Clear Sky Science · tr
UAV görüntülerinde küçük nesne tespiti için geliştirilmiş YOLOv11n: daha az parametreyle daha yüksek doğruluk
Neden gökten küçük şeyleri fark etmek önemli
Küçük uçan robotlar, trafik izleme ve afet müdahalesinden paket teslimatına kadar günlük yaşamın ayrılmaz bir parçası haline geliyor. Ancak inatçı bir sorun var: bir drone yüzlerce metre yükseklikten aşağı baktığında insanlar, arabalar ve tekneler birkaç piksele küçülüyor. Standart bilgisayarla görme sistemleri bu küçük lekeleri sıkça kaçırıyor veya arka plan karmaşasıyla karıştırıyor. Bu makale, drone görüntülerindeki bu minik nesneleri tespit etmek üzere özel olarak ayarlanmış, popüler bir tespit sistemi olan YOLOv11n’in daha akıllı ve daha yalın bir versiyonunu sunuyor; hedef, hafif yerel bilgisayarlarda verimli çalışırken küçük nesneleri yakalamak.
Ucuz, bulanık ayrıntılarda daha fazla şey görmek
Drone görüntüleri algoritmalar için zorlu bir ortam sunar. Hedeflerin çoğu 32×32 pikseldan daha küçük ve birçoğu 16 pikselin altında kalır. Hareket, titreşim, değişen ışık, pus ve yoğun kent arka planları bu küçük hedefleri ayırt etmeyi daha da zorlaştırır. Aynı zamanda dronlar genellikle sınırlı işlemci gücüne ve enerjiye dayanır; bu yüzden ağır modeller pratik değildir. Yazarlar, gerçek zamanlı, kompakt bir algılayıcı olan YOLOv11n’den başlayıp iç bileşenlerini yeniden tasarlayarak küçük, düşük kontrastlı alanlardan daha fazla yararlı bilgi çıkarmayı hedefliyor, modelin şişmesini engelleyerek. Amaç açık ve zorlu: küçük nesnelerde belirgin şekilde daha yüksek doğruluk, öğrenilebilir parametre sayısında eşit veya daha az ve uç cihazlarda kabul edilebilir hız.
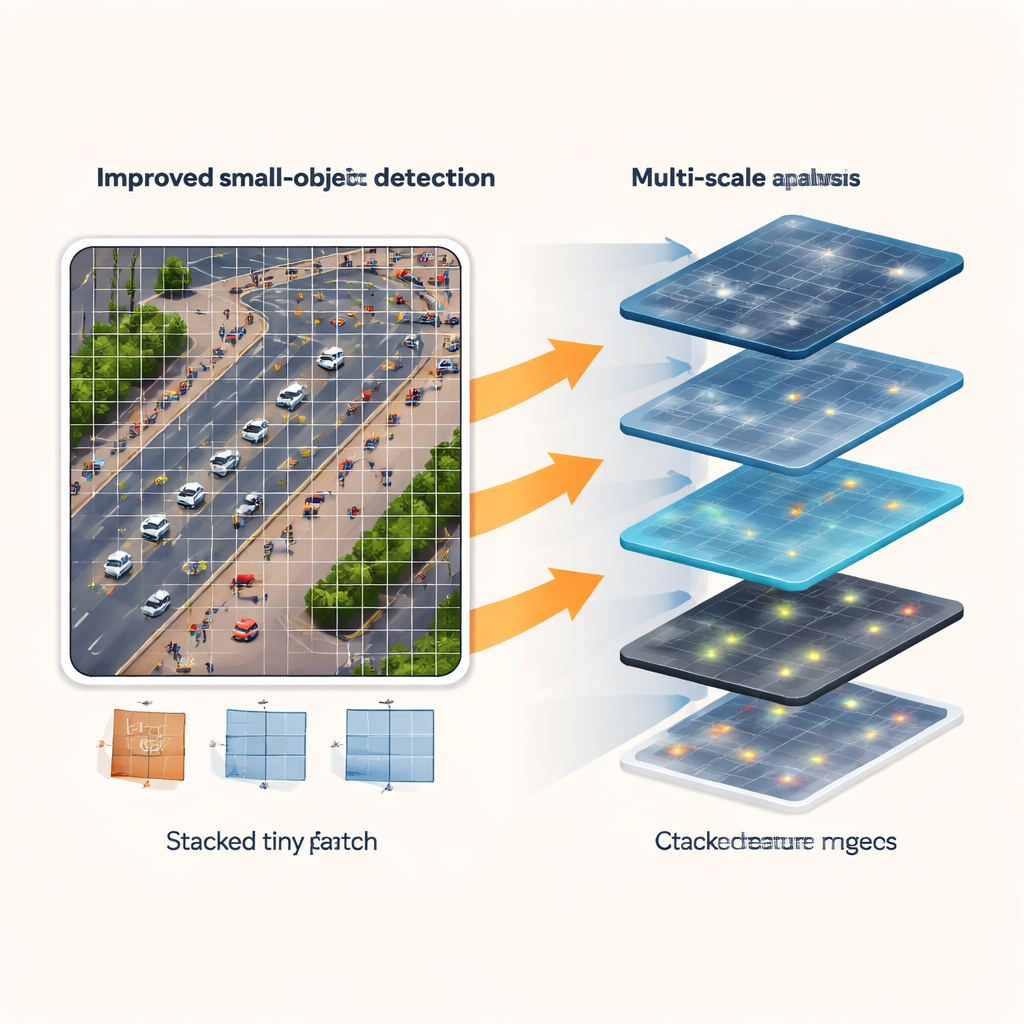
Sahnedeki çoklu ölçeklerden öğrenme
