Clear Sky Science · tr
Fizik tarafından yönlendirilen uyarlamalı iyileştirmeler ve dikkat güçlendirici ile geliştirilmiş çift‑alan YOLOv11‑UOS kullanarak doğru gerçek zamanlı sualtı nesne segmentasyonu
Daha Keskin Dijital Gözlerle Derinlere İnmek
Okyanuslarımız artık yalnızca dalgıçlar ve denizaltılar tarafından değil, sualtı robotlarına takılan akıllı kameralarla da keşfediliyor. Bu kameralar gemi enkazlarını aramaya, deniz üstü boru hatlarını denetlemeye ve mercan resifleri ile balık popülasyonlarını izlemeye yardım ediyor. Ancak sualtı görüntüleri sıklıkla bulanık, mavi‑yeşil tonlu ve görsel karmaşa dolu olduğu için, nesneleri tespit etmek insanlar için zor olduğu kadar bilgisayarlar için de zor. Bu makale, sualtı görüntülerini temizleyen ve ardından nesneleri hızlıca tespit edip konturlarıyla ayıran, gerçek zamanlı robot görevlerine yetecek hızda çalışan yeni bir bilgisayarlı görü sistemi sunuyor.
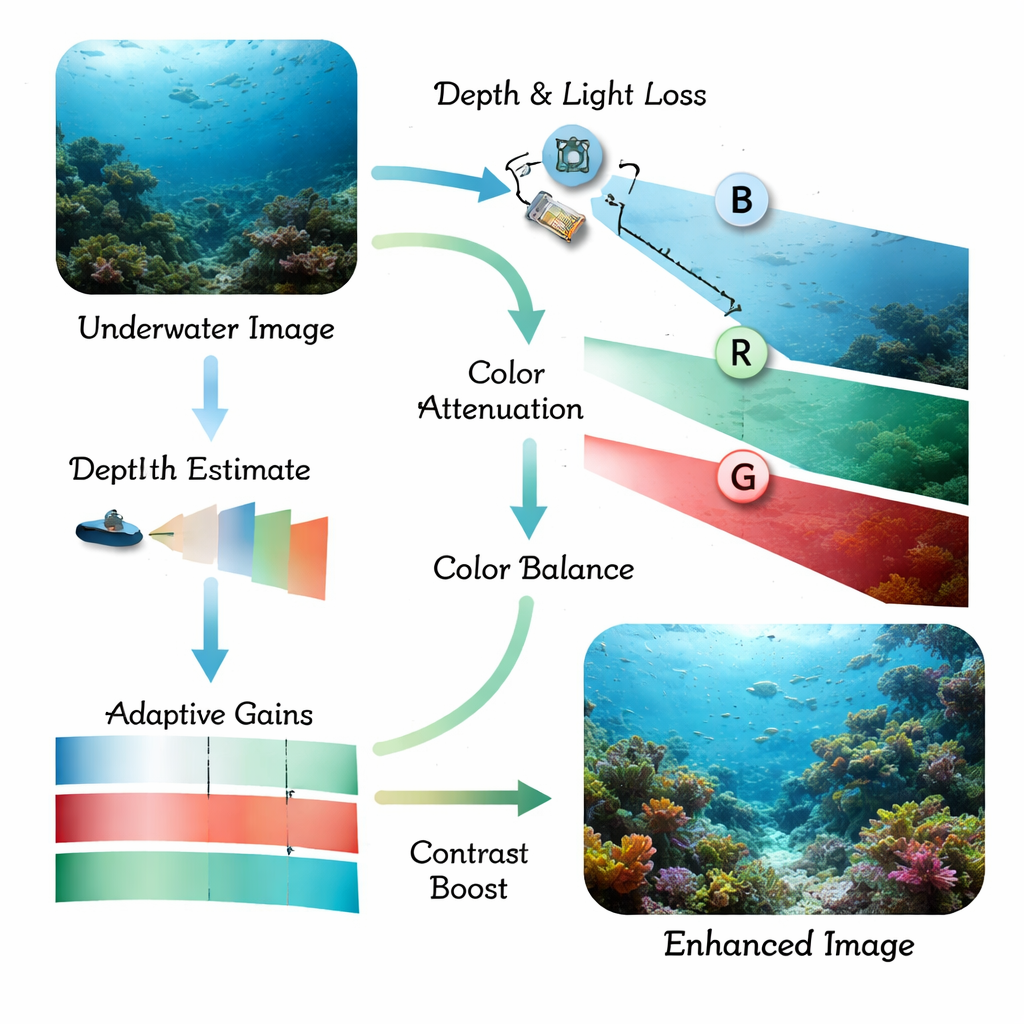
Sualtı Görmenin Neden Bu Kadar Zor Olduğu
Işık suda havadan çok farklı davranır. Güneş ışığı aşağı doğru ilerlerken kırmızı tonlar önce kaybolur, sonra yeşiller zayıflar ve geriye mavimsi bir renk ile düşük kontrastlı sahneler kalır. Suda asılı küçük partiküller ışığı saçıp kenarları belirsizleştirir ve küçük detayları saklayan bir pus oluşturur. Geleneksel nesne‑algılama programları ve hatta modern derin öğrenme modelleri bile bu bozulmuş görüntülerle zorlanır: balıklar mercanla kaynaşır, insan yapımı yapılar arka plana karışır ve düşük ışıklı sahneler neredeyse okunamaz hale gelir. Önceki çalışmalar genellikle ya görüntü temizlemeye ya da nesne tespitine odaklandı; bu da nihai sistemi çok yavaş, kırılgan veya özellikle bulanık sularda yine de yetersiz bırakabiliyordu.
