Clear Sky Science · tr
İntranevralkayıtlardan fantom uzuv hareketlerini çözümleme
Eksik Bir Bacakla Yeni Hareket Yolları
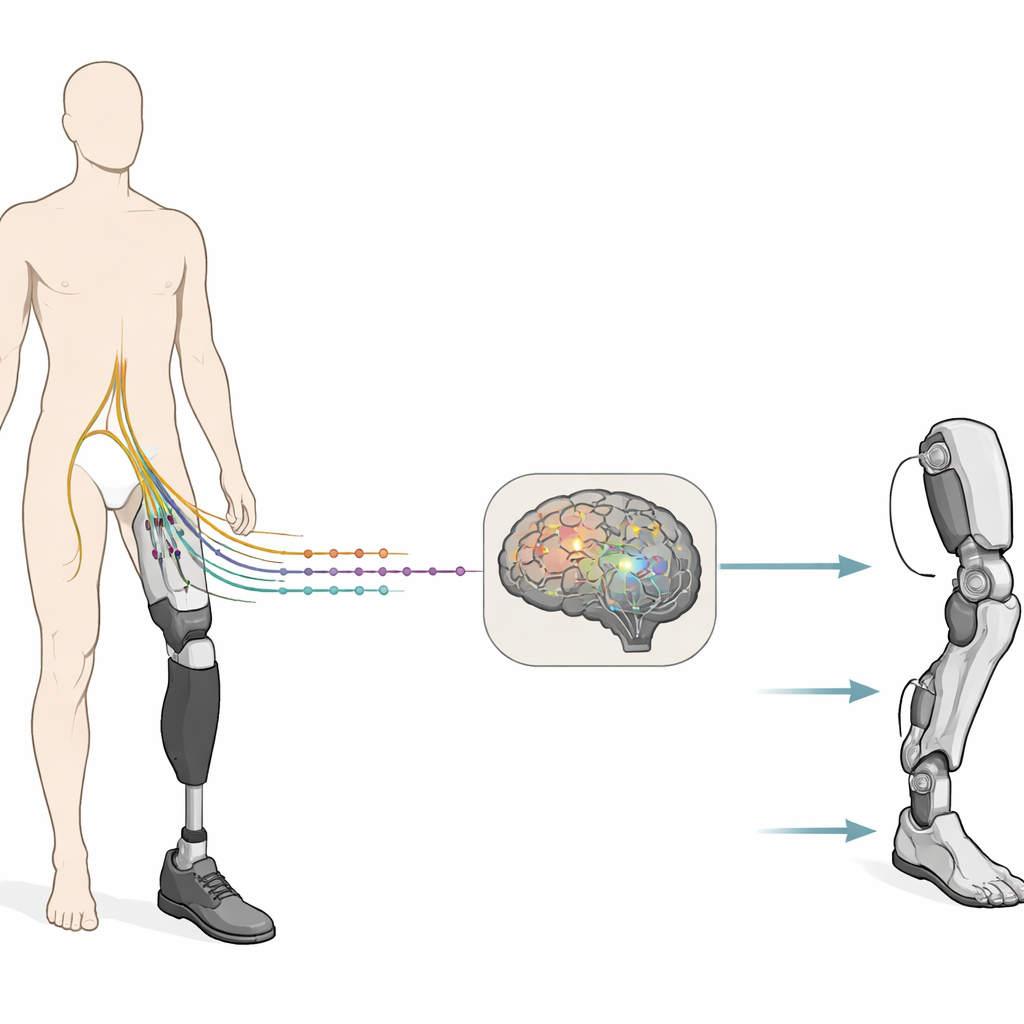
Dizin üstünden bir bacağını kaybetmiş kişiler için protezle yürümek, kendi bedenlerinin bir parçasını hareket ettirmekten çok sert bir makineyi yönlendirmeye benzetilebilir. Bu çalışma farklı bir yol keşfediyor: ampüte olmuş kişilerin “fantom” bacağını hareket ettirmeye çalışırken kalan bacak sinirlerini doğrudan dinlemek ve bu sinyalleri gelecekteki biyonik bir bacağı kontrol etmek için kullanmak. Beynin bir zamanlar diz, ayak bileği ve parmakları harekete geçirmek için kullandığı aynı kabloları kullanarak, araştırmacılar yapay bir bacağı doğal ve sezgisel şekilde kontrol etmenin mümkün olabileceğini gösteriyor.
