Clear Sky Science · tr
Büyük ölçekli eşzamanlı 4B görüntüleme sensörü
Dünyayı Dört Boyutta Görmek
Sürücüsüz arabalar, teslimat dronları ve artırılmış gerçeklik başlıkları, çevrelerindeki 3B dünyayı gerçek zamanlı olarak anlayabilen makinelere dayanır. Günümüzde bu tür bir görme genellikle hantal, pahalı veya enerji tüketimi yüksek olur. Bu makale, sahnenin şeklini 3B olarak haritalamanın ötesinde nesnelerin nasıl hareket ettiğini de ölçebilen, çip boyutunda bir sensör olan “4B kamera”ya doğru atılmış büyük bir adımı bildiriyor; bu, robotlardan akıllı telefonlara kadar birçok alana kompakt makine görüşü getirebilir.
Düz Fotoğraflardan Canlı Haritalara
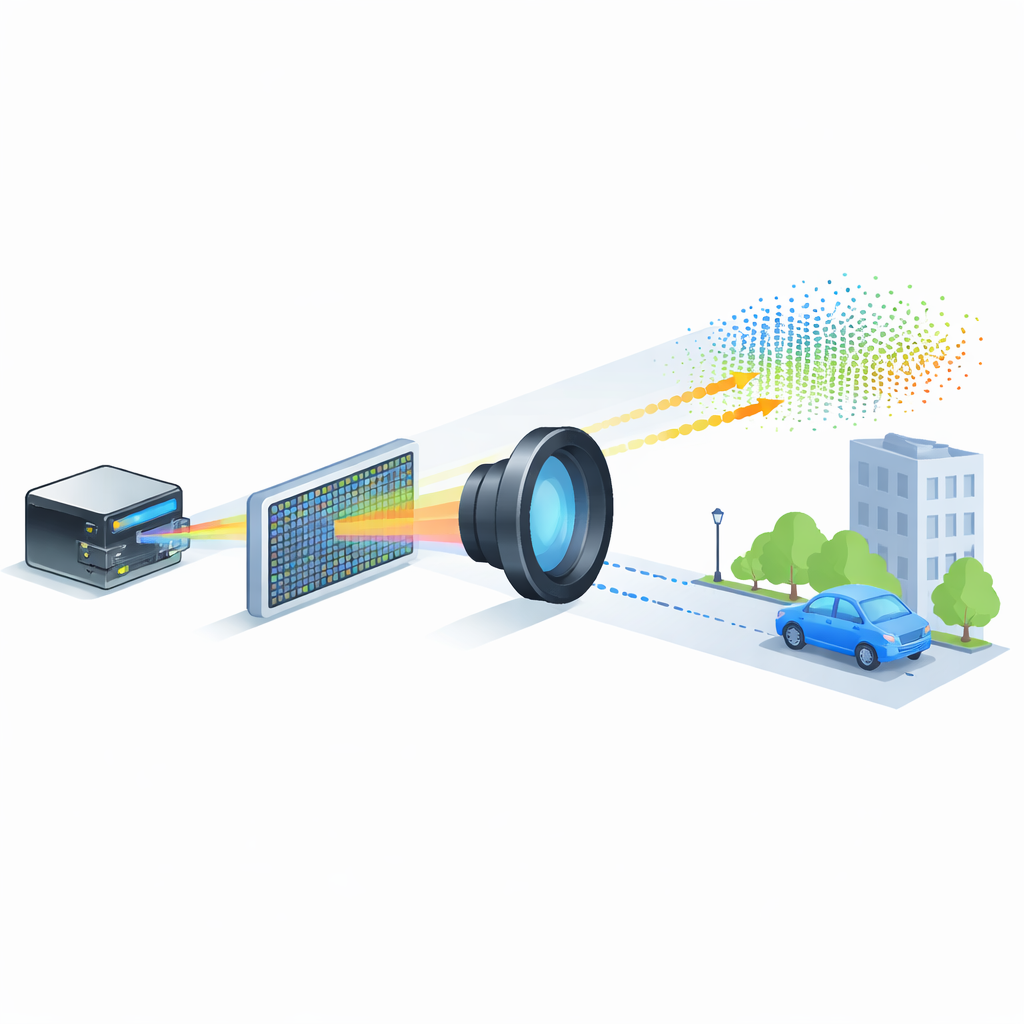
Geleneksel kameralar düz bir yüzeyde ışık yoğunluğunu yakalar; güzel 2B görüntüler üretirler ama mesafe hakkında doğrudan bilgi vermezler. Buna karşın ışık algılama ve menzil ölçme (LiDAR) sistemleri lazer darbeleri gönderir ve geri dönmelerinin ne kadar sürdüğünü zamanlayarak çevrenin 3B haritasını oluşturur. Mevcut yaklaşımlar uzakları ve yüksek ayrıntıyı görebilir, ancak genellikle hareketli parçalara, büyük optiklere veya ölçülen nokta başına yüksek enerjiye ihtiyaç duyarlar. Bu, sokakları, endüstriyel sahaları veya kalabalık odaları inceleyebilen, akıllı telefon kamerası kadar küçük, ucuz ve dayanıklı bir şey inşa etmeyi zorlaştırır.
