Clear Sky Science · tr
Akıllı robotlar ve etkileşimli sistemler için çok modlu elektronik derinin ölçeklenebilir yerinde üretimi
Robotlara ve Oyuncaklara Dokunma Duyusu Kazandırmak
Sıcak bir tost dilimini ezmeden veya elinizi yakmadan nazikçe alabilen bir robotu ya da sarıldığınızda, kulağını büktüğünüzde veya avucunuzla ısıttığınızda farklı tepki veren bir oyuncağı hayal edin. Bu araştırma, makinelere daha zengin, insan benzeri bir dokunma ve yakın çevre duyusu kazandırarak bu fikirleri gerçeğe daha yakın hale getiren yeni bir “elektronik deri” türünü tanımlıyor.
Makinelerin Neden Daha İyi Dokunuşa İhtiyacı Var
Bugünün robotları ve cihazları gerçek dünyayı işlerken hâlâ sakar davranıyor. Birçoğu yalnızca basınç gibi tek bir şeyi algılayabiliyor ve genellikle ölçeklendirilmesi zor, elle monte edilen hantal parçalara dayanıyor. Oysa gerçek insan derisi aynı anda birçok sinyali harmanlar: hafif temas, sert baskı, gerilme, sıcaklık ve temas öncesi nesnelerin ne kadar yakın olduğunu hissetme. Bu çalışmanın yazarları, bu duyumlardan birkaçını aynı anda yakalayabilen, ince, esnek ve farklı görevler için kolayca özelleştirilebilen bir elektronik deri oluşturmaya karar verdiler.
İnce, Esnek Bir Dokunma Duyusu İnşa Etmek
Ekip, temiz oda gerektirmeyen, ölçeklenebilir ve hızlıca uyarlanabilen düşük profilli bir “e-deri” geliştirdi. Bunun merkezinde ultraviyole lazerle desenlenen esnek bir bakır devre yer alıyor; bu, baskılı devre kartındaki kablolamaya benziyor ama bükülebiliyor ve eğrilerin etrafına sarılabiliyor. Bu devrenin üstüne ve altına sünger benzeri küçük hava gözenekleriyle dolu yumuşak bir silikon katman eklediler. Dış yüzeyler, cihazı elektriksel gürültüden koruyan ve algılama için ortak bir referans katmanı görevi gören ince bir karbon nanotüp filmle kaplanmış. Bu yığın, her sensör pedinin malzeme üzerine basıldığında, büküldüğünde, ısındığında veya bir nesne yaklaştırıldığında değeri değişen küçük bir elektriksel kapasitor gibi davranmasına izin veriyor. Aynı esnek devre üzerine monte edilmiş ek küçük çipler temassız olarak sıcaklık ve mesafeyi ölçüyor; böylece tüm yüzey sadece derinin basınç ve gerilme reseptörlerini değil, aynı zamanda sıcaklık ve yakın görme duygusunu da taklit ediyor. 
Sensörler Basıncı ve Hareketi Nasıl Hissediyor
E-derinin basınç ve bükülme bölümleri küçük değişikliklere güçlü tepki verecek şekilde tasarlanmış, aynı zamanda dayanıklı kalıyor. Bir şey bastırdığında, yumuşak katmandaki gözenekler sıkışarak iç metal katmanları birbirine yaklaştırır ve havayı daha fazla silikon ile yer değiştirir. Her iki etki de elektriksel sinyali yükseltir, özellikle malzemenin sıkılması en kolay olduğu düşük basınçlarda. Testler, e-derinin birkaç düzine paskale kadar çok hafif dokunuşları tespit edebildiğini, hızlı tepki verdiğini ve on bin basma-bırakma döngüsünden sonra bile çok az sapma gösterdiğini ortaya koydu. Levha büküldüğünde, iç kablolar etrafına katlanır, yine bir tarafta katmanlar arasındaki boşluğu küçültür ve sinyali artırır. Tepki, daha büyük bükülme açılarında daha belirgin hale gelir; bu, gerçek dünyadaki bükülmelerin genellikle tek bir alanda yoğunlaştığını yansıtıyor. Genel olarak tasarım, birçok önceki cihazda kullanılan karmaşık yığılmış yapılara gerek kalmadan yumuşaklık, kararlılık ve hassasiyet arasında bir denge sağlıyor. 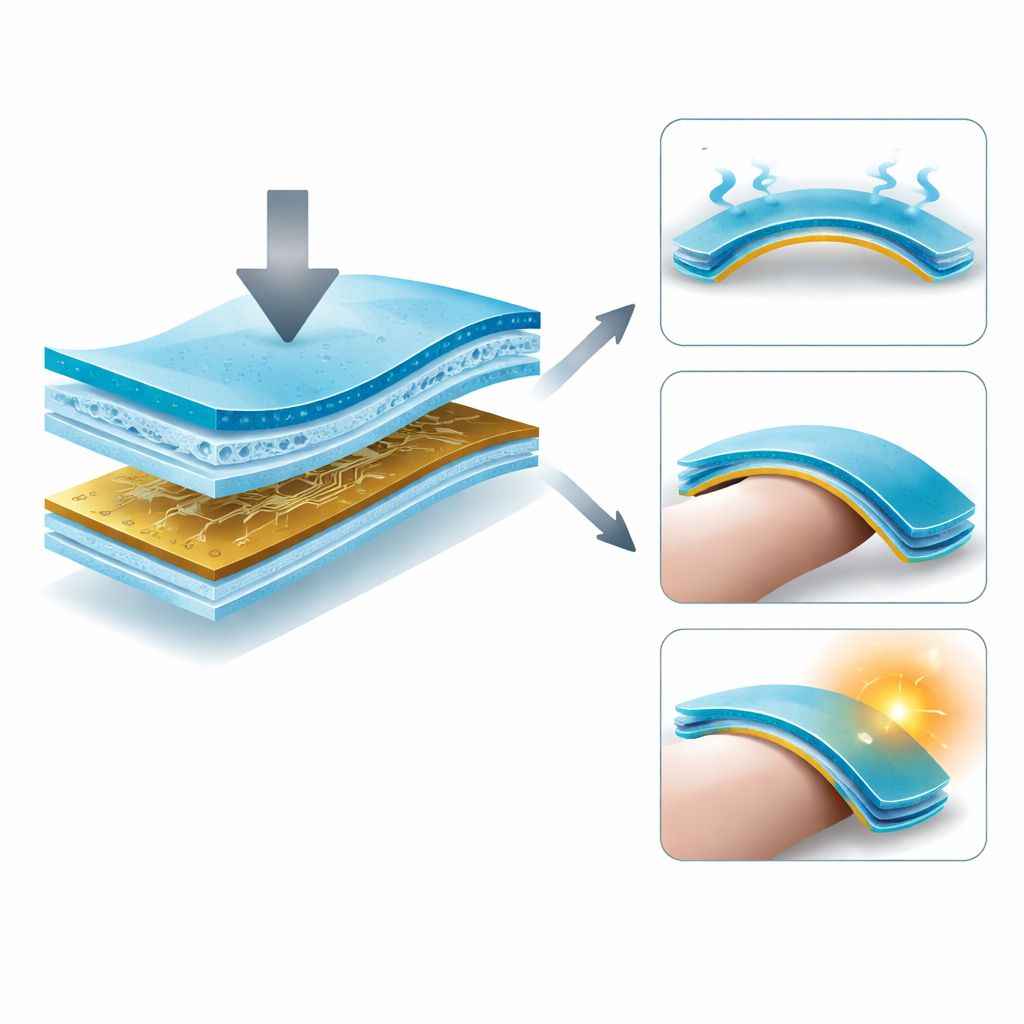