İlk iyileştirme, ağın sahneyi “görme” biçimine odaklanıyor. Tek bir sabit boyutlu pencere yerine, yeni Çok Ölçekli Kenar-Özelliği Uyarlamalı Seçim (Multiscale Edge-Feature Adaptive Selection, MSEAF) modülü aynı anda görüntüyü birden fazla ölçekte inceliyor. Kabaca bakışlar yolların, binaların ve kalabalıkların genel düzenini yakalarken, daha ince ölçekler bireysel arabalar veya kişiler gibi detayları koruyor. Kenar vurgulama adımı, insanlar için kolayca görülebilen fakat küçük görüntü parçalarında sıklıkla yok olan sınırları ve şekilleri öne çıkarıyor. Akıllı bir füzyon mekanizması en bilgi verici bölgeleri güçlendirirken arka plan gürültüsünü baskılıyor. Bu çok ölçekli, kenar-dikkatli temsil, ağın geri kalanına zor görünen nesneleri bulmak için daha zengin bir başlangıç noktası sağlıyor.
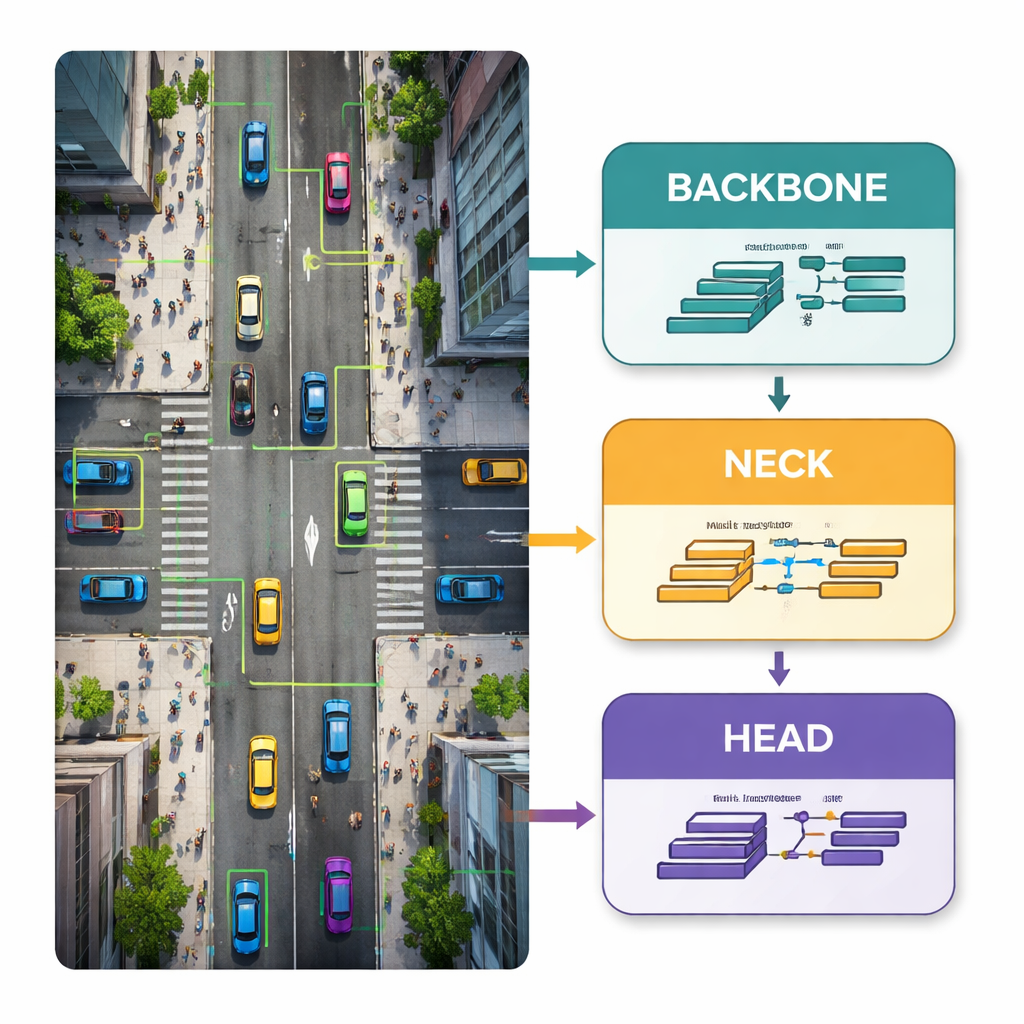
İşlem hattı boyunca küçük nesneleri hayatta tutmak
Geleneksel YOLO ağları, bilgi girdi hattından çıktı hattına ilerlerken özellik haritalarını tekrar tekrar küçültür. Büyük nesneler için bu uygundur; fakat küçük nesneler için ölümcül olabilir: birkaç kez aşağı örnekleme yaptıktan sonra bir yaya iç haritada yalnızca bir ya da iki piksel kaplayabilir veya tamamen yok olabilir. Bunu önlemek için yazarlar ağın orta “boyun” bölümünü yeniden şekillendiriyor ve daha yüksek çözünürlüklü özellikler üzerinde çalışan yeni bir P2 tespit başlığı ekliyor. ScalCat ve Scal3DC adlı özel modüller, sığ katmanlardan gelen ince detayları ve derin katmanlardan gelen zengin bağlamı dikkatlice birleştirerek birbirlerini güçlendirmesini sağlıyor. Sonuç, küçük arabaları ve insanları hız uğruna feda etmek yerine birden çok ölçek boyunca takip edebilen bir algılayıcı oluyor.
