Clear Sky Science · tr
Havada kavrama ve etkileşim için el benzeri otonom uçan robot
Adeta el sıkışabileceğiniz uçan yardımcılar
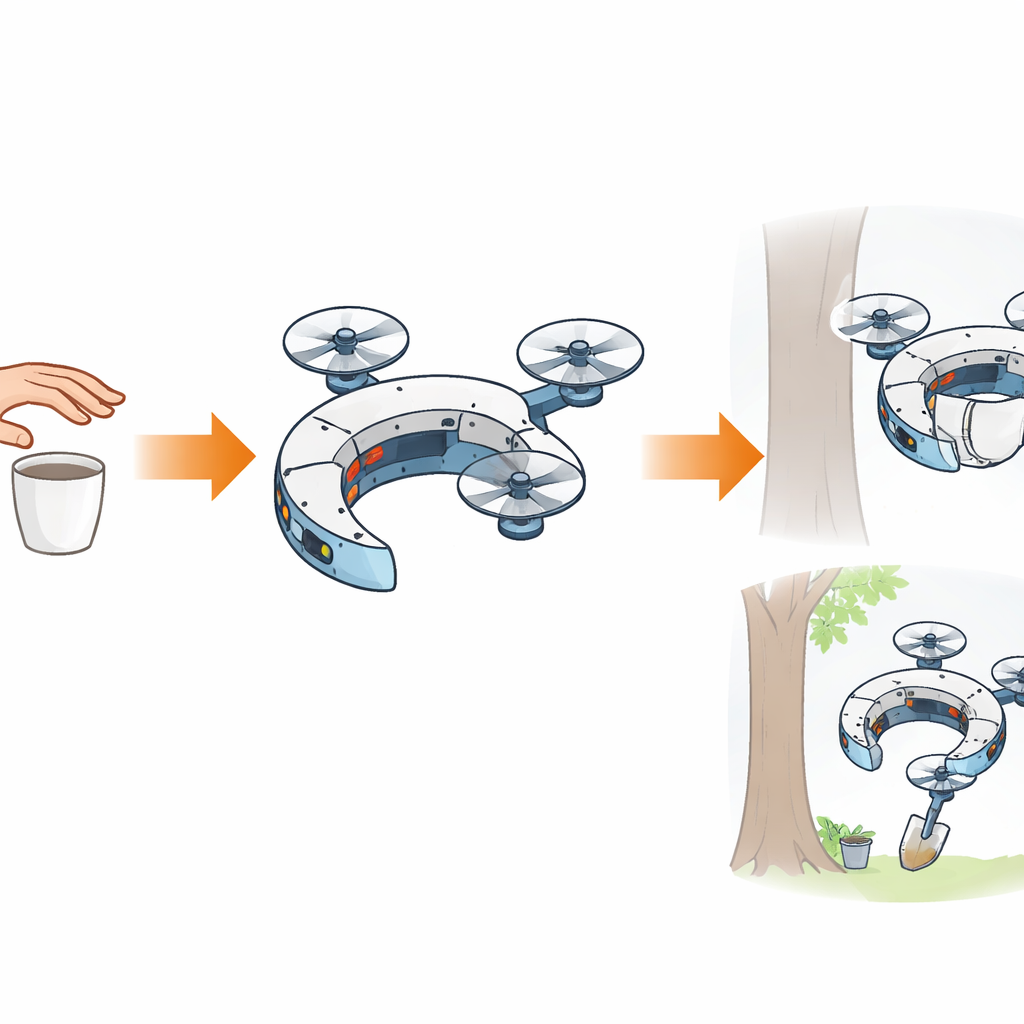
Çevrenizi sadece filme çekmekle kalmayıp bir kapıyı açabilen, size içecek uzatabilen veya ulaşılması zor bir raftan paket alabilen küçük bir uçan robot hayal edin. Bu çalışma tam da böyle bir cihazı tanıtıyor: gövdesi el görevi gören kompakt bir drone. Kuş uçuşu ve insan kavrama fikirlerini harmanlayarak, araştırmacılar havadaki robotların pasif olarak izlemekten öteye geçerek evlerde, fabrikalarda ve arama-kurtarma ortamlarında aktif yardımcılar hâline gelebileceğini gösteriyor.
Uçan kameralardan uçan ellere
Günümüzde çoğu drone fotoğrafçılık, haritalama veya denetim için kullanılan “uçan gözdür.” Mühendisler dronelara bir şeyleri kavrayıp itebilmeleri için robot kolları eklemeye çalıştıklarında makineler çabucak hantal, ağır, enerjiyi çok tüketen ve özellikle kapalı alanlarda ya da insanlara yakınken kontrolü zor sistemler hâline geliyor. Yazarlar bu sorunu drone’un gövdesini yeniden tasarlayarak ele alıyor. Ayrı bir kolu cıvatalamak yerine, çerçeveyi nesnelerin etrafını sarabilen, direklere veya ağaçlara konabilen ve yine de dar alanlarda çevikçe uçabilen bir el gibi davranacak şekilde tasarlıyorlar.
