Clear Sky Science · tr
Sabit kanatlı insansız hava sistemlerinde makine öğrenimi ve akıllı yörünge optimizasyonu için açık bir ölçüt veri kümesi
Neden Daha Akıllı Drone Uçuşları Önemli?
Tarla incelemelerinden arama-kurtarmaya kadar, sabit kanatlı drone’lar hızla başımızın üstünde artan oranda görev üstleniyor. Bu uçakları daha güvenilir ve insan pilotlara daha az bağımlı hâle getirmek, daha güvenli teslimatlar, daha keskin çevresel izleme ve acil durumlar veya çatışma bölgelerinde daha dayanıklı operasyonlar sağlamayı mümkün kılabilir. Ancak ilerleme giderek parlak fikirlerden çok gerçek dünya verisinin eksikliğiyle sınırlanıyor. Bu makale, mühendislerin ve öğrencilerin aynı zengin, paylaşılmış temel üzerinde daha akıllı uçuş algoritmaları geliştirmesi ve test etmesi için tasarlanmış yüzlerce özerk drone uçuşunu içeren yeni bir açık veri kümesini tanıtıyor.
Gerçek Dünya Görevleri İçin Uçan Bir Laboratuvar
Yazarlar veri kümelerini Volantex Ranger 2400 adı verilen sağlam, motorlu planör tarzı bir uçak kullanarak oluşturdu. İki buçuk metrelik kanat açıklığı, verimli kanat profili ve geniş gövdesi sayesinde uçak, modern elektroniği taşıyabilir ve uzun, stabil görevlerde havada kalabilir. Arkaya monte elektrikli bir motor ve ani güç patlamalarından ziyade dayanıklılık için ayarlanmış özel bir lityum‑iyon batarya paketi ile güçlendirilmiştir. Ekip bu platformu tamamen özerk modda uçurdu; kalkış, düz seyir bacakları, sık dönüşler, dinamik manevralar ve otomatik inişler gibi uçuşun kilit aşamalarını kapsayan önceden planlanmış rotalar kullanıldı. Bu kontrollü ama gerçekçi düzenek, Ranger’ı sivil ve savunma kullanımlarında kullanılan küçük operasyonel drone’lar gibi davranan uçan bir laboratuvara dönüştürüyor.
İki Beyin, Tek Uçak
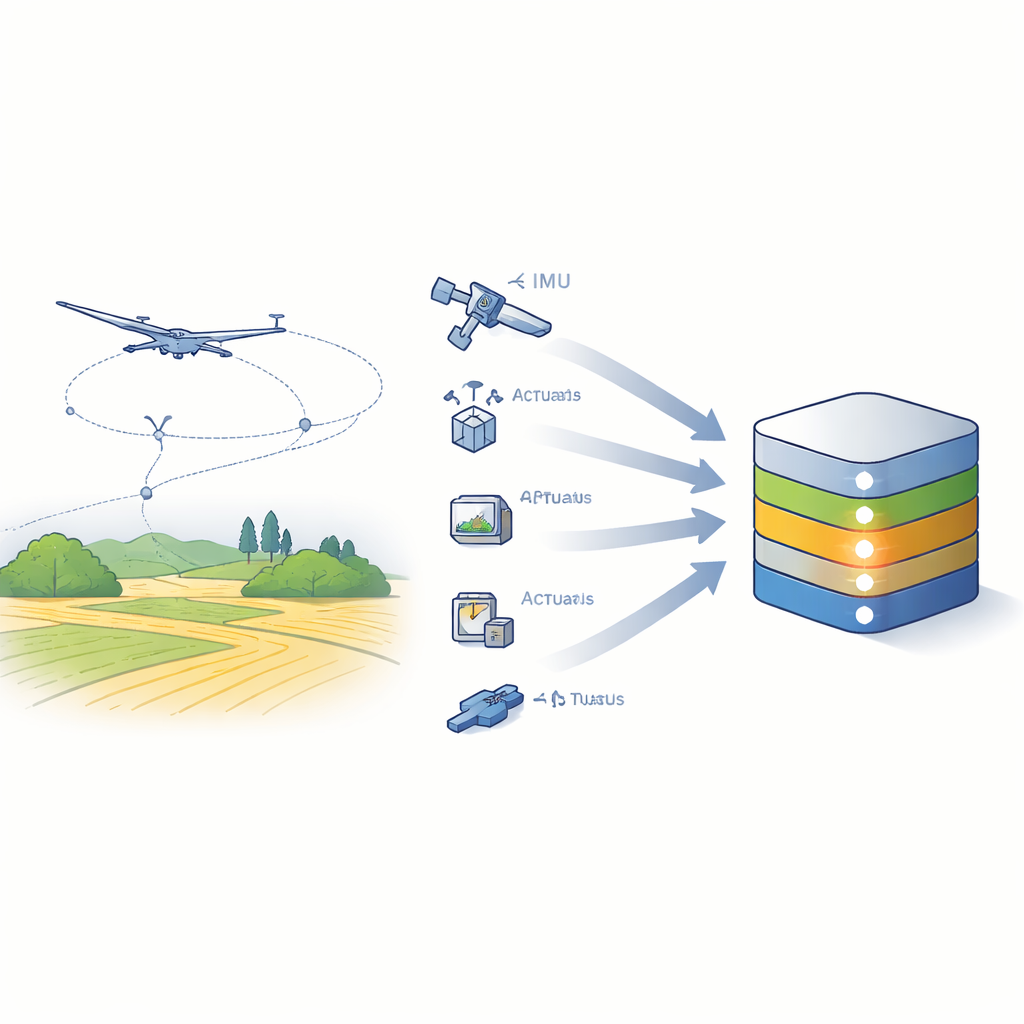