Daha az ayarla daha keskin kararlar
Son adım, tespit başlığı olarak bilinen tahmin aşamasını sadeleştirmek. Orijinal tasarımda, çok kanallı daha derin katmanlar büyük nesnelere ayrılmıştı; oysa drone sahnelerinde bunlar nispeten nadirdir. Yeni Paylaşılan Yeniden-parametrelenmiş Tespit (Shared Re-parameterized Detection, SRepD) başlığı, ölçekler arasında kanal sayısını eşitliyor ve akıllı bir eğitim hilesi kullanıyor: öğrenme sırasında birkaç uzmanlaşmış konvolüsyon dalı, özellikleri vurgulamanın farklı yollarını deniyor; çıkarım anında ise bu dallar matematiksel olarak tek bir basit konvolüsyona birleştiriliyor. Bu paylaşılan, yeniden-parametrelenmiş tasarım, özelliklerin nasıl birleştiğini iyileştirirken parametre sayısını azaltıyor ve uç cihazlar için hesaplamayı yönetilebilir kılıyor.
Gerçek dünya testleri sayılarda ne diyor
Geliştirilmiş model üç zorlu kamu veri kümesinde test edildi: VisDrone2019 (karma kentsel sahneler), TinyPerson (kara ve deniz üzerinde son derece küçük kişiler) ve HazyDet (drone bakış açısıyla yoğun puslu araçlar). VisDrone2019’da yeni tasarım, anahtar bir doğruluk ölçütü (mAP50) ve hassasiyeti orijinal YOLOv11n’e kıyasla 4,6 puan artırırken parametreleri yaklaşık %8,5 oranında azaltıyor. TinyPerson’da iyileşmeler daha da büyük—mAP50’de yaklaşık 5,9 puan ve hassasiyette 5,6 puan—benzer bir parametre azaltımıyla ve kompakt model dört kat daha fazla parametre kullanan çok daha büyük bir YOLOv11s’ten bile daha iyi performans gösteriyor. Puslu koşullarda, yükseltilmiş algılayıcı temel modele kıyasla doğruluk ve dayanıklılık ölçütlerinde üstünlük sağlıyor ve hepsi düşük güçlü bir Huawei Atlas 200 DK uç platformunda gerçek zamanlı hızları koruyor.
Günlük drone kullanımı için neden önemli
Uzman olmayanlar için temel çıkarım şudur: bu araştırma, dronların aynı anda hem daha keskin görüşe hem de kaynak verimliliğine ulaşabileceğini gösteriyor. Ağın nerede ve nasıl detay aradığını yeniden düşünerek, küçük hedefler için yüksek çözünürlüklü bilgiyi koruyarak ve tahmin mekanizmasını sadeleştirerek yazarlar doğruluk ve boyut arasındaki yaygın takası kırıyor. Ortaya çıkan sistem, hantal donanım gerektirmeden kalabalık, puslu veya karmaşık sahnelerde uzak ve küçük insanları ve araçları tespit etmede daha başarılı. Bu tür ilerlemeler, trafik güvenliği, arama-kurtarma ve çevresel gözlem için güvenilir, gerçek zamanlı hava izlemesini günlük uygulamaya daha da yaklaştırıyor.
Atıf: Zhu, H., Xie, X. Enhanced YOLOv11n for small object detection in UAV imagery: higher accuracy with fewer parameters. Sci Rep 16, 5536 (2026). https://doi.org/10.1038/s41598-026-35301-2
Anahtar kelimeler: drone nesne tespiti, küçük nesne tanıma, YOLO sinir ağı, hava görüntüleme analizi, UAV için uç cihaz yapay zekâsı