Clear Sky Science · tr
Böcek ölçeğinde yapay görsel-kokusal biyonik bileşik göz
Tek Bir Küçük Pakette Robot Gözleri ve Burunları
Bir robot böceğin yalnızca nereye gittiğini görmekle kalmayıp havadaki tehlikeli gazları “koklayabildiğini” hayal edin—ve tüm bunların gerçek bir sineğin gözü boyutundan daha büyük olmayan bir aygıtla gerçekleştirilmesi. Bu makale tam da böyle bir çalışmayı anlatıyor: görme ve koku alma işlevlerini tek, ultra-hafif bir sensörde birleştiren minyatür bir yapay bileşik göz. Meyve sinekleri ve diğer böceklerden alınan çözümleri örnekleyerek, araştırmacılar geleceğin insansız hava araçları ve küçük robotlarının çok az enerji harcayarak, çevik ve güvenli biçimde karmaşık, tehlikeli ortamlarda gezinmesini nasıl sağlayabileceğini gösteriyorlar.

Doğa Mühendisleri Ne Öğretti
Meyve sinekleri gibi böcekler, geniş görüş alanında hareketi algılamak için yüzlerce küçük mercekle dolu kubbeler olan bileşik gözlere güvenir; bu sayede yırtıcılardan ve engellerden kaçınabilirler. Aynı zamanda antenleri, havadaki yiyecekleri, eşleri veya tehditleri tespit etmelerini sağlayan keskin bir koku yeteneği sunar. Bu iki bilgi akışı böcek beyninde birleşerek hızlı kararları yönlendirir. Yazarlar bu çift duyuyu donanımda yeniden yaratmayı hedefledi: geniş açılı hareket algılama yeteneğini taklit eden bir sinek gözü ve çevre havasını okuyan kimyasal bir “burun”u entegre eden, böcek ölçeğinde tek bir aygıt ve daha sonra her iki sinyali daha akıllı davranış için birleştiren bir sistem.
Gerçekten İşleyen Küçük Kavisli Bir Göz İnşa Etmek
Ekip, küçük bir böcek kafası büyüklüğünde silindirik bir yapay göz inşa etti ve 1,5 milimetre genişliğinde bir kare içine 1.027 küçük mercek sığdırdı. Son derece hassas bir 3B baskı tekniği kullanarak eğimli mikrolens dizisini esnek bir organik ışık dedektörü katmanının üzerine doğrudan yazdırdılar. Her mercek tek bir dedektörle hizalanarak, tıpkı bir böceğin ommatidiumu gibi kendi yönüne bakan bireysel bir “piksel” oluşturuyor. Mercekler, bir yönden gelen ışığın komşu piksellere sızmaması için dar bir kabul açısıyla tasarlandı; bu, gerçek bileşik gözlerdeki doğal optik izolasyonu yakından taklit ediyor. Sis ve nemle başa çıkmak için araştırmacılar, yüzeyde damlacık oluşumunu önlemeye yardımcı olan mercekler arasına mikroskobik saç benzeri yapıların eklendiği bir çözüm geliştirdiler; bu yapı, gerçek böcek gözlerindeki kendi kendini temizleyen kıllara benziyor.
Hareket Görme ve Havadaki Maddeleri Gerçek Zamanlı Algılama
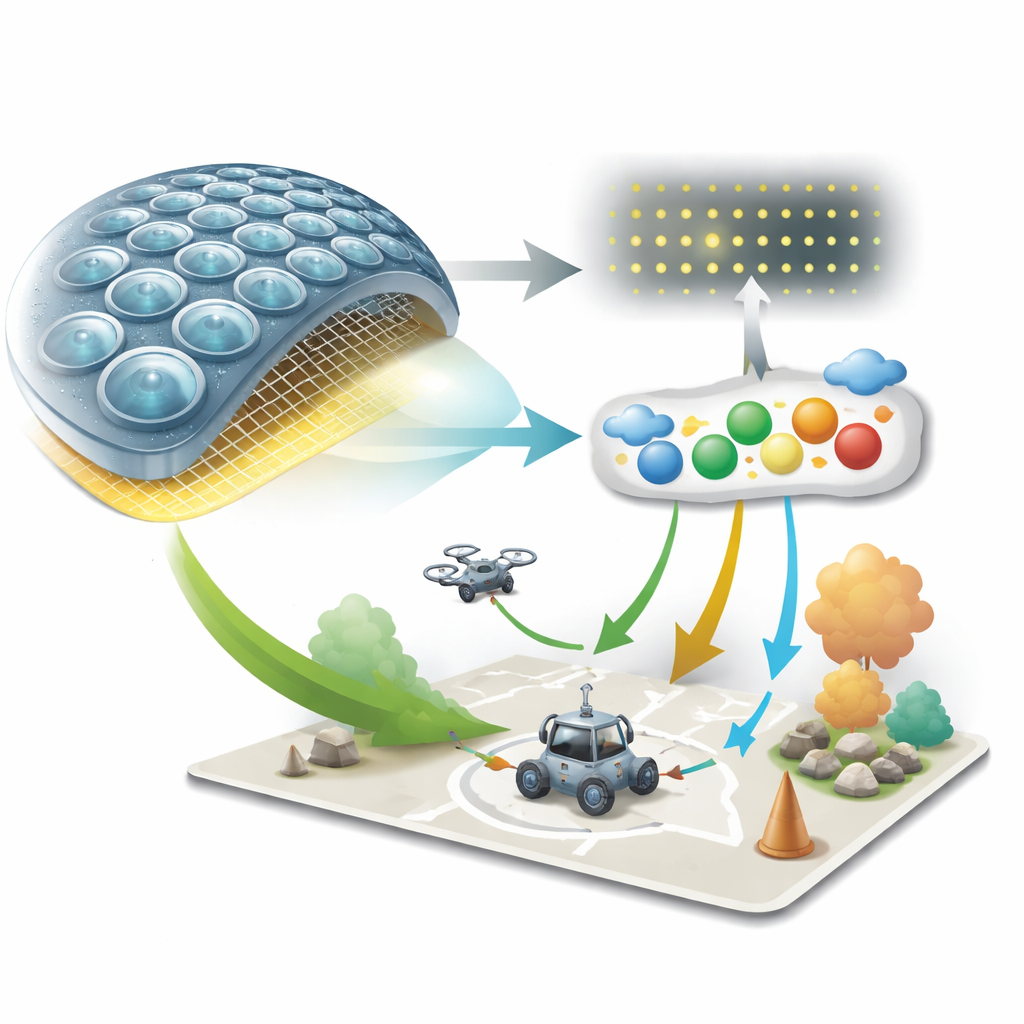