Mesafeyi ve Hareketi Ölçen Bir Çip
Araştırmacılar, temelde dijital kameralardaki görüntüleme çipinin LiDAR versiyonu olan yeni bir LiDAR odak düzlemi dizisi sunuyor. Cihazları 352 × 176 piksel içeriyor; toplamda 60.000’den fazla algılama noktasına sahip ve hepsi kontrol elektroniğiyle birlikte tek bir silisyum fotoniği çipinde inşa edilmiş. Kısa lazer darbeleri kullanmak yerine sistem, lazerin renginin kontrollü bir “chirp” içinde süpürüldüğü frekans modüleli sürekli dalga (FMCW) ışığına dayanıyor. Işık nesnelere çarpıp çipe döndüğünde, bir referans ışınıyla koherent olarak birleştiriliyor. Frekanstaki küçük farklılıklar, her noktanın ne kadar uzakta olduğunu ve sensöre doğru mu yoksa sensörden mi hareket ettiğini ortaya koyuyor; böylece hız dördüncü ölçülen boyut olarak ekleniyor.
Küçük Işık Ağı Nasıl Çalışıyor
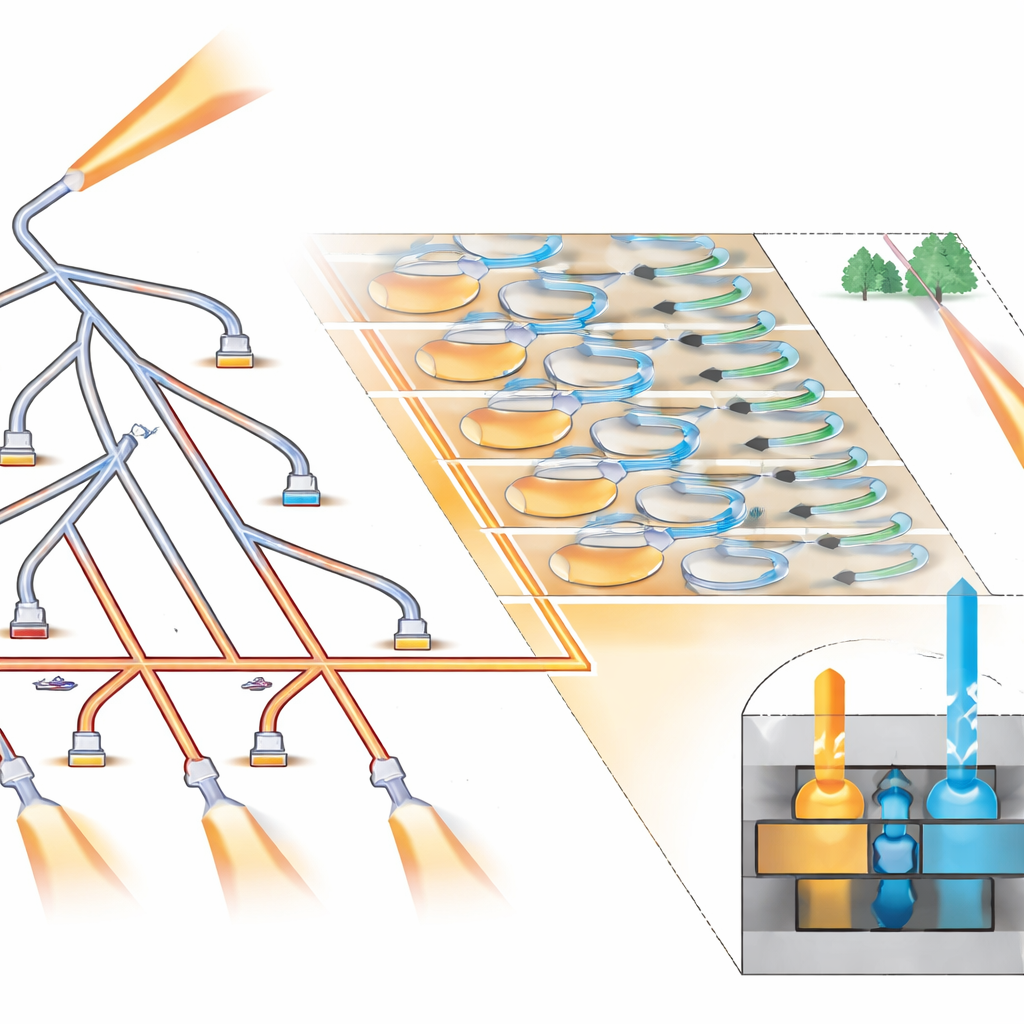
Birçok pikseli kapsarken enerji israfını önlemek için çip, chirp edilmiş lazer ışığını minyatür optik anahtarların bir ağacı üzerinden yönlendiriyor ve ışığı sekiz komşu piksel grubuna sırasıyla iletiyor. Her grup içinde ışık eşit olarak bölünüyor, böylece tüm sekiz piksel aynı anda verici ve alıcı olarak işlev görüyor. Her piksel, ışığı göndermek ve toplamak için bir çift ızgara (grating) kopleyicisi, mesafe ve hızı kodlayan beat (vuruntu) sinyalini çıkarmak için bir çift dengeli fotodedektör ve bir piksel içi yükseltici kullanıyor. Çip üzerine doğrudan yerleştirilmiş özel tasarlanmış mikrolensler, daha fazla ışığın içeri girip çıkmasını sağlayarak verimliliği artırıyor. Aynı açıklığın ışık gönderip alması ("monostatik" tasarım) sayesinde sistem pikseller arası istenmeyen çiftleşmeyi önlüyor ve sıradan bir kameraya çok benzer biçimde yalnızca tek bir dış görüntüleme lensine ihtiyaç duyuyor.