Mutfak Robotlarından Oyuncu Arkadaşlara
Bu e-derinin neler yapabildiğini göstermek için araştırmacılar onu bir robotik kavrayıcının etrafına sardı ve robota bir tür mutfak görevini verdiler. Kavrayıcı sıcak bir ekmek parçasına doğru hareket ederken, derinin içine gömülü küçük bir derinlik algılama modülü önce nesnenin ne kadar uzakta olduğunu haritalayarak robotun parmaklarını temastan önce hizalamasına yardımcı oluyor. Temas sağlandığında, basınç ve bükülme sensörleri nasıl sıkacağını yönlendiriyor, böylece kaymaları veya ekmeğin ezilmesi önleniyor. Aynı tabakada yer alan bir sıcaklık sensörü, ekmeğin bir kişiye güvenle verilebilmesi için yeterince soğuduğunu kontrol ediyor. Başka bir örnekte ekip, e-deriyle kaplanmış yumuşak bir fil oyuncağı yaptı. Göğsüne basmak, gizli bir titreşim motorunun ritmini kalp atışı gibi değiştirebiliyor, bir kulağı bükmek ses tetikliyor ve bir elin sıcaklığı oyuncağın yanaklarını ışıklandırarak dokunuşu oyunbaz, duygusal bir etkileşime dönüştürüyor.
Yüzey Boyunca Basınç Desenlerini Görmek
Bireysel noktalardan öte, aynı üretim yöntemi, bir yüzeye nereden ve ne kadar güçlü bir şekilde basıldığını okuyan büyük basınç algılama dizileri oluşturabiliyor. Ekip, bir basınç kamerası gibi çalışan 8’e 15’lik bir ızgara gösterdi: parmaklar, ağırlıklar veya damgalı şekiller bastığında sistem kuvvet desenini yeniden oluşturuyor ve hatta harfler gibi konturları tanımlıyor. Basınç haritalarını ve kütle merkezlerini yakalama yeteneği, robotların yükleri dengelemelerine, nesneleri tanımalarına veya akıllı tartı platformları ve etkileşimli yüzeyler olarak iş görmelerine yardımcı olabilir. Alttaki süreç hızlı ve modüler olduğu için tasarımcılar farklı kullanımlar için algılama piksellerinin boyutunu, aralığını ve yumuşaklığını ayarlayabiliyor; bu, akıllı mobilyalardan duruş izleme paspaslarına kadar uzanıyor.
Günlük Teknoloji İçin Anlamı
Basınç, bükülme, sıcaklık ve yakınlık gibi birden çok algılama modunu tek, ince ve kolay özelleştirilebilen bir tabakada birleştirerek bu çalışma, elektronik deriyi insan derisinin ince yeteneklerine çok daha yakın hale getiriyor. Çok yüksek basınçlarda performansı iyileştirmek ve bazı montaj adımlarını otomatikleştirmek için hâlâ gelişme alanı olsa da yaklaşım, zorlu, elle yapılmış donanıma gerek kalmadan robotlara, oyuncaklara ve diğer cihazlara zengin dokunuşun eklenebileceğini zaten gösteriyor. Pratik açıdan bu, kırılgan eşyaları daha güvenli tutan ev robotlarına, vücut temasını daha rahat izleyen tıbbi giyilebilirlere ve dokunuşumuza çok daha doğal şekilde tepki veren etkileşimli ürünlere yol açabilir.
Atıf: Lim, H., Choi, J., Han, C. et al. Scalable in-situ fabrication of multimodal electronic skin for intelligent robotics and interactive systems. npj Flex Electron 10, 34 (2026). https://doi.org/10.1038/s41528-026-00538-4
Anahtar kelimeler: elektronik deri, dokunsal algılama, esnek sensörler, robotik kavrayıcı, etkileşimli cihazlar