Clear Sky Science · tr
Doğrudan sistem kalibrasyonu ve zayıf lazer hattı çıkarımı kullanarak sığ deniz yapıların 3B yeniden yapılandırılması
Gizli Su Altı Dünyalarını Görünür Kılmak
Geçmişimizin en ilgi çekici izlerinin birçoğu artık su altında—gemi enkazları, sular altında kalmış şehirler ve kıyı kalıntıları. Bu alanları dijital olarak keşfetmek ve korumak için araştırmacıların deniz tabanında ne olduğunu gösteren doğru 3B haritalara ihtiyacı var. Ancak sığ sularda parlak güneş ışığı, yüzeyde sürüklenen kum ve suyun kendisi hassas ölçümleri beklenmedik şekilde zorlaştırır. Bu makale, mevcut yöntemlerin büyük ölçüde başarısız olduğu güneşli, gürültülü koşullarda bile düşük güçlü mavi bir lazer kullanarak su altı yapıların ayrıntılı 3B modellerini taramak ve yeniden yapılandırmak için yeni bir yaklaşım sunuyor.
Sığ Denizleri Taramanın Neden Bu Kadar Zor Olduğu
Bir sahnenin dijital 3B modelini oluşturmak genellikle uzayda milyonlarca noktanın bir araya getirilmesi anlamına gelir—bilim insanlarının nokta bulutu dediği şey. Kara üzerinde lazerler ve kameralar bunu güvenilir şekilde yapar. Ancak su altında işler karışır. Su ışığı büker ve saçılır, sahneleri mavi-yeşil bir pusla kaplar ve kenarları bulanıklaştırır. Dalgalar arasından geçen güneş ışığı, ince bir lazer çizgisini boğabilecek parlak hareketli desenler olan kaustikler oluşturur. Mikroskobik parçacıklar bir sis perdesi ve titreyen yansımalar ekler. Sonuç olarak, birçok güncel su altı sistemi yalnızca gece, çok düşük ışıkta veya dikkatle kontrol edilen koşullarda çalışır—gerçek okyanusların davranışı bu değildir.
3B Bir Boya Fırçası Gibi Dönen Mavi Lazer
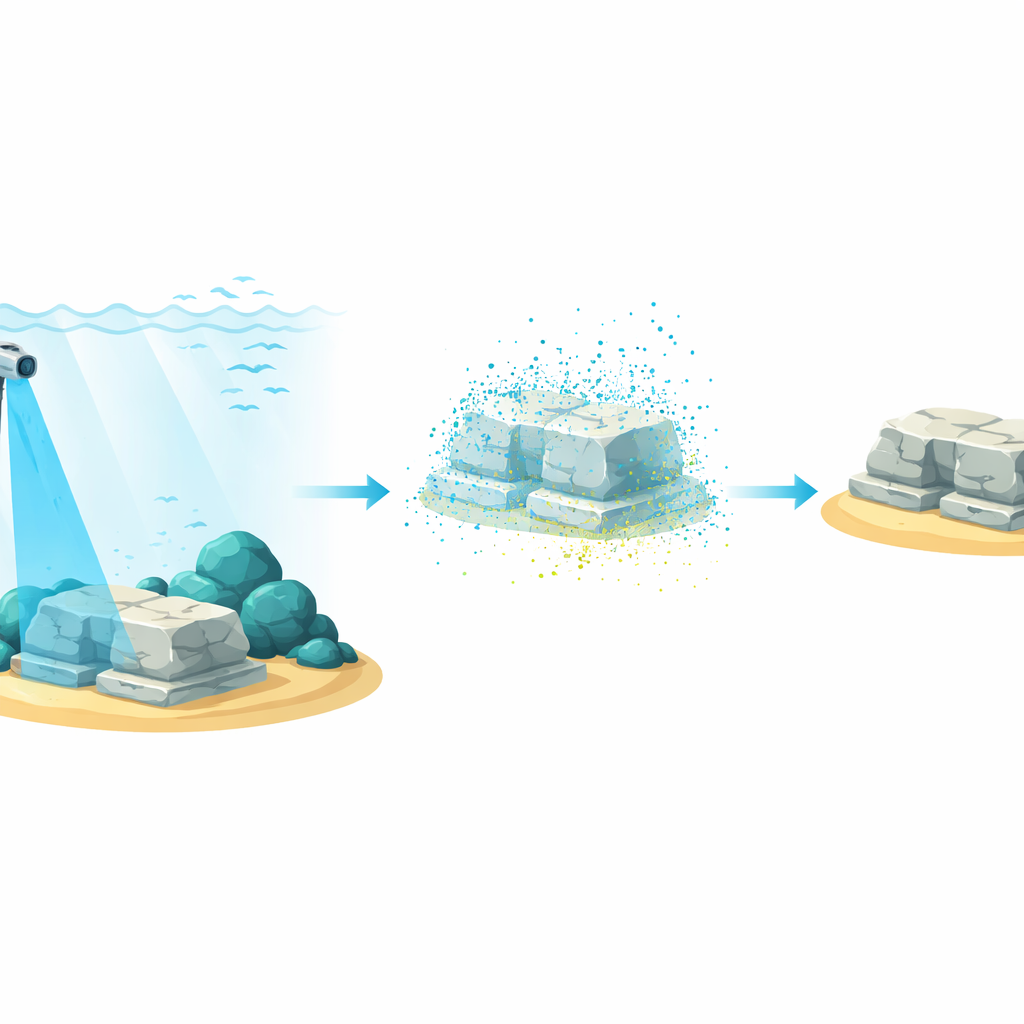
Yazarlar, 3B bir boya fırçası gibi davranan kompakt, su geçirmez bir tarayıcı geliştirdiler. Cihazın kolu yavaşça dönerken etrafı tarayan ince dikey bir mavi lazer ışık tabakası projeksiyonu yapar. Bu tabaka bir kayaya, duvara veya esere değdiği yerde parlayan bir eğri çizer. Lazere bitişik olarak monte edilmiş bir kamera, her küçük dönüş adımında görüntüler yakalar. Tüm bu görünümler birleştirilerek, sistem çevrenin yoğun bir 3B nokta bulutunu, yaklaşık renk bilgisiyle birlikte yeniden oluşturabilir; bu daha sonra görselleştirme veya sanal gerçeklik için yüzey ağına dönüştürülebilir.