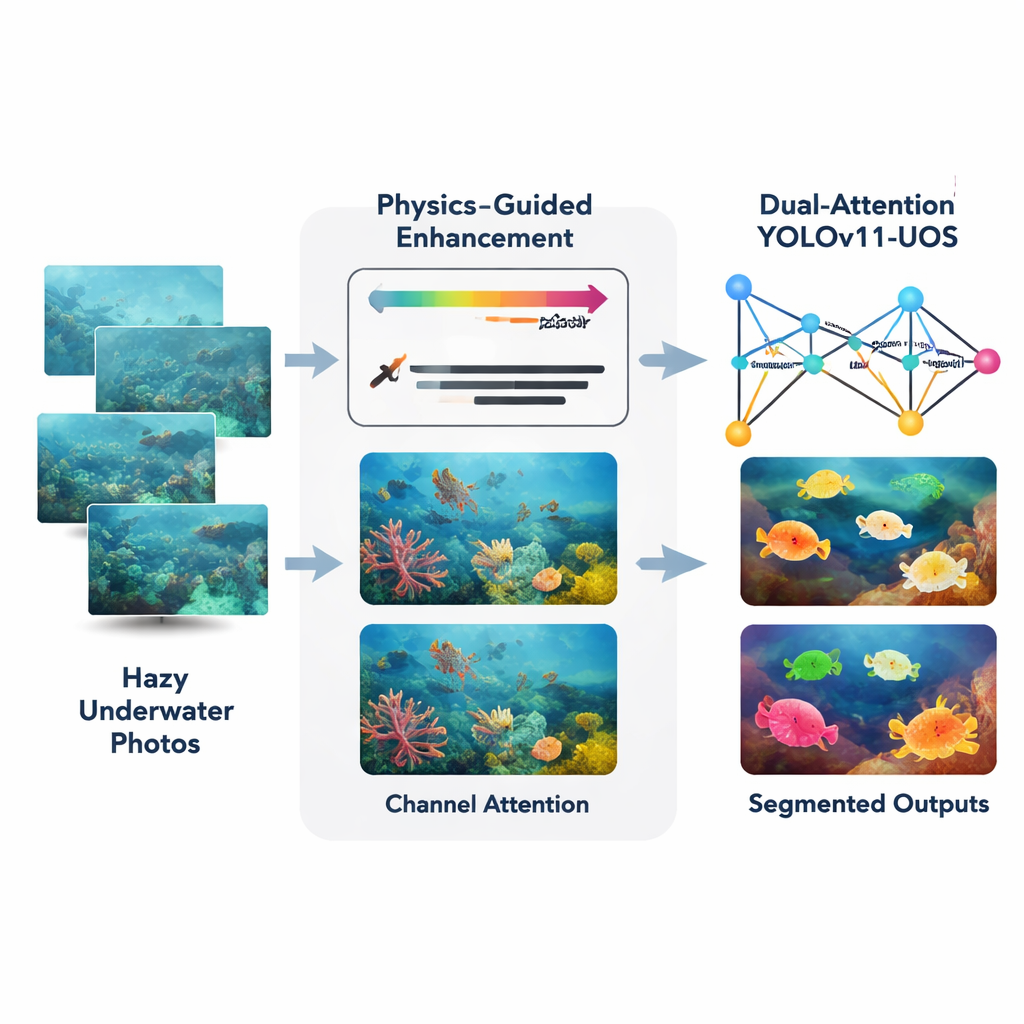
İki Aşamalı Strateji: Önce Temizle, Sonra Odaklan
Yazarlar, sualtı sahneleri ve örnek segmentasyonu (her nesne için hassas bir kontur çizme) için burada özelleştirilmiş, gerçek zamanlı bir dedektör olan YOLOv11 etrafında inşa edilmiş birleşik bir yaklaşım öneriyor. Önce, Uygulamalı Fizik‑Yönlendirmeli Uyarlamalı İyileştirme adlı bir ön uç modül ham sualtı fotoğraflarını alır ve su içinde ışığın nasıl emildiği ve saçıldığına dair basitleştirilmiş bir fiziksel model kullanarak düzeltiler yapar. Sahnenin her bölümünün kameraya ne kadar uzak olduğunu tahmin eder ve kırmızı ışığın yeşil ve maviden daha fazla kaybını telafi eder. Bu, daha doğal renkleri geri getirir ve yerel kontrastı artırır; dikkatli bir histogram tabanlı adım ise karanlık veya bulanık bölgelerde bile gürültüyü yükseltmeden kenarları keskinleştirir.
