Clear Sky Science · tr
Demiryolu taşımacılığı için uzun menzilli LiDAR–kamera dışsal kalibrasyon yöntemi
Trenleri Uzaktan Güvende Tutmak
Modern sürücüsüz trenler, insanın görmesinden çok daha önce raylardaki engelleri izlemek için elektronik “gözlere” dayanır. En önemli gözlerden ikisi, dünyayı farklı biçimlerde algılayan kameralar ve LiDAR adı verilen lazer tarayıcılardır. Birlikte çalışabilmeleri için büyük hassasiyetle hizalanmaları gerekir; bu görev, yüzlerce metre uzaklıktaki rayları izlerken şaşırtıcı derecede zorlaşır. Bu çalışma, sensörleri uzun mesafede güvenilir biçimde koruma sağlayabilecek şekilde hizalamanın yeni bir yolunu sunar.
Neden Sensör Hizalaması Önemli
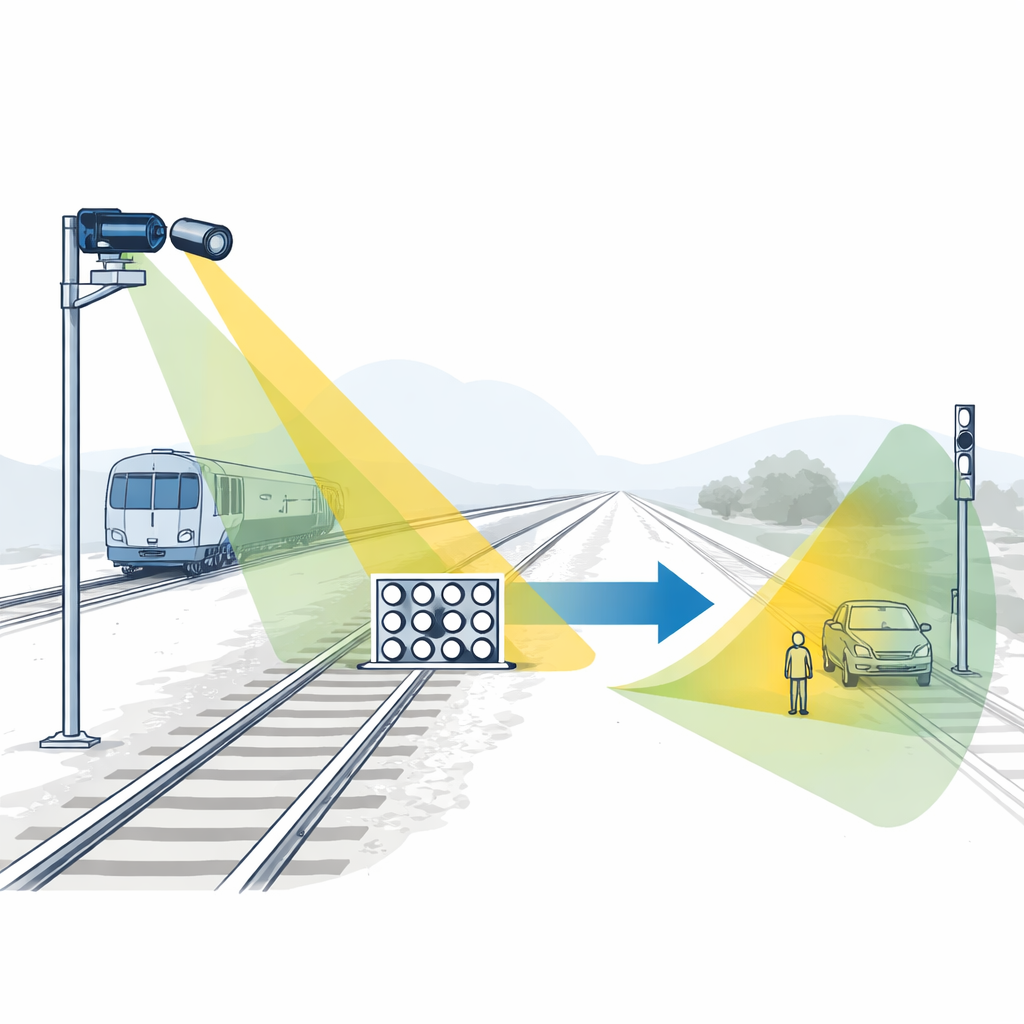
Özerk bir trende kameralar ayrıntılı renkli görüntüler yakalarken LiDAR, ışık darbeleri gönderip geri dönüş sürelerini ölçerek mesafe tayini yapar. Bu iki görüntünün birleştirilmesi, sistemin hem bir geçitte sıkışmış bir aracı hem de raylardaki enkazı gibi ray bölgesine müdahale edebilecek nesneleri tespit edip izleyebilmesini sağlar. Ancak füzyon, kamera ile LiDAR arasındaki konum ilişkisi tam olarak biliniyorsa işe yarar. Küçük bir hizalama hatası, uzak mesafelerde tespit edilen bir engeli onlarca santimetre—hatta metre—yanıltabilir; bu da otomatik koruma sistemlerini yavaşlatabilir veya güvenilirliğini düşürebilir.