Uyluğun İçindeki Sinirleri Dinlemek
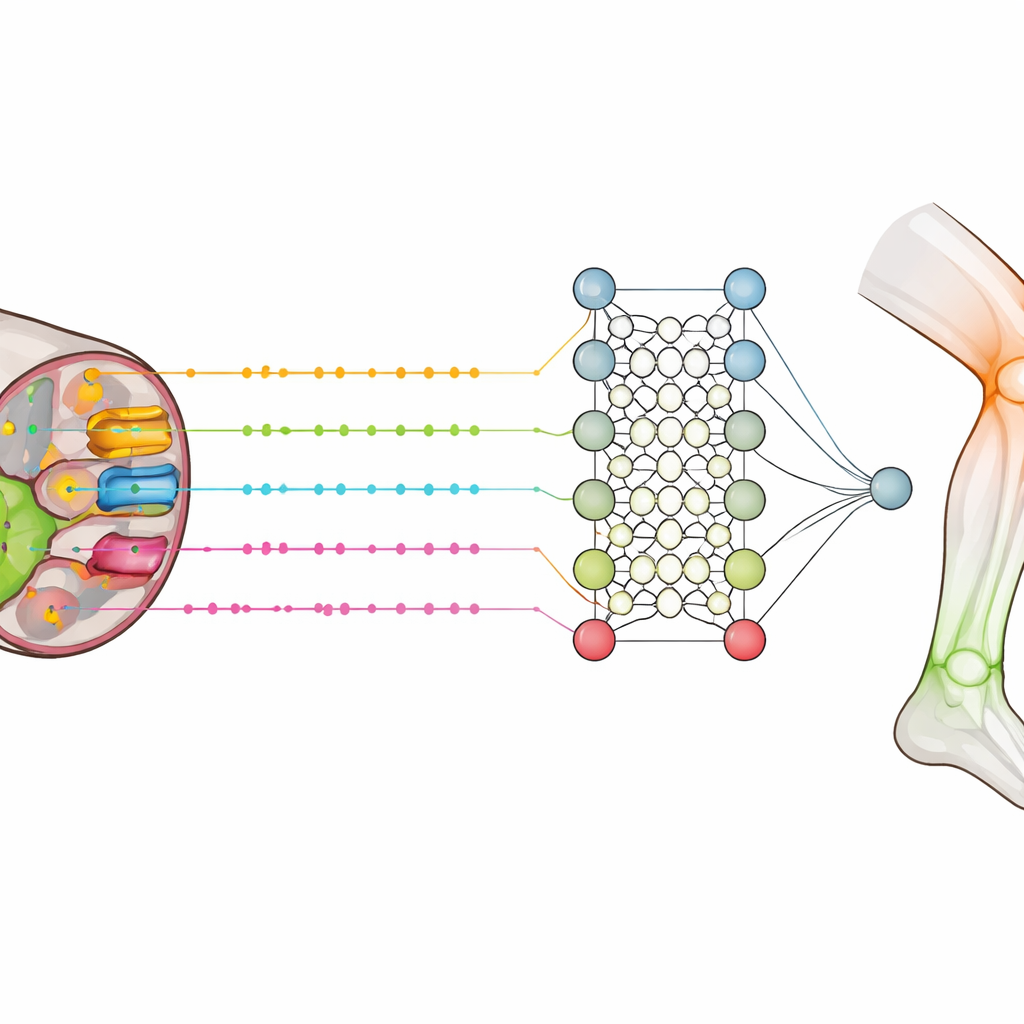
Araştırma ekibi, dizin üstünden bir bacağını kaybetmiş ancak hâlâ fantom uzuvlarını canlı bir şekilde hissedip “hareket ettirebilen” iki gönüllü ile çalıştı. Cerrahlar, uyluğun arkasındaki siyatik sinirin bir dalının içine saç teli inceliğinde dört elektrot şerit yerleştirdi. Her şerit çok sayıda küçük kayıt noktası taşıyordu ve toplamda 56 kanal sağlandı. Katılımcılar otururken komutla fantom dizlerini, ayak bileklerini veya parmaklarını bükmeye ve germeye çalıştıklarında, elektrotlar amputasyon sonrası artık olmayan kasları kontrol eden sinir liflerinden gelen elektriksel aktivite patlamalarını kaydetti.
Hayalet Hareketler Gerçek Elektrik İzleri Bırakıyor
Bacağın alt kısmı olmasa da, onu hareket ettirmeye yönelik çabalar sinirde açık ve yapılandırılmış sinyaller üretti. Çoğu kayıt noktası en az bir hareket türüne yanıt verdi ve birçoğu fleksiyon ile ekstansiyon arasında ayrım yapıyordu. Bazı elektrotlar diz hareketlerine daha duyarlı iken, diğerleri ayak bileği veya parmaklara daha çok yanıt veriyordu; bu, farklı kas gruplarının sinire nasıl bağlandığını yansıtıyordu. Sinir ateşleme desenlerinin gücü ve zamanlaması eklemden ekleme farklılık gösteriyordu; bu da vücudun orijinal bacak kontrol “haritasının” kalan sinir parçasında korunduğunu düşündürüyor. Araştırmacılar ayrıca bu motor desenlerin bilinen anatomiyle iyi uyum sağladığını gördü: belirli bir hareket için aktifleşen sinir kanalları genellikle o hareketi normalde üretecek kaslarla eşleşiyordu.
