değerlere kayabilir; bu da salınımlara, enerji israfına ve hatta kararlılığın kaybına yol açar. Parametre kayması olarak adlandırılan bu olgu, sade MRAC’ı gerçek endüstriyel kullanım için riskli kılıyor.
Adaptasyonu pervasız değil, sağlam yapmak
Bu kaymayı önlemek için makale, bilinmeyen etkileri açıkça hesaba katan birkaç “sağlam” MRAC çeşidi geliştiriyor. Yazarlar, kontrolör kazançlarını güvenli sınırlar etrafında nazikçe geri çeken veya uyum çabasını izleme hatasının büyüklüğüne göre ölçeklendiren ek terimleri adaptasyon yasalarına ekliyorlar. Test edilen stratejiler arasında sigma-değiştirme, hata-değiştirme ve enerji farkında optimal kontrol modifikasyonu bulunuyor; sonuncusu öne çıkıyor. Hızlı salınımlı yollar, alma-bırakma hareketleri, %50 kütle değişimleri, ani yük eklemeleri ve güçlü yüksek frekanslı rahatsızlıklar dahil olmak üzere kapsamlı bilgisayar simülasyonları aracılığıyla sağlam MRAC, robotun izleme hatasını küçük ve kontrol sinyallerini düzgün tutuyor. Geleneksel MRAC’ın iç kazançlarının sınırsızca büyüdüğü senaryolarda, sağlam versiyonlar onları iyi davranışlı tutuyor ve kolun hareketini kararlı kılıyor. 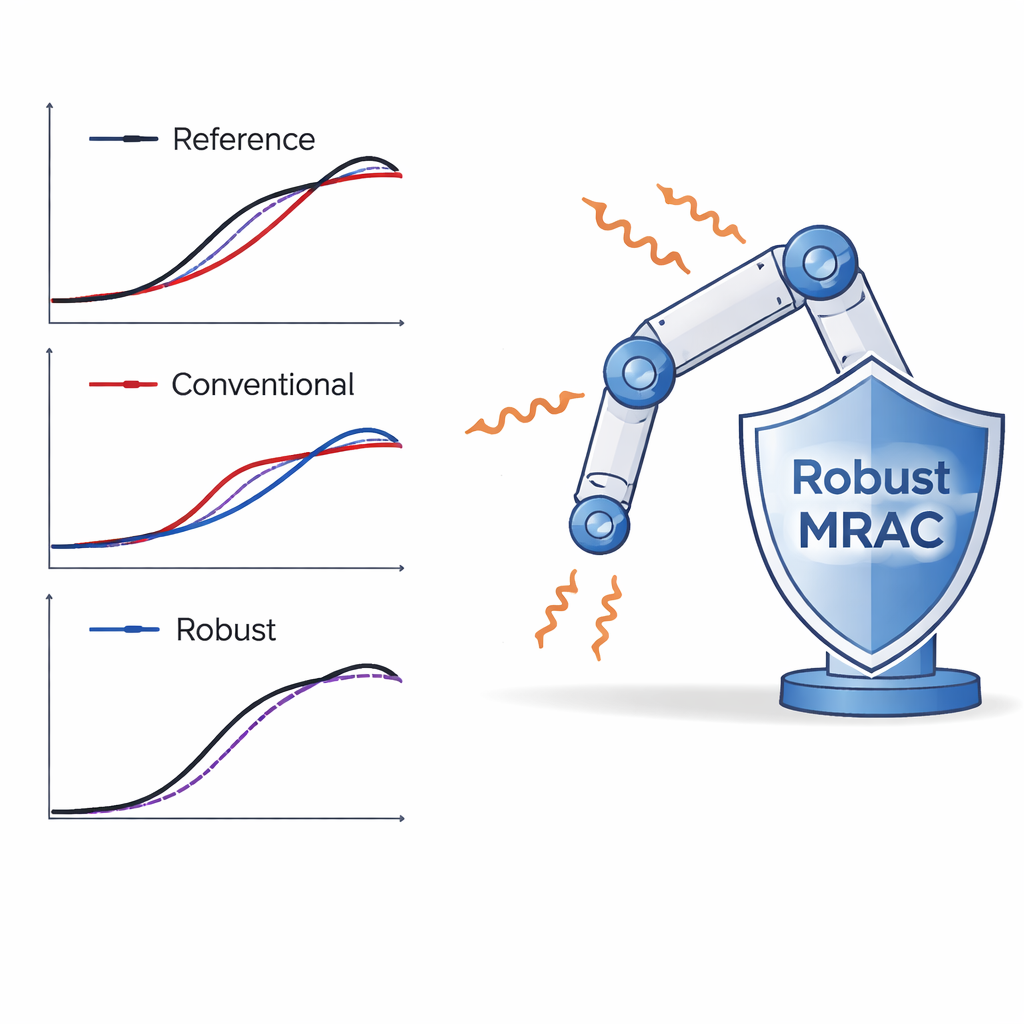
Gerçek dünyadaki robotlar için anlamı
Bir uzman olmayan okuyucu için çıkarım şu: bu çalışma, endüstriyel robot kolları için daha akıllı bir “otopilot” sunuyor—çevre veya yük değiştiğinde bile öğrenmeye ve uyum sağlamaya devam eden, ancak kararsız hale gelmeyen bir sistem. Karmaşık üç eklemli dinamikleri daha basit parçalara ayırarak ve öğrenme sürecine güvenlik önlemleri ekleyerek, önerilen sağlam adaptif kontrolör robotun istenen yolları doğru takip etmesini ve makul motor çabası kullanmasını sağlıyor; belirsizlikler ve dış etkiler altında bile. Bu, pratik robotikleri, hızla yeniden görev verilebilen, beklenmedik koşullarla başa çıkabilen ve uzmanların sürekli yeniden ayar yapmasına gerek kalmadan insanlarla güvenle birlikte çalışabilecek gerçek anlamda tak-çalıştır sistemlere bir adım daha yaklaştırıyor.
Atıf: Mohammed, T.K., Abdissa, C.M. Robust model reference adaptive controller for 3-DOF planar manipulator. Sci Rep 16, 4889 (2026). https://doi.org/10.1038/s41598-026-35309-8
Anahtar kelimeler: robot manipülatör kontrolü, adaptif kontrol, endüstriyel robotik, trajektori takibi, sağlam kontrol