Clear Sky Science · tr
Açıklanabilir Yapay Zeka ve EDA ile V2I yol kaybı tahmini
Neden daha akıllı araç‑yol bağlantıları önemli?
Günümüz otomobilleri çevresindeki yola giderek daha fazla veri gönderip alıyor; trafik ışıkları, yol kenarı birimleri ve diğer altyapılarla kablosuz iletişim kuruyor. Bu bağlantılar güvenlik uyarıları, trafik yönetimi ve gelecekte otonom sürüş için yardımcı oluyor. Ancak kent sokakları kablosuz açısından karmaşık ortamlardır: yüksek binalar, ağaçlar, köprüler ve kamyonlar sinyali zayıflatabilir veya engelleyebilir. Bu makale, sinyal zayıflamasını yalnızca doğru biçimde tahmin etmekle kalmayıp, aynı zamanda bu sistemlere güvenmek zorunda olan mühendisler ve düzenleyiciler için anlaşılır hale getirmenin yollarını gösteriyor.
Modele güvenmeden önce veriyi görmek
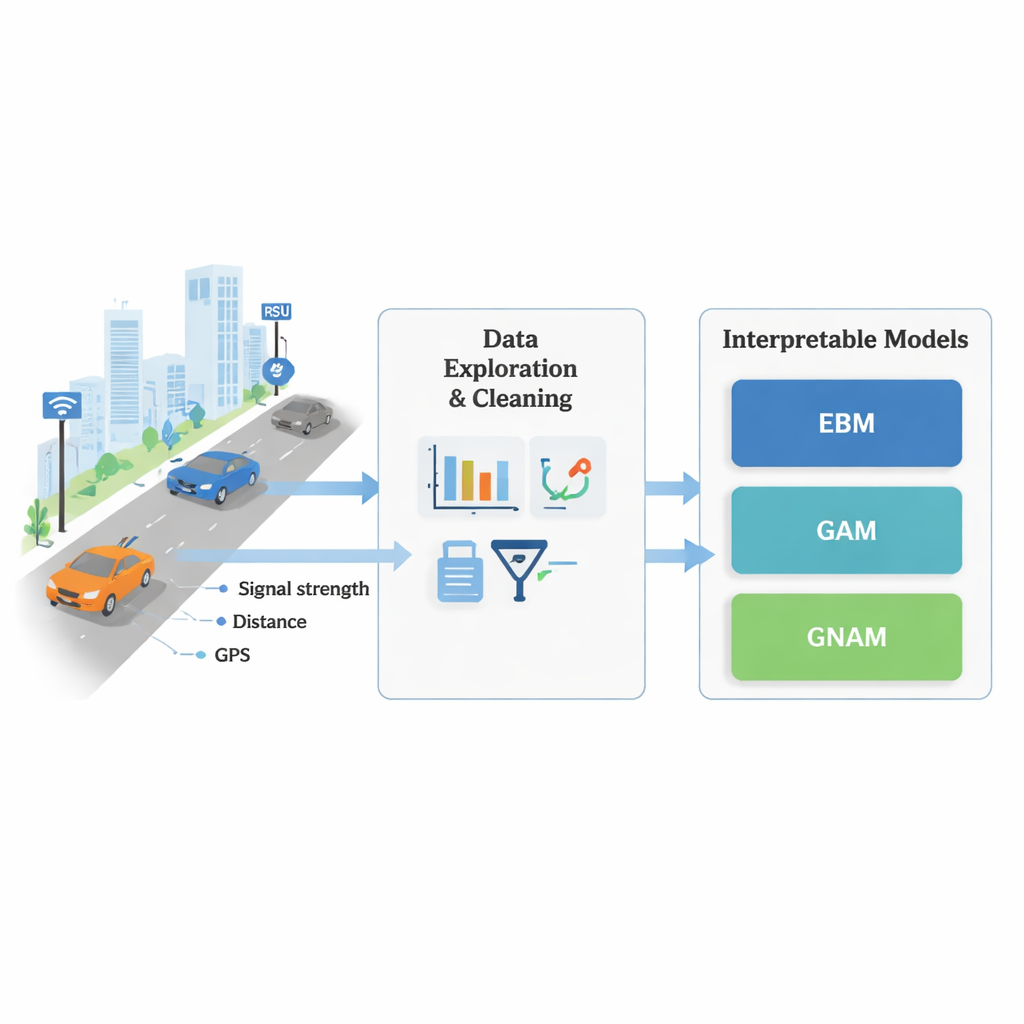
Yazarlar, İtalya’nın Bologna kentinde gerçekleştirilen geniş bir ölçüm kampanyasından başlıyor; antenlerle donatılmış otomobiller 24 farklı kentsel sahnede—düz yollar, kavşaklar, ağaçlı sokaklar, köprüler ve yoğun trafik alanları—sürülürken yol kenarı vericileriyle iletişim kurdu. Bu ölçümlerden, yol kaybı olarak adlandırılan ve sinyalin yol boyunca ne kadar zayıfladığını ölçen bir değer türetiliyor. Herhangi bir tahmin modelini kurmadan önce, yazarlar dikkatli bir keşifsel veri analizi yapıyor: dağılımları çizmek, korelasyonları kontrol etmek ve veriyi açık görüş, engellenmiş görüş ve bitki örtüsü gibi yedi temsilî vaka çalışmasına bölmek. Bu adım, güvenilir tahmin için ele alınması gereken gürültüleri, aykırı değerleri ve gizli desenleri ortaya çıkarıyor.
