Clear Sky Science · tr
Otonom sürüş sistemlerinde algılama için çokmodlu öğrenme ve simülasyon yaklaşımı
Daha Akıllı Sürücüsüz Arabalar
Sürücüsüz arabalar daha güvenli yollar ve daha az trafik vaad ediyor, ancak bunun için çevrelerini gerçekten anlayabilmeleri gerekiyor. Bu makale, otonom araçların dikkatli bir insan sürücü gibi çevrelerini “görmelerine”, “hissetmelerine” ve “öngörmelerine” yardımcı olmanın yeni bir yolunu inceliyor—farklı sensörleri harmanlayarak, gerçek dünyanın sanal bir kopyasında güvenli testler yaparak ve aracın kararlarını insanlara daha şeffaf hale getirerek.
Yolu Birkaç “Duyu” ile Görmek
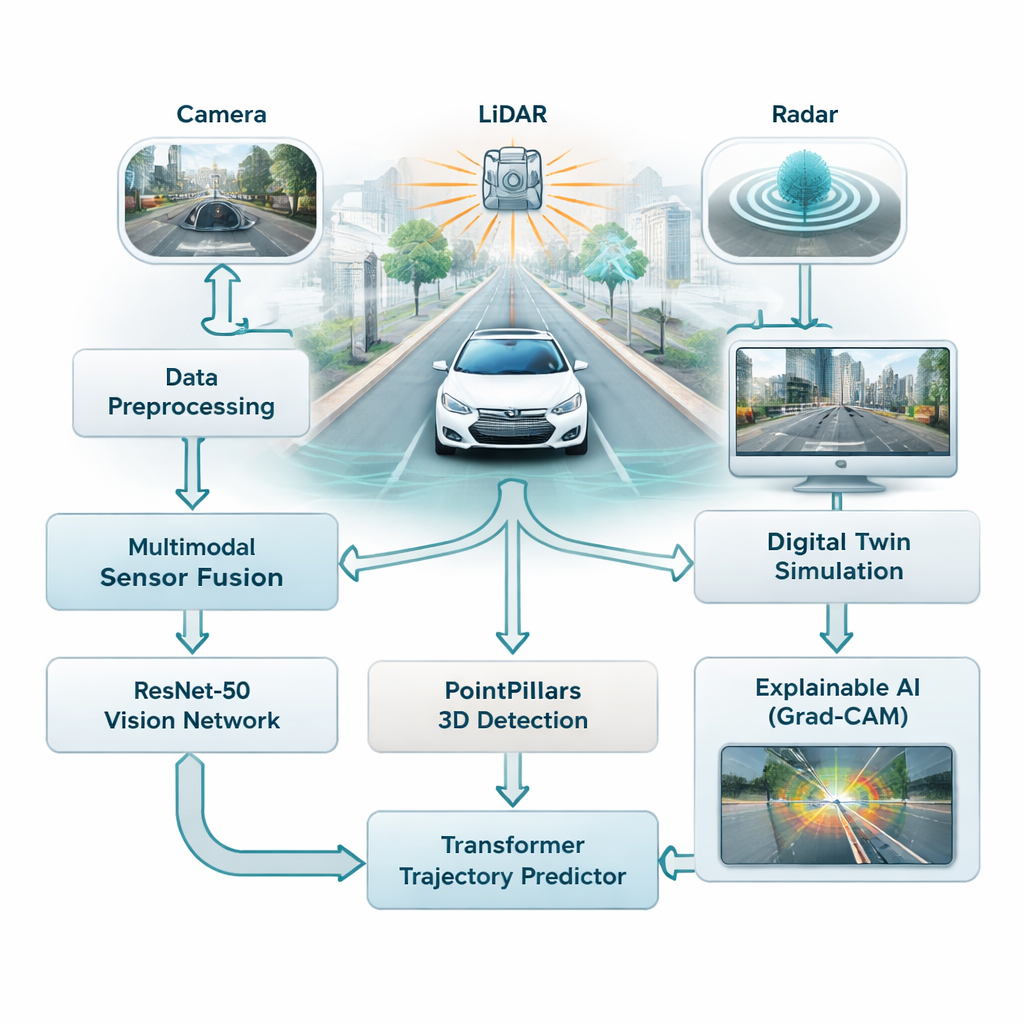
Günümüzde çoğu sürücü destek sistemi büyük ölçüde kameralara dayanıyor; kameralar iyi ışıkta iyi çalışsa da sis, yağmur veya gece koşullarında zorlanıyor. Bu çalışma, aracın tek, kırılgan bir bilgi kaynağına bağımlı olmamasını sağlamak için üç farklı sensör türünü—kameralar, lazer tarayıcılar (LiDAR) ve radar—birleştiriyor. Kameralar zengin renk ve ayrıntı yakalarken, LiDAR sahnenin hassas 3B resmini oluşturur ve radar kötü hava koşullarında güvenilir kalır. Yazarlar bu üç akışı trafikte tek bir görünümde birleştirerek araca yolları, yayaları ve diğer araçları daha eksiksiz ve daha güvenilir bir şekilde anlama imkânı veriyor.