El biçimli uçan bir gövde
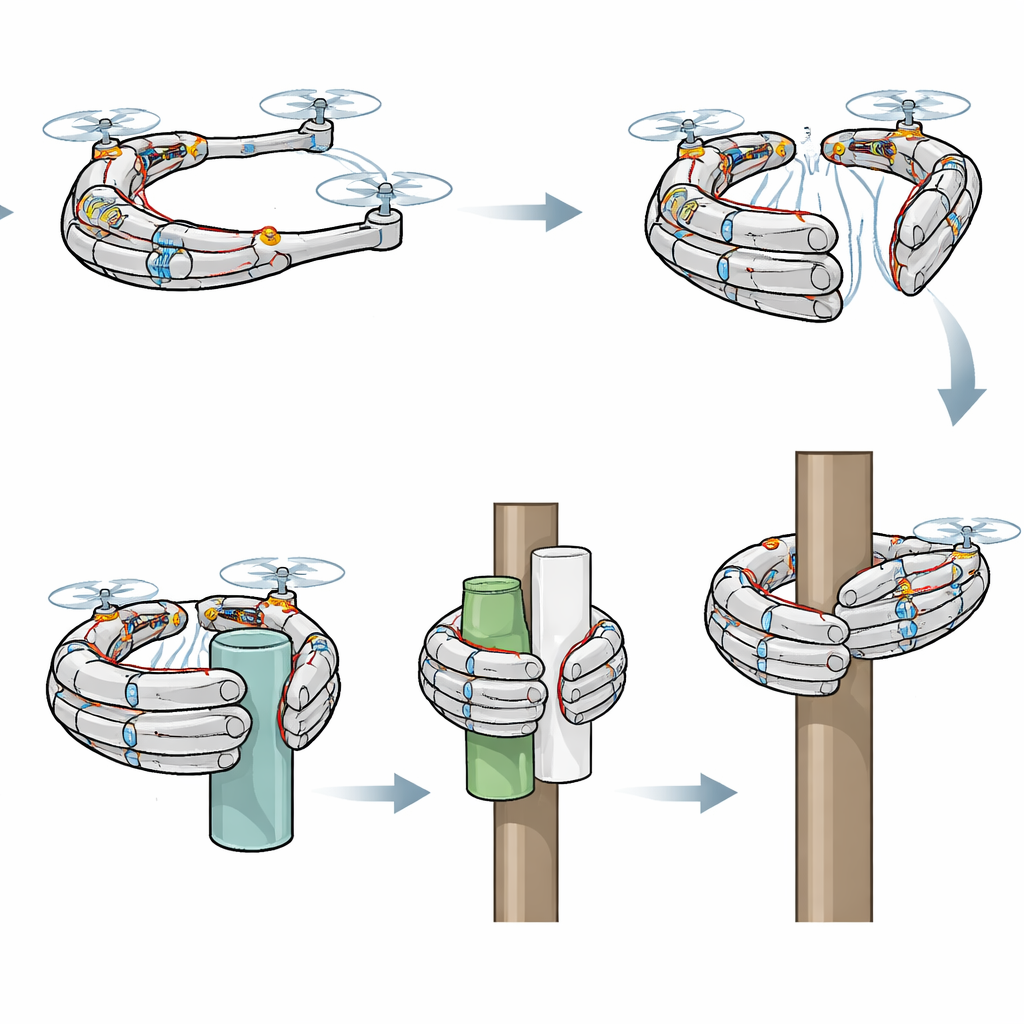
HI‑ARM adındaki yeni robot, yetişkin bir elin boyutu ve ağırlığı civarında. Çerçevesi parmakları olan kıvrık bir avuca benzeyen açık bir C-şeklini oluşturuyor. Bu halkanın içinde teleskopik segmentler ve bükülen eklemler yer alıyor; bunlar çok sayıda motorla değil, tek bir servo tarafından çekilen tendon benzeri bir kablo ile çalıştırılıyor. Yaylar yapının bükülmesine izin veriyor ve sonra orijinal şekline geri sıçramasını sağlayarak kaslar ve tendonlar gibi enerji depolayıp serbest bırakıyor. Bu az sayıda aktüatör kullanılan (underactuated) tasarım robotun bilinmeyen nesnelere uyum sağlamasını mümkün kılıyor: kablo gerildikçe farklı parçalar sıkışıp döndürülüyor ve kavranan şeye doğal olarak uygun hale geliyor.