Geniş bir kullanım yelpazesini yakalamak için araştırmacılar aynı hava platformunu iki çok farklı “beyin” ile donattı. Bir yapılandırma, hobi kullanıcılarının ev yapımı drone’larına koyabileceği elektroniğe benzer, kompakt ve uygun maliyetli bir SpeedyBee F405 uçuş kontrolcüsü kullanıyor. Diğeri ise talepkar yapay zeka yazılımlarını yerinde çalıştırabilecek güçlü Jetson Orin NX bilgisayarıyla birlikte profesyonel bir Pixhawk 6X otopilotu birleştiriyor. Her iki sistem de atalet sensörlerinden gelen hareket, GPS konumu ve hızı, irtifa, hava hızı, kumanda yüzeyi komutları, batarya durumu ve uçuş modu gibi ayrıntılı telemetriyi, uçağın hareketini ince ayrıntısıyla yeniden oluşturabilecek kadar yüksek oranlarda kaydediyor. Elektroniği değiştirirken hava platformunu sabit tutarak, veri kümesi yerleşik hesaplama ve algılamanın farklı düzeylerinin uçuş davranışı üzerindeki etkilerini incelemeye imkân veriyor.
Veri Kümesinin İçindekiler
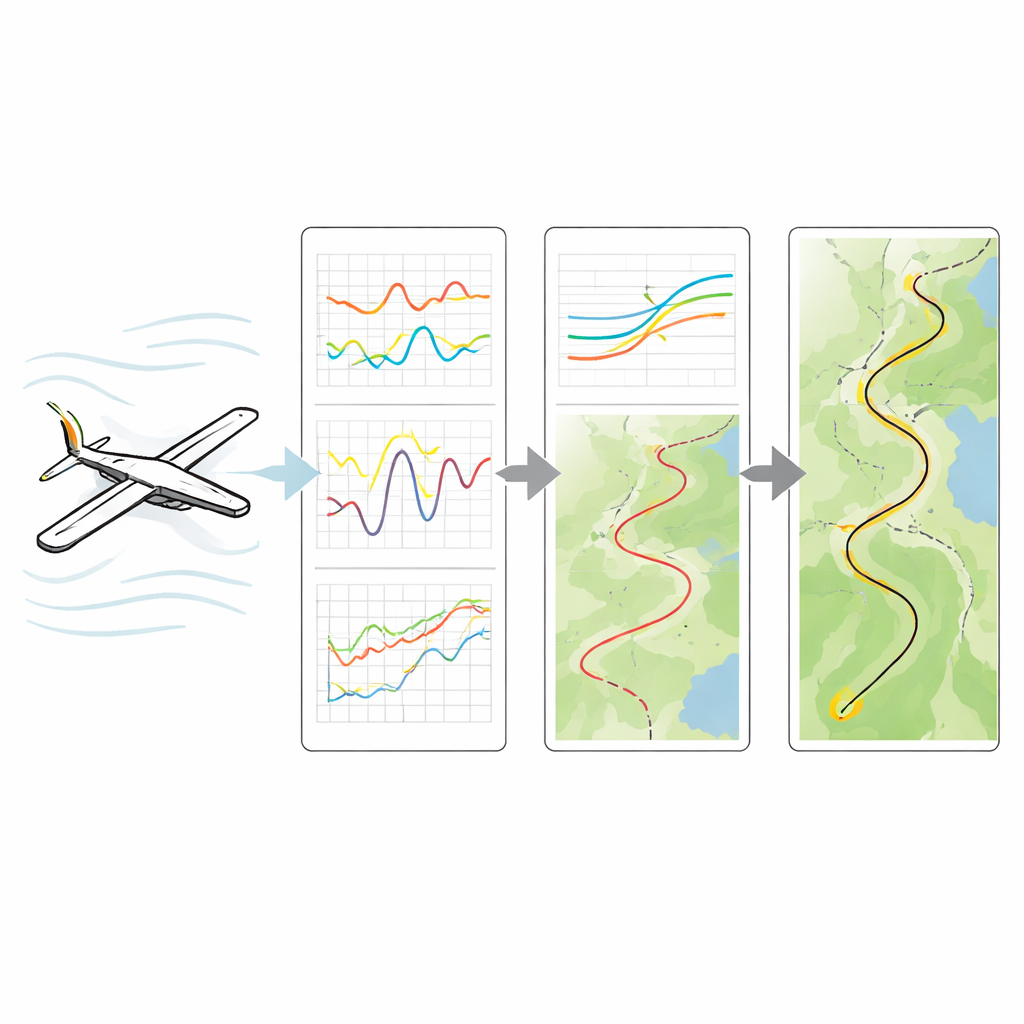
Ortaya çıkan IDF‑DS koleksiyonu 240 özerk uçuş, yaklaşık 32 saat uçuş süresi ve on milyonlarca kaydedilmiş örnekten oluşuyor. Her uçuş, kullanıcıların ana günlük, görev planı, kontrolör ayarları ve görüntülemeye hazır bir GPS izi gibi öğeleri hızla bulabilmesi için tutarlı bir klasör yapısıyla saklanır. Görevlerden bir grubu dikdörtgen bir tarlanın üzerinde zikzak desenini takip eder; bu, tekrarlanabilir karşılaştırmalar veya öngörücü modellerin eğitimi için idealdir. Bir diğeri ünlü bir MotoGP pistinden esinlenen pist‑benzeri bir döngü izler; keskin virajlar, geniş eğriler ve otopilotu zorlayan düz segmentler içerir. Her yapılandırma ve görev için günlükler, uçağın nasıl uçması gerektiğini değil, gerçekte nasıl uçtuğunu yakalar.
Ham Uçuşları İçgörülere Dönüştürmek