4B Kamerayı Test Etmek
Tak-çıkar kısa dalga kızılötesi lensler kullanarak ekip, çip etrafında kamera benzeri bir modül inşa etti ve iç ve dış mekan sahnelerinin detaylı 3B nokta bulutlarını yakaladı. Tek bir lensle sensör yaklaşık 33 × 19 derece görüş alanı ve 0,06 dereceye kadar açısal çözünürlük elde etti — ofisteki mobilyaları ve onlarca metre uzaktaki binaların mimari özelliklerini ayırt etmeye yeterli. Sistem, nokta başına sadece birkaç on nanojoule optik enerji ve piksel başına ortalama hedef gücü yaklaşık 178 mikrowatt kullanarak 4 ila 65 metre arasındaki nesneleri ölçtü ve sıkı göz güvenliği sınırları içinde kaldı. Ayrıca hareketi takip etti: bir deneyde dönen bir diskin değişen radyal hızını milimetre/saniye hassasiyetinde ölçtü.
Performans, Sınırlamalar ve Gelecek Gelişimi
Özenli ölçümler, sensörün performansının ışığın kuantum doğasının belirlediği temel fiziksel sınırlara yakın olduğunu gösteriyor, ancak henüz tamamen ulaşmış değil. Bugün ana sınırlama, her pikseldeki yükselticilerden kaynaklanan elektronik gürültü; bu, ideal, yalnızca foton sınırlı bir dedektöre kıyasla işaret-gürültü oranını biraz azaltıyor. Yazarlar, dahili referans ışık seviyesini artırmak ve optik düzeni iyileştirmek (muhtemelen silisyum–silisyum nitrür karışımları kullanarak) gibi doğrudan tasarım ayarlamalarının, sistemi gerçekten atım-gürültüsü (shot-noise) sınırlı bir rejime itebileceğini ve kullanılabilir menzili 200 metrenin ötesine uzatabileceğini özetliyor. Piksel dizisinden bazı çip içi anahtarları çıkarmak da uzak alan kapsamasındaki küçük boşlukları ortadan kaldırarak daha temiz nokta bulutları üretebilir.
Günlük 4B Görüşe Doğru
Bu çalışma, gerçek dünya uygulamalarının çoğunun talep ettiği piksel sayıları ve menzillerle rekabet eden, kompakt ve tamamen entegre bir 4B görüntüleme sensörünü gösteriyor; bununla birlikte güç ve boyutu da kontrollü tutuyor. Işık vericileri, alıcıları, ışın yönlendirmeyi ve kontrol elektroniğini tek bir silisyum çip üzerinde bir araya getirerek cihaz, 3B ve hareket algılamada CMOS sensörün dijital fotoğrafçılıkta oynadığı role benzer bir rol oynuyor. Daha ileri iyileştirmelerle, bu tür sensörler arabalara, robotlara, telefonlara ve başlıklara gömülecek kadar ucuz ve dayanıklı hale gelebilir; makinelere 3B dünyayı ve onun an be an nasıl değiştiğini kesin ve gerçek zamanlı bir şekilde anlama olanağı sağlayabilir.
Atıf: Settembrini, F.F., Gungor, A.C., Forrer, A. et al. A large-scale coherent 4D imaging sensor. Nature 651, 364–370 (2026). https://doi.org/10.1038/s41586-026-10183-6
Anahtar kelimeler: LiDAR, 4B görüntüleme, silisyum fotoniği, özerk sistemler, derinlik algılama