Rayda Uzağı Görmenin Zorluğu
Demiryolu uygulamalarında mühendisler genellikle kameranın yüzlerce metre uzaktaki nesneleri net görmesi için telefoto lensler kullanırlar. Ancak bu menzillerde, herhangi bir kalibrasyon hedefinden gelen LiDAR dönüşleri çok seyrekleşir: sensörleri hizalamak için kullanılan tahta üzerine yalnızca birkaç lazer noktası düşer. Mevcut çoğu hizalama tekniği, yoğun bir LiDAR nokta bulutu veya sahnede zengin kenarlar varsayar; bu koşullar uzun menzilde geçerli değildir. Sonuç olarak, 2D görüntü ile 3D nokta bulutu arasında güvenli tren kontrolünü destekleyecek doğrulukta eşleşen özellikleri bulmak zorlaşır.
Daha Akıllı Bir Kalibrasyon Tahtası
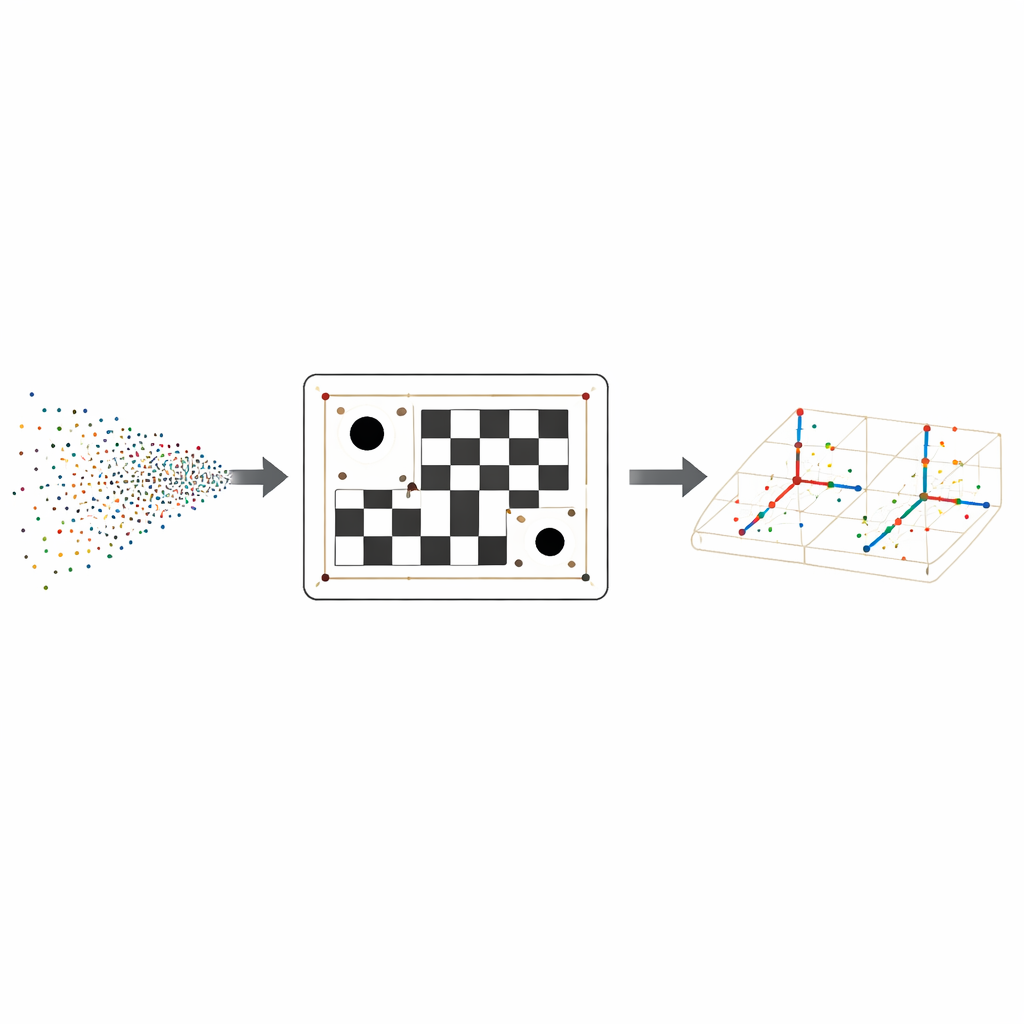
Bunu aşmak için yazarlar, tanıdık bir siyah–beyaz kareli desen ile merkezleri düzensiz bir üçgen oluşturan üç dairesel delik içeren özel bir kalibrasyon tahtası tasarlar. Kareli desen, kamera görüntüsünde birçok hassas köşe noktası sağlarken delikler, LiDAR için uzaktan bile yuvarlak kenarları kolayca tespit edilebilen güçlü geometrik ipuçları oluşturur. Üç deliğin asimetrik bir üçgen oluşturacak şekilde yerleştirilmesi, tahtanın uzaydaki yöneliminin yansıtılmış veya döndürülmüş görünümlerden kaynaklanacak belirsizlikleri önleyerek kesin olarak belirlenmesini sağlar.