Aracı Tanımaya ve Öngörmeye Öğretmek
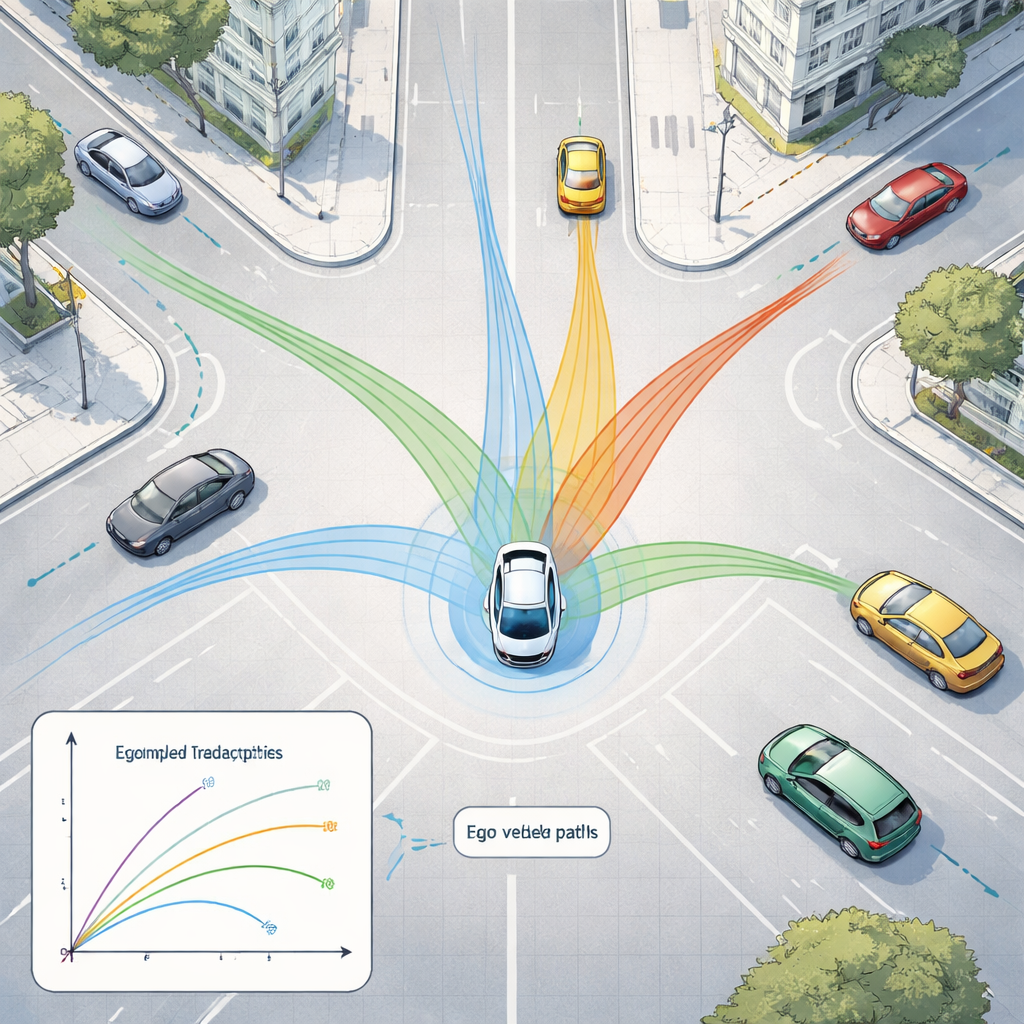
Bu veri selini anlamlandırmak için çerçeve iki aile modern yapay zeka modelini kullanıyor. Öncelikle ResNet-50 adlı derin bir görüntü ağı kamera görüntülerini tarayarak genel durumu yakalıyor—yolun ne kadar kalabalık olduğu, şeritlerin nerede göründüğü ve sahnenin nasıl düzenlendiği gibi. Aynı zamanda PointPillars adlı 3B model LiDAR nokta bulutlarını okuyarak araçları ve diğer nesneleri üç boyutta konumlandırıyor. Bu sinyaller daha sonra zaman içinde değişimleri anlamada başarılı olan, başlangıçta dil için tasarlanmış bir yapay zeka türü olan Transformer’a besleniyor. Burada Transformer, hem nesnelerin geçmiş hareketini hem de yolun yapısını göz önünde bulundurarak çevredeki araçların ve diğer hareketli nesnelerin önümüzdeki birkaç saniyede nasıl hareket edeceklerini tahmin etmeyi öğreniyor.