Gerçek dünya kablosuz kaosunu temizlemek
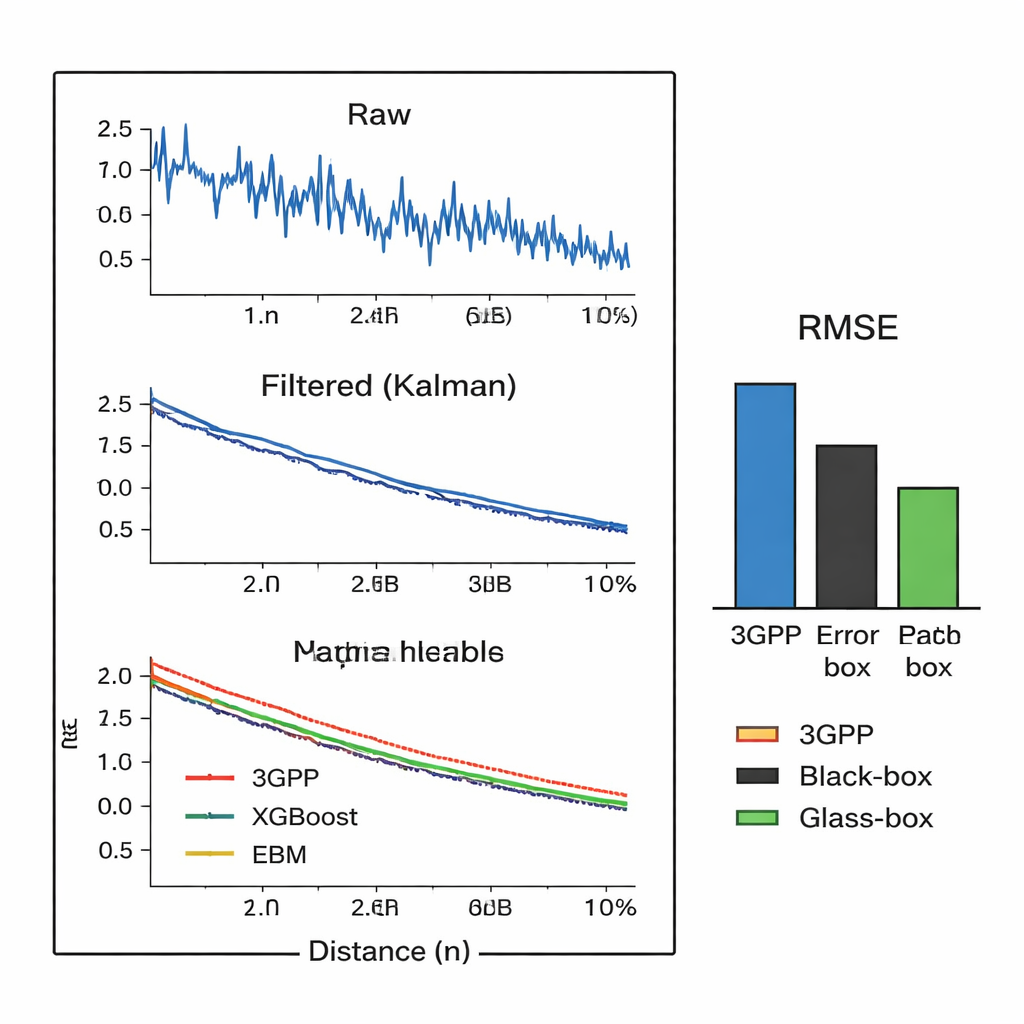
Gerçek dünya kablosuz verileri, ölçüm hatalarından, binalardan yansımalardan ve geçen araçların ani engellemelerinden kaynaklanan düzensizliklerle doludur. Araştırmacılar bu kaosu yatıştırmak için bir ön işleme hattı tasarlıyor. Önce mesafe, aracın konumu ve hızı gibi tüm girdi özelliklerini karşılaştırılabilir hale getirmek için yeniden ölçekliyorlar. Ardından aşırı, tutarsız ölçümleri kırpmak için sağlam istatistiksel bir kural kullanarak aykırı değerleri kaldırıyorlar. Son olarak klasik bir kontrol kuramı aracı olan optimize edilmiş bir Kalman filtresi uygulayarak mesafe boyunca sinyali düzleştirirken alttaki eğilimleri koruyorlar. Filtre parametrelerini, sonraki modellerin performansını maksimize edecek şekilde ayarlayarak, bu temizleme sürecinin tahmin hatalarını yarıdan fazla azaltabileceğini ve modellerin öğrenebileceği kararlı desenleri ortaya çıkarabileceğini gösteriyorlar.