Beyin İlhamlı Bir Kodlayıcıyı Eğitmek
Sinir aktivitesini yakalamak hikâyenin sadece yarısı; gelecekteki bir protez bu karmaşık sinyalleri hızla komutlara dönüştürmek zorunda. Bilim insanları, gerçek nöronlar gibi kısa elektrik impulslarıyla iletişim kuran bir yapay ağ türü olan spiking sinir ağına yöneldi. Ham sinir kayıtlarını önce, sinyalin gücünün zaman içindeki değişimini vurgulayan yoğun spike dizilerine dönüştürdüler. Bu spike dizileri daha sonra ayak bileği fleksiyonu veya diz ekstansiyonu gibi hareket “sınıflarına” ayırmayı öğrenen kompakt bir kodlayıcıya verildi. Standart makine öğrenimi araçlarıyla karşılaştırıldığında, spiking kodlayıcı hem daha doğru hem de daha verimliydi ve sinir aktivitesinin kısa parçalarından birden çok niyet edilen hareketi güvenilir şekilde tanıyordu.
Sinir ve Kas Sinyallerini Birleştirmek
Elektrotlar uyluk kaslarının arasına yerleştirildiğinden, daha düşük frekans aralığında küçük kas sinyalleri de yakaladılar. Kayıtları filtreleyerek, ekip kas benzeri aktiviteyi daha hızlı sinir spike’larından ayırabildi. Kodlayıcılarını yalnızca kas sinyalleriyle eğittiklerinde, yalnızca yüksek frekanslı sinir verisi kullanmaya kıyasla performans düzeldi. En iyisi ise, her iki kaynağın — sinir ve kalan kas — birleştirilmesiydi; bu özellikle diz ve ayak bileği hareketleri için doğruluğu daha da artırdı. Bu, tek bir implantlı teknolojinin hem sinir trafiğine hem de kalan kas aktivitesine erişerek robotik bir bacak için daha zengin ve daha kararlı bir kontrol sinyali sağlayabileceğini öneriyor.
Bacağı Hareket Ettirirken Yeri Hissetmek
Giden hareket komutlarını dinleyen aynı intranevralelektrotlar ters yönde de kullanılabilir: sinire küçük elektrik darbeleri gönderip duyumlar uyandırmak. Bu gönüllülerle önceki çalışmalarda, bu implantlar yoluyla verilen stimülasyon ayak tabanı ve parmaklarda dokunma benzeri hisler üretti. Mevcut çalışmada, araştırmacılar motorla ilgili kayıtların ve dokunma ile ilgili duyumların nerede örtüştüğünü haritaladılar. Motor ve duyumla ilgili sinir liflerinin büyük ölçüde uyluk seviyesinde ayrıldığını buldular; bu, tasarımcıların bazı kontakları ağırlıklı olarak motor kod çözmeye, diğerlerini ise ağırlıklı olarak sensörik geri bildirime ayırmasını kolaylaştırabilir ve ikisi arasındaki girişimi azaltabilir.
Bu Geleceğin Biyonik Bacakları İçin Ne Anlama Geliyor
Bir uzman olmayan okuyucu için ana mesaj, eksik bir bacağı hareket ettirmek için kullanılan “kabloların” amputasyondan yıllar sonra bile hâlâ aktif ve okunabilir olduğudur. İnce elektrotları kalan sinirin içine yerleştirerek ve sinyalleri yorumlamak için beyin ilhamlı algoritmalar kullanarak, bir amputenin anlık olarak dizini bükmeye, ayak bileğini yönlendirmeye veya fantom uzuvta parmakları kıvırmaya çalışıp çalışmadığını tespit etmek mümkündür. Eksik ayaktan gelen dokunma hissini geri getiren elektriksel stimülasyonla eşleştirildiğinde, bu yaklaşım protez bacakların doğal bir uzuv gibi hissetmesini ve hareket etmesini sağlayabilir. Çalışma hâlâ erken, laboratuvar aşamasında ve sadece iki kişide çevrimdışı olarak test edildi; ancak sinir sistemine doğrudan bağlanan gelecekteki protezler için daha sezgisel kontrol, daha iyi denge ve daha güçlü bir bedenleşme hissi sunma yönünde önemli bir temel oluşturuyor.
Atıf: Rossi, C., Bumbasirevic, M., Čvančara, P. et al. Decoding phantom limb movements from intraneural recordings. Nat Commun 17, 2511 (2026). https://doi.org/10.1038/s41467-026-69297-0
Anahtar kelimeler: fantom uzuv, nöroprotezler, periferik sinir arayüzü, spiking sinir ağları, alt ekstremite amputasyonu