Güvenli Bir Sanal Test Pisti Kurmak
Riskli durumları doğrudan kamu yollarında test etmek yerine, araştırmacılar sistemlerini Boston ve Singapur’dan büyük bir halka açık veri setine dayanan gerçek şehir sokaklarının sanal bir kopyası olan bir dijital ikize bağlıyor. Bu simüle edilmiş dünyada, aracın sensörleri, hareketleri ve çevresi istendiği gibi yeniden oynatılabiliyor ve değiştirilebiliyor; yapay zeka nesneleri izlemeye ve bunların gelecekteki yollarını tahmin etmeye çalışıyor. Sistem bu “ya şöyle olsaydı?” senaryolarını 50 milisaniyenin altında tepki süreleriyle gerçek zamanda çalıştırabiliyor; böylece mühendislere ani frenleme, keskin dönüşler veya kalabalık kavşaklar gibi uç durumları kimseyi tehlikeye atmadan inceleme imkânı sağlanıyor.
Yapay Zekânın “Kara Kutusu”na Göz Atmak
Derin öğrenmenin sıkça eleştirilen yönlerinden biri, modelin belirli bir kararı neden verdiğini anlamanın zor olabilmesidir. Bunu ele almak için yazarlar, modelin çıktısını en çok etkileyen görüntü bölümlerini vurgulayan Grad-CAM adlı bir yöntem kullanıyor. Bu ısı haritaları, örneğin ağın bir yörünge tahmini yaparken diğer bir araca, bir yayaya veya bir şerit işaretine mi odaklandığını gösteriyor. Bu açıklama adımı çevrimdışı olarak çalışsa ve aracın gerçek zamanlı döngüsünde yer almasalar da, mühendislerin ve güvenlik denetçilerinin sistemin doğru ipuçlarına dikkat edip etmediğini doğrulamasına yardımcı oluyor; bu da kamu güveninin inşa edilmesi için kritik önemde.
Daha İyi Sürüş Ne Kadar İyi?
Önerilen çerçeve yüzlerce kentsel sürüş sahnesinde test edildiğinde, 3B nesneleri doğru şekilde tespit ediyor ve sabit hız veya sabit ivme varsayan basit fiziksel kurallardan daha kesin hareket tahminleri yapıyor. Tahmin hataları—tahmin edilen pozisyonların gerçeğe ne kadar saptığı—bu tür temel yaklaşımlara göre anlamlı şekilde daha küçük ve güçlü bir yinelemeli yapay zeka modeline yakın değerlere sahipken yine de gerçek zamanlı kullanım için yeterince hızlı çalışıyor. Farklı ağ tasarımlarını karşılaştıran dikkatli deneyler, daha derin bir görüntü modelinin ve orta derinlikte bir 3B dedektörün doğruluk ile hız arasında en iyi dengeyi sağladığını ve model sıkıştırma sonrası sistemin daha küçük yerleşik bilgisayarlara dağıtılabileceğini gösteriyor.
Günlük Sürücüler İçin Anlamı Ne?
Uzman olmayanlar için mesaj şudur: Daha güvenli, daha güvenilir sürücüsüz arabalar muhtemelen birden fazla sensörü harmanlayan, sahnenin nasıl evrileceğini tahmin eden ve gerçekçi sanal dünyalarda kapsamlı şekilde test edilen bir yaklaşımdan gelecek. Algılama, tahmin, simülasyon ve insan tarafından anlaşılabilir açıklamaları tek bir tasarımda birleştirerek bu çalışma, otonom araçları yol üzerinde gizemli makinelerden ziyade temkinli, şeffaf ortaklar gibi davranmaya bir adım daha yaklaştırıyor.
Atıf: Almadhor, A., Al Hejaili, A., Alsubai, S. et al. A multimodal learning and simulation approach for perception in autonomous driving systems. Sci Rep 16, 5505 (2026). https://doi.org/10.1038/s41598-026-35095-3
Anahtar kelimeler: otonom sürüş, sensör füzyonu, yörünge tahmini, 3B nesne tespiti, dijital ikiz simülasyonu