Sisteme Her Pikselin Uzayda Nerede Olduğunu Öğretmek
Bu tür sistemlerde merkezi bir zorluk kalibrasyondur: her kamera pikselinin gerçek dünya koordinatlarıyla nasıl hizalandığını bulmak. Geleneksel yaklaşımlar kamera ve suyun ayrıntılı matematiksel modellerine, ayarlanması gereken onlarca parametreye dayanır; bu da onları kırılgan ve hata eğilimli yapar. Burada araştırmacılar veri merkezli bir yol izliyor. Bilinen bir ızgarayla kaplı bir duvarı tarayarak görüntü piksellerinden 3B konumlara doğrudan bir eşleme öğreniyorlar. Sadece birkaç yüz dikkatle seçilmiş örnek nokta yeterli. Bir arama tablosunda saklandıktan sonra bu harita, tarayıcının tespit edilen herhangi bir lazer pikselini karmaşık kamera denklemlerini açıkça çözmeden 3B noktaya dönüştürmesini sağlıyor.
Zayıf Bir Mavi İzini Düzeltmek ve Güçlendirmek
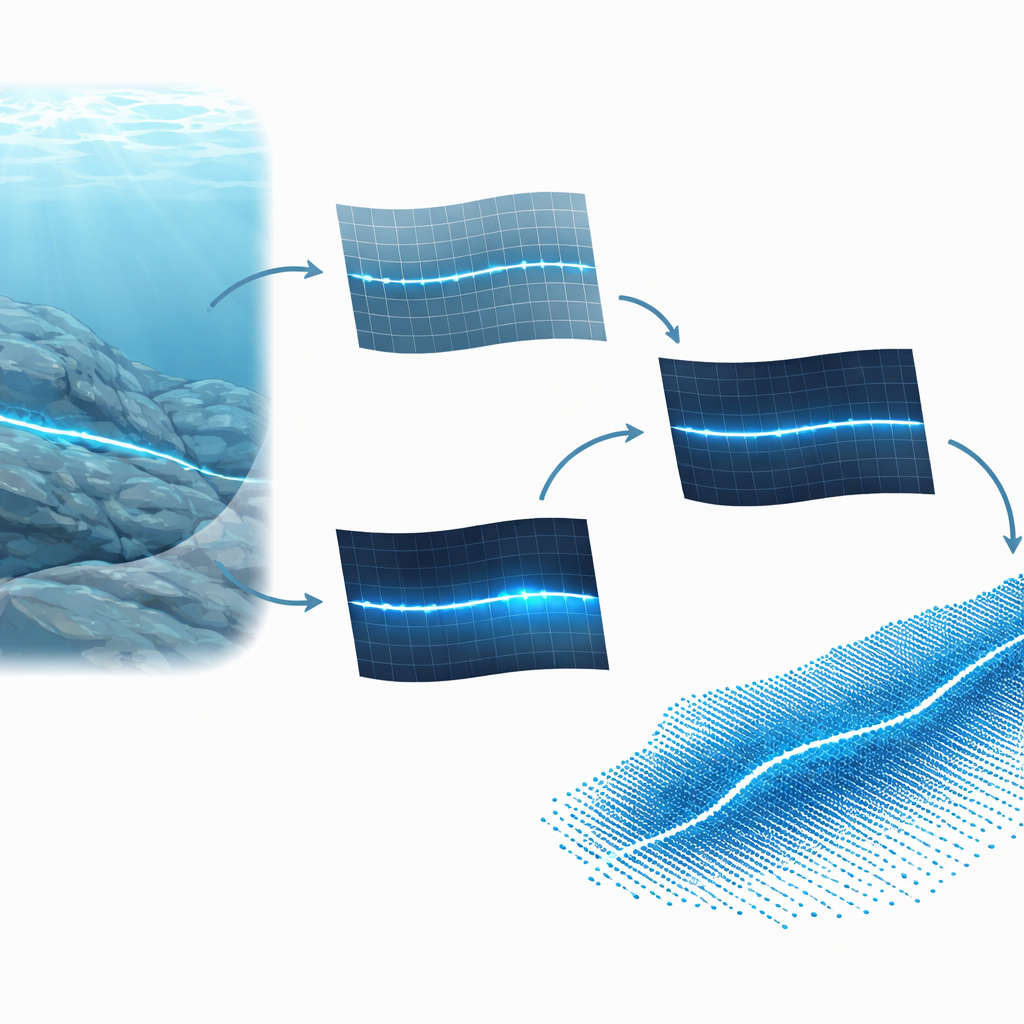
Kalibrasyon havada yapıldığı için, su altı kayıtları önce su yüzeyindeki kırılmanın neden olduğu bükülmeyi geri almak için "düzeltilmelidir". Ekip, hava ve suyu kapsayan bir ızgaran görüntülerini kullanarak bu bozulmayı ölçer, ardından her su altı pikselinin havada görüldüğünde nasıl kayacağını hesaplar. Bu düzeltmeden sonra asıl hile başlar: gürültülü bir görüntüdeki genellikle kopuk zayıf mavi çizgiyi bulmak. Yöntem ilk olarak her piksel için bir "mavimsi" değer hesaplar; böylece lazerin mavi tonu yakınındaki ışık öne çıkar. Sonra her pikselin komşularına göre ne kadar daha mavi olduğunu inceler ve muhtemel lazer piksellerinin kaba siyah-beyaz haritasını oluşturmak için bir makine öğrenimi sınıflandırıcısı kullanır.
Gürültülü Noktalardan Temiz 3B Şekillere
O ilk harita hâlâ kum, yansımalar ve kaustiklerden kaynaklanan birçok yanlış tespit içerir. Bunu temizlemek için sistem, klasik bir teknik kullanarak piksel pozisyonlarına dayalı olası çizgilere oy veren düz çizgi desenleri arar. Sadece lazerin beklenen yönelimiyle eşleşen çizgileri tutar. Kalan noktalar boyunca düz bir eğri uydurulur ve her pikselin "güveni", bu eğriye yakınsa ve yüksek mavimsi değere sahipse artırılır. Görüntünün her satırı için en yüksek güvene sahip piksel nihai lazer izi parçası olarak seçilir. Bu temizlenmiş izler adım adım kalibrasyon tablosuna beslenerek, orijinal kamera görüntüsünden renklendirilmiş bir 3B nokta bulutu üretir.