Seyrek Noktaları Güvenilir Eşleşmelere Çevirme
LiDAR tarafında yöntem önce nokta bulutunu temizler ve tahtayı temsil eden düz bir düzlem uyarlar. Ardından noktaları bu düzleme projekte eder ve her deliğin merkezini bulmak için sağlam bir çember uyarlama prosedürü kullanır; merkezlerin konumlarını delikler arasındaki bilinen fiziksel mesafeleri dayatarak rafine eder. Delik merkezleri üçgeni belirlendikten sonra algoritma tahtanın üzerinde yerel bir koordinat ızgarası oluşturur, her bir kare köşesinin 3B’de nerede olması gerektiğini öngörür ve çevredeki LiDAR noktalarını doğru parlaklık ya da yansıtıcılık değerleri açısından kontrol eder. Geometri ile yansıtıcılığın bu birleşimi, birkaç dağınık dönüşü kameranın 2B köşeleriyle eşleşen güvenilir bir 3B köşe kümesine dönüştürür.
Sensör İlişkisinin İnceltilmesi
Aynı fiziksel köşeler hem kamera görüntüsünde hem LiDAR bulutunda belirlendikten sonra, yazarlar iki sensörü birbirine bağlayan kesin dönüşüm (rotasyon ve öteleme) parametrelerini çözer. LiDAR noktalarının görüntüde düştüğü yer ile kameranın gerçekten köşeleri gördüğü yer arasındaki farkı azaltmak için bu ilişkiyi yineleyen bir optimizasyon tekniği kullanırlar. Orta ile güçlü telefoto lenslere kadar farklı kamera lensleriyle gerçek bir ray platformunda yapılan testler, yeni yöntemin projeksiyon hatalarını tutarlı biçimde yaklaşık bir piksel veya daha azda tuttuğunu ve özellikle veri en kıt olduğu en uzun odak uzaklıklarında birkaç tanınmış alternatife göre daha iyi performans gösterdiğini ortaya koyar.
Demiryolu Güvenliği İçin Anlamı
Günlük terimlerle bu çalışma, özerk bir trende kamera ile LiDAR’a “buradasınız ve tam olarak bu yönde bakıyorsunuz” demenin daha güvenilir bir yolunu sunar. Kalibrasyon tahtasını yeniden tasarlayarak ve seyrek LiDAR verilerinin akıllı işlenmesini ekleyerek, yöntem sensörler sahneleri yüzlerce metre öteden izleseler bile yüksek doğruluğu korur. Bu daha sıkı hizalama, füzyonlu sistemin engelleri 3B uzayda daha kesin yerleştirmesini sağlayarak demiryolu taşımacılığının daha güvenli olmasının ve gerçek dünyada çoklu sensör algısının daha güvenilir olmasının teknolojik temelini güçlendirir.
Atıf: Liu, X., Wang, H., Ruan, S. et al. A long-range LiDAR–camera extrinsic calibration method for rail transit. Sci Rep 16, 8018 (2026). https://doi.org/10.1038/s41598-025-34547-6
Anahtar kelimeler: demiryolu taşımacılığı güvenliği, LiDAR kamera füzyonu, sensör kalibrasyonu, özerk trenler, uzun menzilli algılama