Ağ İçin Nerelere Bakacağını Öğretmek
Görüntü temizlendikten sonra, dikkat mekanizmalarıyla donatılmış yükseltilmiş bir YOLOv11 omurgasına iletilir. Bu ek modüller bir spot ışığı ve bir renk filtresi gibi davranır. Mekansal dikkat ağın balığın dış hattı veya sualtı bir eserin kenarı gibi önemli bölgelere daha fazla odaklanmasını ve kum veya sallanan bitkiler gibi dikkat dağıtıcı arka planı görmezden gelmesini sağlar. Kanal dikkat ise sistemin farklı renk ve doku desenlerini ne ölçüde önemseyeceğini ayarlar; böylece faydalı görsel ipuçları vurgulanırken ilgisiz olanlar bastırılır. Bu çift dikkat aşaması birlikte, ağın nesnelerin nerede ve ne olduğunu belirlemeden önce daha keskin iç temsilimler oluşturmasına yardımcı olur.
Gerçek Okyanuslarda ve Zor Koşullarda Test Etme
Sistemin pratikte ne kadar iyi çalıştığını görmek için araştırmacılar, birkaç açık sualtı görüntü koleksiyonunda ve değişen derinlik ve bulanıklıkta kıyı sularından dikkatle etiketlenmiş 7.000’den fazla fotoğraftan oluşan yeni bir özel veri setinde eğitip test ettiler. Standart tespit ve segmentasyon puanlarını ölçtüler ve yöntemlerini U‑Net, DeepLab, dönüştürücü‑tabanlı segmentörler ve yeni modüller olmadan temel bir YOLOv11 sistemi gibi yaygın kullanılan modellerle karşılaştırdılar. Birleştirilmiş iyileştirme‑artı‑dikkat tasarımı, temel YOLOv11’e göre ortalama tespit doğruluğunu yaklaşık 6,5 yüzdelik puan artırdı; nesne konturları belirgin şekilde daha temiz ve kaçırılan ya da yanlış tespit edilen öğeler daha azdı. Önemli olarak, sistem modern bir grafik işlemcide yaklaşık 38 kare/saniye hızında çalışmaya devam ediyor; bu da robotik platformlarda neredeyse gerçek zamanlı kullanım için yeterince hızlı.
Bu Deniz Robotları ve Araştırma İçin Ne Anlama Geliyor
Basitçe söylemek gerekirse çalışma, akıllı ön işlemenin ve odaklanmış dikkatin bilgisayarların sualtında çok daha iyi "görmesini" sağladığını gösteriyor. Önce sualtı fotoğraflarını bozan bazı fiziksel etkileri geri alıp ardından tespit ağını en bilgilendirici bölgelere ve renklere odaklanmaya yönlendirerek, yöntem balıkların, mercanların ve insan yapımı yapıların daha keskin, daha güvenilir konturlarını sunuyor. Bu, otonom sualtı araçlarının güvenli navigasyonuna, hassas deniz ekosistemlerinin izlenmesine ve insan gözetimi olmadan kritik denizaltı altyapısının denetimine yardımcı olabilir. Aşırı çamurlu sularda veya çok derin, kırmızı ışığın neredeyse hiç olmadığı sahnelerde zorluklar sürse de, çerçeve gelecekteki 3B haritalama ve çoklu sensör keşfi için sağlam, gerçek zamanlı sualtı görüsü yönünde pratik bir adım sunuyor.
Atıf: Deluxni, N., Sudhakaran, P., Alroobaea, R. et al. An accurate realtime underwater object segmentation using improved dual-domain YOLOv11-UOS with physics guided adaptive enhancement and attention-boosting. Sci Rep 16, 4804 (2026). https://doi.org/10.1038/s41598-026-35001-x
Anahtar kelimeler: sualtı görüsü, deniz robotikleri, görüntü iyileştirme, nesne segmentasyonu, bilgisayarlı görü