Robotun düşünmesi ve uçması
Bu dönüşen gövdayı işe yarar kılmak için ekip robotun üzerine katmanlı bir “beyin” kuruyor. Bir bölüm drone’un nereye uçması gerektiğini ve ne zaman kavraması, bırakması veya tünemesi gerektiğini planlıyor; bunun için “yakala,” “bırak” veya “direğe tüneme” gibi temel eylemlerden oluşan bir kütüphaneden yararlanıyor. Başka bir bölüm bu planları drone’un gerçek zamanlı izleyebileceği düzgün uzay yollarına çeviriyor. Hızlı bir kontrol sistemi ise robotun konumunu, deforme olurken değişen ağırlık merkezinin yerini ve bir nesneyi kaldırırken ya da itişe maruz kalırken oluşan ek kuvvetleri sürekli olarak tahmin ediyor. Uyarlanabilir algoritmalar bu bozucu etkenleri algılıyor ve gövde bir şişeyi sıkar veya bir kapıyı iterken bile uçuşun sabit kalması için dört pervanenin itişini otomatik olarak artırıyor veya dengeleştiriyor.
Bu uçan elin yapabilecekleri
Kapalı alan testlerinde HI‑ARM tanıdık insan benzeri hareketleri gerçekleştiriyor. “Avucunu” tam bir su şişesini kavrayıp hassas bir uçuş yoluyla taşılamak için kullanıyor ve “uç parmaklarıyla” tek bir ince peçeteyi sıkıp kaldırıyor—bir makine için özellikle hassas bir görev. Aynı mekanizma oyuncaklara, kutulara, çantalara ve tuhaf biçimli bloklara önceden şekillerini bilmeye gerek kalmadan uyum sağlıyor. Robot bir ağaç gövdesine veya direğe kadar uçup etrafını kavrayabiliyor, pervanelerini kapatıp sadece orada asılı kalabiliyor; bu şekilde sabit havada asılmaya göre çok daha az enerji tüketiyor. Ayrıca bir kapıya yaklaşabiliyor, tutacağı etrafını sarıp kapıyı iterek açabiliyor ve itme geri kuvvetlerine rağmen dengede kalmayı sürdürebiliyor.
İnsanlara yardım etmek ve dış mekânda çalışmak
Araştırmacılar ayrıca böyle bir cihazın insanlarla nasıl etkileşebileceğini de inceliyor. Ev benzeri bir sahnede drone bir kişinin elinden paketi alıyor, bir yere koyuyor, bir masadan içecek alıp uzatıyor, daha sonra boş şişeyi topluyor ve nihayet bir portmantoya tüneyerek bir sonraki görevi bekliyor—hepsi tek bir sürekli, akıcı dizide. Video gözlüğü ve basit tek elle kullanılan bir kontrol cihazı ile sınırlı hareket kabiliyetine sahip bir kişi, robotu uzaktan yönlendirerek dışarıdan bir fincan kahve aldırıp onlarca metre mesafeden geri getirtebiliyor. Açık hava denemelerinde drone bambu ve direklere konuyor, gövdesini küçülterek dar bir kaya açıklığından sıkışarak geçiyor ve bir içeceği bir nehrin karşısına taşıyor; bu, teslimat, denetim ve kurtarma görevlerinde potansiyel rollerin işareti.
Günlük yaşam için ne anlama geliyor
Bu çalışma, küçük el biçimli bir uçan robotun çevik uçuş yeteneğini şaşırtıcı derecede insan‑benzeri kavrama, tüneme ve nesnelerle/insanlarla etkileşim yollarıyla birleştirebileceğini gösteriyor. Gövde tasarımı, hareket planlama ve uyarlanabilir kontrolü sıkı şekilde bütünleştirerek yazarlar önceki hava manipülatörlerinin önünü kapayan birçok boyut ve kararlılık sorununu aşıyor. Gelecek sürümlerin tamamen bağımsız çalışabilmesi için daha iyi yerleşik görme ve daha akıllı karar verme yeteneklerine ihtiyaç duyacağı doğru olsa da, bu çalışma “uçan ellerin” paket teslimi yapabileceği, engelli insanlara yardımcı olabileceği, altyapıyı bakım edebileceği ve insanların erişiminin zor veya tehlikeli olduğu yerlerde hassas görevleri gerçekleştirebileceği bir geleceğe işaret ediyor.
Atıf: Wu, Y., Yang, F., Jin, R. et al. Hand-like autonomous flying robot for airborne grasping and interaction. Nat Commun 17, 2200 (2026). https://doi.org/10.1038/s41467-026-68967-3
Anahtar kelimeler: hava ile manipülasyon, uçan robot eli, dronlar, insan-robot etkileşimi, biyomimetik robotik