Merceklerin altında, organik yarı iletkenler ve kurşun sülfür kuantum noktalarının bir karışımından yapılan özel olarak tasarlanmış bir ışığa duyarlı katman yer alıyor. Bu birleşim aygıtın ultraviyole’den görünüre ve yakın kızılötesine kadar ışığı algılamasını sağlar ve yaklaşık on binde bir saniyelik bir yanıt süresiyle—yaklaşık 1.000 kare/saniye’lik bir flicker füzyon hızına yetecek kadar—çok hızlı tepki verir. Keskin, ayrıntılı görüntüler oluşturmak yerine, aygıt geniş görüş alanı boyunca değişen parlak noktaları kaydeder; basit bir matematiksel model bu değişimleri nesnelerin nerede olduğu, ne kadar uzakta olabilecekleri ve nasıl hareket ettikleri bilgisine dönüştürür. Paralel olarak, bir mürekkep püskürtmeli baskıyla oluşturulmuş renkimetri dizisi yapay bir burun gibi çalışır: metal kompleksler ve pH duyarlı boyalar içeren küçük noktalar belirli tehlikeli gazlara maruz kaldıklarında renk değiştirir. Hafif, sinek esinli bir hashleme algoritması bu renk değişimlerini gaz kimliğine ve yaklaşık konsantrasyona dönüştürür; on yaygın toksik buhar arasında yaklaşık %93 doğruluk sağlar.
Laboratuvar Tezgâhından Yuvarlanan Robotlara ve İHA’lara
Bu böcek ölçeğindeki “göz-ve-burun”un laboratuvar dışındaki yararlılığını kanıtlamak için araştırmacılar aygıtı iki küçük insansız platforma monte ettiler. Çok yönlü tekerlekli bir robotta kavisli göz, sistemin 180 derecelik yatay bir alanı izlemesine ve yaklaşan engelleri kaçınacak kadar hızlı hareket algılamasına izin verdi; bu, sisli koşullarda bile çalıştı. Yine böceklerin kaçış davranışlarından ilham alan basit, donanıma uygulanmış kurallar robota gelen nesnelerden geri çekilme veya yolda seyrederken etrafından dolaşma yeteneği verdi. Küçük bir insansız hava aracında aynı aygıt, üç boyutta hareketli ışık kaynaklarının konumunu izledi ve gaz sensörüyle birlikte, ışık kaynakları ve tehlikeli kimyasal bulutların bulunduğu bir test ortamında özerk keşfi yönlendirdi. Görsel ve koku bilgileri birleştirilerek dronun hem hedefleri takip etmesi hem de tehlikeli gazları alanda haritalaması sağlandı.
Geleceğin Küçük Makineleri İçin Neden Önemli
Bu çalışma, gerçek bir böcek gözü kadar küçük bir sensöre hem geniş açılı, yüksek hızlı görme hem de kimyasal algılama sığdırmanın mümkün olduğunu gösteriyor. Aygıt ayrıntılı görüntü niteliğinden fedakârlık ederek hareket hassasiyeti, geniş spektral kapsama ve enerji verimliliği gibi özellikleri önceliklendiriyor—bu, sınırlı güç ve hesaplama kaynaklarına sahip minyatür dronlar ve robotlar için kritik olan takaslar. Gözleri ve burunu tek, kompakt bir sistemde birleştirip böcek beyinlerinden alınan füzyon stratejilerini uygulayarak çalışma; engellerden kaçabilen, riskli gazları tanıyabilen ve uçan böceklerin çevikliğine benzer bir çeviklikle karmaşık ortamları keşfedebilen küçük, düşük maliyetli otonom makineler sürüsüne doğru bir yol gösteriyor.
Atıf: Wang, J., Wei, S., Qin, N. et al. An insect-scale artificial visual-olfactory bionic compound eye. Nat Commun 17, 2259 (2026). https://doi.org/10.1038/s41467-026-68940-0
Anahtar kelimeler: biyonik bileşik göz, biyotomuruklu robotik, multimodal algılama, mikro görme sistemleri, tehlikeli gaz tespiti