Clear Sky Science · tr
Itki kaynaklı hipograviteyle geliştirilmiş robotik sıçrayışlar: hassas, öngörülebilir ve genişletilmiş zıplamalar
Ay’dalarmış gibi Sıçrayabilen Robotlar
Bir duvarın üzerinden atlayabilen, dereyi aşabilen veya hareket eden bir pencereden girip iniş noktasını bir santimetreden daha az sapmayla kaçırmadan ulaşabilen bir kurtarma robotu hayal edin. Bu makale, tam olarak bunu yapan yeni bir sıçrama makinesini anlatıyor: kısa süreliğine kendine Ay ya da Plüton’daki gibi "düşük yerçekimi" sağlayarak zıplayan, aynı zamanda sıçrayışlarını hassas ve öngörülebilir tutan bir yaklaşım.
Bugünün Sıçrayan Robotlarının Neden Zorlandığı
Çalı çekirgeleri veya kurbağalar gibi hayvanlar uzaklara sıçrayabilir, dar perçinlere inebilir ve havadayken bir şey değiştiğinde pozisyonlarını düzeltebilir. Çoğu robot bunu yapamaz. Geleneksel sıçrayan robotlar bir ikilemle karşılaşır: ya güçlü yaylar veya motorlar kullanıp çok uzak sıçrayışlar yapabilirler ya da hassas ve güvenli iniş sağlayabilirler; nadiren her ikisini birden. Yay yüklü "sapan" tasarımlar çok enerji depolar ama yeniden şarjları yavaştır ve havadayken kontrol edilmeleri zordur. Doğrudan motorlu bacaklar kontrolü kolaylaştırır ama çok yüksek sıçrayışlar için gereken ani gücü veremez. Ek kanatlar veya rotorlar havada kalış süresini uzatabilir, ancak uçuş yolunu çoğu zaman düzensiz ve öngörülemez hale getirir; bu da küçük hedeflere isabet etmeniz veya hareketli engelleri savuşturmanız gerektiğinde sorun oluşturur.
Hava İtkisiyle Düşük Yerçekimini Taklit Etmek
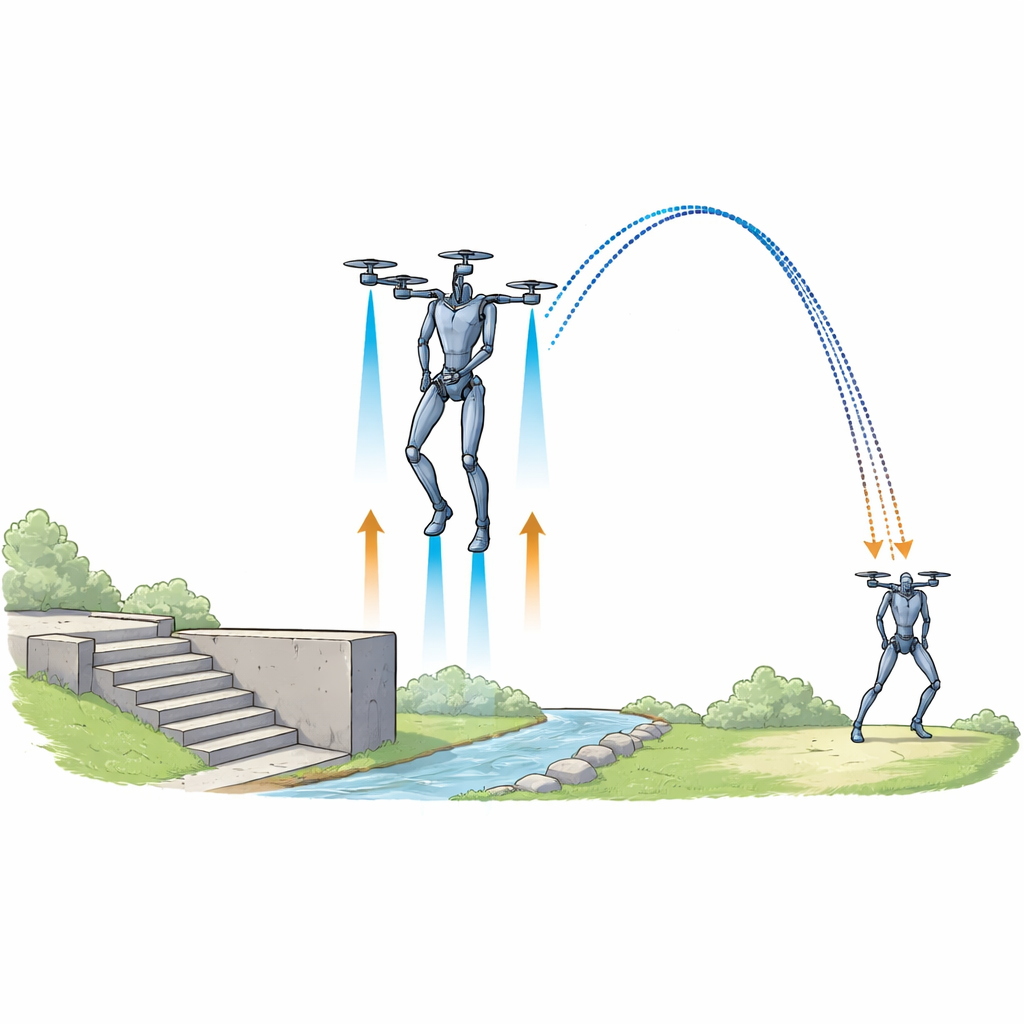
Araştırmacılar, bu ikilemi aşan 370 gramlık iki bacaklı bir robot olan GravOff’u geliştirdiler; robot kendi düşük yerçekimi ortamını yaratıyor. Robotun uzun, böcekimsi bacakları doğrudan motorlarla sürülüyor ve geniş bir gövde üzerine yerleştirilmiş dört küçük pervane bulunuyor. Bir sıçramada, bacaklar yere güçlü bir itiş vererek yüksek bir kalkış hızı sağlar. Aynı zamanda pervaneler, Dünya’nın yerçekiminin bir