Gerçek Suda Ne Kadar İyi Çalışıyor?
Yazarlar sistemlerini tanklarda ve yaklaşık beş metre derinlikteki sığ bir denizde, loş iç mekan seviyelerinden on binlerce lukse varan yoğun öğle güneşine kadar değişen aydınlatma altında test etti. Boyutu hassas biçimde bilinen bir top ve özel akrilik bir şekil gibi nesneleri taradılar ve ölçülen boyutları gerçek değerlerle karşılaştırdılar. Yaklaşık yarım metreye kadar olan mesafelerde tipik hata parlak ışık altında bile milimetrenin altında kaldı; lazer çizgisi gözle neredeyse görünmez olana dek daha büyük mesafelerde birkaç onda milimetre içinde sürdü. Karanlık koşullar için tasarlanmış mevcut yöntemler bu daha yüksek ışık seviyelerinde sahneleri hiç yeniden oluşturamadı.
Su Altı Alanları Keşfetmek İçin Bunun Anlamı
Özünde bu çalışma, sığ sualtı yapıların doğru 3B haritalanmasının hantal, yüksek güçlü lazerler veya kusursuz kontrol edilmiş karanlık gerektirmediğini gösteriyor. Suyun ışığı bükmesini dikkatle düzelterek, lazerin rengini vurgulayarak ve pikselleri gerçek dünya konumlarına bağlayan doğrudan bir kalibrasyon kullanarak sistem, gürültülü, güneşli sahnelerden zayıf bir mavi izi güvenilir şekilde çekebiliyor. Aşırı parlak koşullarda ve bazı nesne renklerinde performans düşse de bu yaklaşım resiflerin, liman duvarlarının ve batık kalıntıların daha rutin, düşük maliyetli taranmasının yolunu açıyor; bu da bilim insanları ve korumacıların su altı dünyalarının sadık dijital kopyalarını oluşturmalarına yardımcı olacak.
Atıf: Garai, A., Kumar, S. 3D reconstruction of shallow sea structures using direct system calibration and faint laser line extraction. Sci Rep 16, 9321 (2026). https://doi.org/10.1038/s41598-025-25736-4
Anahtar kelimeler: su altı 3B tarama, lazer hattı yeniden yapılandırma, sığ deniz haritalama, nokta bulutu görüntüleme, su altı arkeolojisi