Bu zenginlikten neler yapılabileceğini göstermek için yazarlar birkaç örnek analiz üzerinden gidiyor. Yerleşik hareket sensörlerinin kalitesini, GPS tabanlı yörüngeden çıkarılan ivmelenmeler ve dönüşlerle karşılaştırarak kontrol ediyorlar; ölçümlerin modelleri eğitmek için “yer gerçeği” olarak kullanılabilecek kadar güvenilir olduğunu doğruluyorlar. Otopilotun üç yönde hızı ne kadar iyi tahmin ettiğini, uçağın planlanan yolu ne kadar yakından takip ettiğini ve tırmanışlar, dönüşler ve sabit seyir sırasında ne kadar elektrik gücü çektiğini inceliyorlar. Hava hızı, yerde hız ve duruşu birleştirerek, uçağın rotası boyunca yaşadığı rüzgârı bile yeniden yapılandırıyorlar; bu, yalnızca yerleşik okumalardan esinti ve yan rüzgârların bir resmini oluşturuyor. Bir diğer kullanım örneği, aynı veri akışlarının uydu navigasyonunun kullanılamadığı durumlarda konumu tahmin edecek bir yapay zeka modelini nasıl eğitebileceğini özetliyor.
Bu Kaynak Gelecek Uçuşlara Nasıl Yardımcı Olur?
Günlük ifadeyle bu çalışma, topluluğa herkesin açabileceği yüzlerce uçuştan oluşan paylaşılan bir “kara kutu” sunmakla ilgili. Her ekibin kendi pahalı test verisini toplaması ve bunları gizli tutması yerine—araştırmacılar ve öğrenciler bu açık veri kümesini indirip GPS başarısız olduğunda drone’ları rotada tutmanın, arızaları tehlikeli hâle gelmeden önce tespit etmenin veya daha verimli yollar seçerek batarya ömrünü uzatmanın yeni yollarını hemen keşfetmeye başlayabilirler. Makalenin kendisi bu akıllı sistemleri inşa etmiyor; onların gerektirdiği temeli inşa ediyor. Okuyucular için çıkarılacak ders, hava özerkliğindeki ilerlemenin artık zekâ algoritmaları kadar açık, dikkatle belgelenmiş uçuş kayıtlarına da bağlı olduğudur—ve bu veri kümesi o geleceğe yönelik önemli bir adımdır.
Atıf: García-Gascón, C., Bas-Bolufer, J., Castelló-Pedrero, P. et al. An open benchmark dataset for machine learning and intelligent trajectory optimization in fixed-wing unmanned aerial systems. Sci Data 13, 364 (2026). https://doi.org/10.1038/s41597-026-06716-3
Anahtar kelimeler: sabit kanatlı drone’lar, uçuş telemetresi, özerk navigasyon, makine öğrenimi veri kümesi, yörünge optimizasyonu