Yapay zekanın kara kutusunu açmak
3GPP ve çift eğimli modeller gibi geleneksel kablosuz planlama formülleri basit ve şeffaftır ama yoğun şehirlerin karmaşıklığını yakalamakta sıklıkla yetersiz kalır. Öte yandan rastgele ormanlar ve XGBoost gibi popüler makine öğrenimi yöntemleri yüksek doğruluk sunar fakat nedenini açıklamakta siyah kutu davranışı sergiler. Bu makale, yorumlanabilirliği korurken doğrusal olmayan davranışı da yakalayabilen “cam-kutu” modellerine odaklanıyor. Yazarlar, Explainable Boosting Machines, Genelleştirilmiş Toplamlı Modeller ve Genelleştirilmiş Sinirsel Toplamlı Modeller olmak üzere üç bu tür modeli; standart kara-kutu algoritmalar ve klasik formüllerle birlikte, tüm senaryolarda katı eğitim–test bölmeleri ve 5 katlı çapraz doğrulama kullanarak test ediyorlar.
Gerçek yollarda sinyal kaybını ne etkiliyor?
Temizlenmiş verileri yorumlanabilir modellerle birleştirerek yazarlar, şehirlerde yol kaybı için en önemli etkenleri belirleyebiliyor. Araba ile yol kenarı birimi arasındaki mesafe beklenen şekilde baskın etken, ancak aracın kesin GPS koordinatları ve zaman da sokak düzeni ile trafik desenlerinin kanalı nasıl şekillendirdiğini yansıtarak katkıda bulunuyor. Binaların arkasındaki NLOS (görüş hattı olmayan) bölgeler, köprü altları, ağaç örtüleri veya ağır kamyon trafiği gibi karmaşık sahnelerde cam-kutu modeller doğruluk açısından en iyi kara-kutu modellerine eşdeğer veya biraz gerisinde kalsa da, her bir faktörün tahmini nasıl yukarı veya aşağı ittiğini açıkça gösteriyor. Çalışma ayrıca hesaplama zamanı ve enerji kullanımını değerlendiriyor ve bu yorumlanabilir modellerin yol kenarı birimleri ve araç içi cihazlarda gerçek zamanlı konuşlandırma için yeterince hızlı ve hafif olduğunu sonucuna varıyor.
Daha güvenli, daha şeffaf araç ağları inşa etmek
Gündelik okuyucu için ana mesaj, yoğun şehirlerde bir aracın yoldan ne kadar iyi sinyal alacağını artık hem doğrulukla hem de açıklıkla tahmin edebiliyor olmamızdır. Kimsenin tamamen anlamadığı opak yapay zekaya güvenmek yerine, bu çerçeve veri keşfi, gürültü filtreleme ve açıklanabilir modeller kullanarak neredeyse en iyi düzeyde doğruluk sunarken hangi faktörlerin önemli olduğunu tam olarak gösteriyor. Bu şeffaflık, mühendislerin, düzenleyicilerin ve hatta mahkemelerin kararları denetlemesi gerekebilecek güvenlik açısından kritik Vehicle‑to‑Everything sistemleri için hayati öneme sahip. Çalışma, yalnızca hızlı ve güvenilir değil, aynı zamanda hesap verebilir ve tasarım, test ve güven oluşturması daha kolay olacak geleceğin 5G/6G araç‑yol ağlarına doğru bir yol öneriyor.
Atıf: Ameur, M.B., Chebil, J., Habaebi, M.H. et al. Explainable AI with EDA for V2I path loss prediction. Sci Rep 16, 4954 (2026). https://doi.org/10.1038/s41598-026-34987-8
Anahtar kelimeler: araçtan-altyapıya, yol kaybı tahmini, açıklanabilir yapay zeka, kablosuz kanallar, 5G V2X