kısmını iptal edecek kadar yukarı doğru itki uygular; yazarların "itki kaynaklı hipogravite" adını verdikleri durum budur. Çünkü "etkili yerçekimi" daha düşük olduğunda, aynı bacak gücü robotu çok daha yüksek ve uzun bir yörüngeye gönderir—yüksekliğe kadar 6,9 metre, vücut yüksekliğinin yaklaşık 46 katı—bu, en iyi rekor kıran sıçrayıcılarla karşılaştırılabilir, fakat kalkış ve iniş hızları daha yumuşaktır.
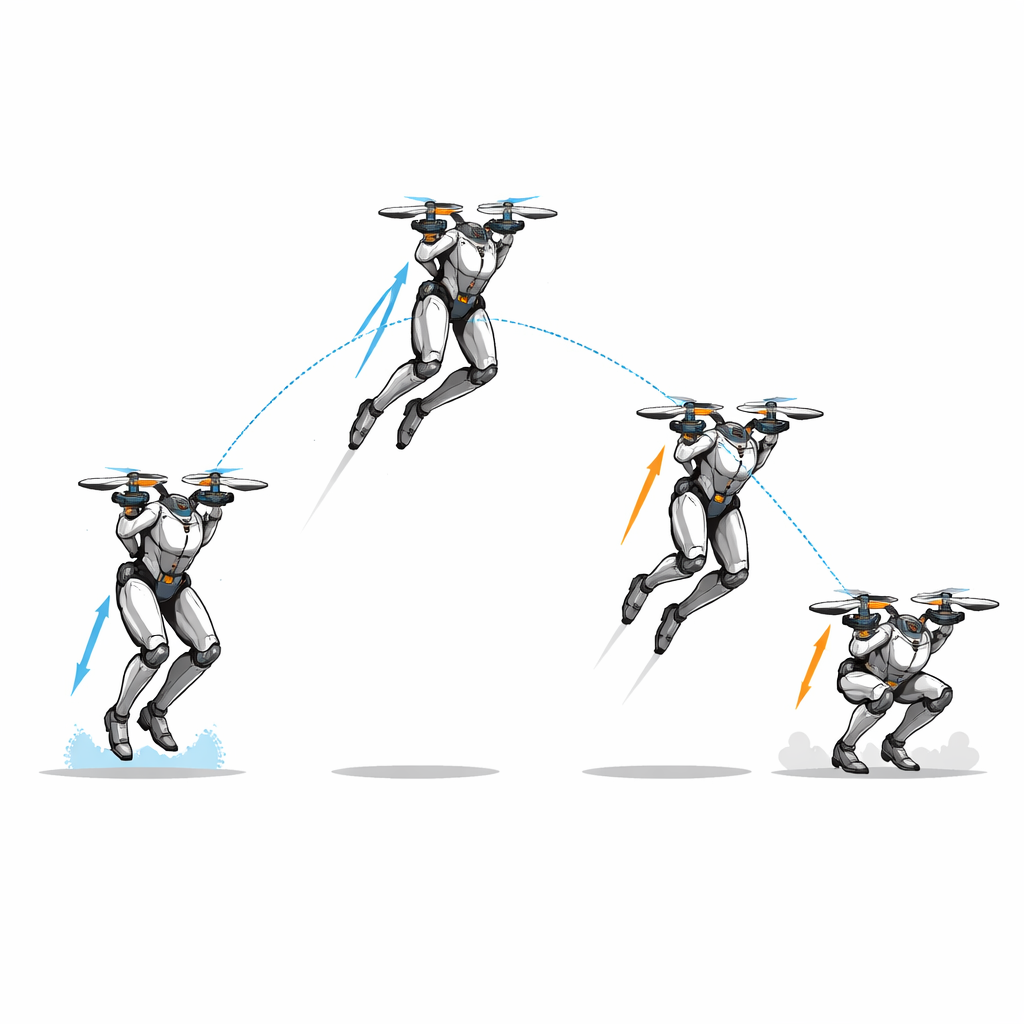
Mükemmel Eğriyi Çizmek ve Yönlendirmek
GravOff’u özellikle sıradışı kılan yalnızca ne kadar uzağa sıçradığı değil, aynı zamanda seçilmiş bir yolu ne kadar hassas izlediğidir. Ekip her sıçramayı zaman damgalı bir yay olarak ele alıyor; konum ve zaman çizilmiş bir parabolün noktaları gibi birbirine kilitleniyor. Sensörler ve öngörücü bir kontrol algoritması kullanarak robot, havadaki gerçek hareketini referans eğriyle saniyede onlarca kez karşılaştırır ve pervanelerini hafifçe eğerek kendini tekrar rotaya iteler. Kritik olarak, pervaneler robot gövdesinin eğilmesinden bağımsız olarak döndürülebiliyor, böylece robot tüm gövdesini yatırmak zorunda kalmadan itkisini hedefleyebiliyor; denge ve yönlendirme ayrılmış oluyor. Bu ikili kontrol, GravOff’un kalkış açısı 15 derece kadar sapsa ya da uçuş sırasında güçlü bir vantilatör 3,5 m/s hızında rüzgâr estirse bile, robotu kenarı yalnızca 25 santimetre olan bir kare içine milimetre düzeyinde tekrarlanabilirlikle indirmesini sağlıyor.
Sıçrama Sonrası Zıplama Olmadan Yumuşak, Kararlı İnişler
Yüksek sıçrayışlar genellikle sert inişler anlamına gelir; bu da donanıma zarar verebilir veya robotun takla atmasına neden olabilir. GravOff bunu iki iniş moduyla ele alıyor. Özellikle sert darbeler için her bacakta 3D yazıcıyla üretilmiş yumuşak bir sönümleyici enerji emilimini yardımcı oluyor. Küçük veya hareketli hedeflere hassas inişler için ise robot bacaklarını aktif olarak çekiyor ve sonra tam doğru anda tekrar uzatarak yere temas süresini uzatıyor. Bu "aktif sönümleme" pasif inişe göre çarpma kuvvetlerini dört kat azaltıyor ve gelen momentumun neredeyse tamamını iptal ederek robotun ilk temasında sekmeyip olduğu yerde durmasını sağlıyor.
Laboratuvar Sıçramalarından Gerçek Dünya Görevlerine
Kontrollü kapalı ortam testlerinin ötesinde, yazarlar GravOff’un sürünme ve tekerlekle ilerlemeyi sıçrama ile birleştirerek gerçek arazide çalışabildiğini gösteriyor. Güvenli bir kalkış pozu almak için çim, kum, parke taşları ve oluklu kaldırım üzerinde yavaşça sürünebiliyor; sonra hipogravite sıçramalarını kullanarak çok basamaklı merdivenleri, 2,35 metre yüksekliğindeki bir duvarı veya üç metre genişliğindeki bir dereyi aşabiliyor. Düşük yerçekimi sıçrama stratejisi, orta boyuttaki engelleri aşmak için saf uçuşa göre de çok daha enerji verimli olduğunu kanıtlıyor: bazı testlerde, sıçramalar aynı engelin üzerinden süzülme ya da uçuşla geçmek için gereken toplam enerjinin onda birinden daha azını kullanmış.
Bu Gelecekteki Robotlar İçin Ne Anlama Geliyor
Basitçe söylemek gerekirse, bu çalışma robotların yerçekimini zayıfmış gibi göstererek ve kalkış sonrası uçuş yolunu düzelterek daha uzağa, daha doğru ve daha güvenli sıçrayabileceğini gösteriyor. GravOff’un tasarımı, felaket müdahalesinde moloz üzerinde zıplayabilecek veya diğer gezegenlerde uçurumlar ve kraterler arasında atlayabilecek gelecekteki keşif araçlarına işaret ediyor; bunlar aynı zamanda tam olarak nerede ve ne zaman ineceklerini önceden tahmin edebilirler. Yerçekimini itkiyle dengeleme ve uçuş ortasında yayı yönlendirme gibi aynı fikirler birçok diğer sıçrayan robota da eklenebilir ve böylece zıplama, riskli son çare olmaktan ziyade planlı, öngörülebilir bir hareket modu haline gelebilir.
Atıf: Sun, Z., Zhao, J., Li, Y. et al. Robotic leaping enhanced by thrust-induced hypogravity, achieving precise, predictable, and extended jumps. Nat Commun 17, 2523 (2026). https://doi.org/10.1038/s41467-026-68932-0
Anahtar kelimeler: sıçrayan robotlar, hipogravite, itki vektörleme, bacaklı hareket, trajektori kontrolü