Clear Sky Science · tr
Biyoilhamlı spiking mimarisi enerji kısıtlı dokunma kodlamasını mümkün kılıyor
Robotlar için daha akıllı dokunmanın önemi
Uç parmaklarımız saniyenin kesirleri içinde bir kum tanesini, kayan bir bardağı veya nazik bir dokunuşu hissedebilir ve bunu yaparken son derece az enerji harcar. Robotlar fabrikaların dışına çıkarak evlere, hastanelere ve kalabalık iş yerlerine girdikçe, insanlarla ve kırılgan nesnelerle güvenli etkileşim kurabilmek için benzer bir dokunma duygusuna ihtiyaç duyacaklar. Bu çalışma, makinelerin dokunulan yeri yüksek hassasiyetle algılamasını sağlayan, aynı zamanda enerji kullanımını son derece düşük tutan yeni bir yapay deri ve beyin-esinli işlem sistemi tanıtıyor — mobil ve işbirlikçi gelecekteki robotlar için kritik bir gereksinim.
Bize benzeyen esnek bir deri
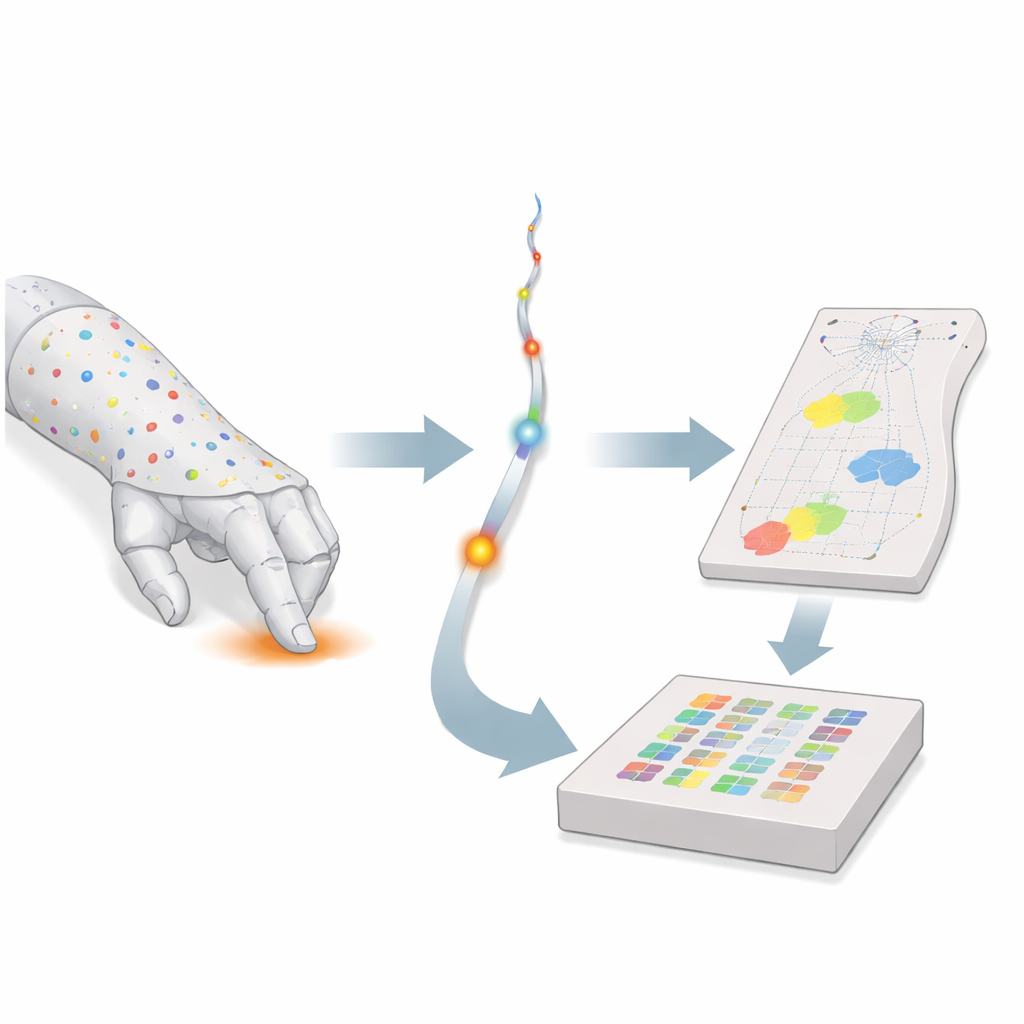
Araştırmacılar insan önkolu şeklinde yumuşak, silikon bir "e-deri" tasarlayıp tek bir saç kılı inceliğindeki fiber boyunca 21 küçük optik sensör yerleştirdiler. Fiber Bragg Izgaraları olarak adlandırılan bu sensörler, deri gerilip büküldüğünde fiber içinde yansıyan ışığın rengini kaydırarak tepki veriyor. Fiber yüzeyin altında dolandığı için her sensör sadece tek bir noktaya değil küçük bir bölgeye duyarlı; tıpkı gerçek dokunma alıcılarının derimiz boyunca yayıldığı gibi. Bu yapay reseptörlerin bazıları çok yerel basınca güçlü tepki verirken, diğerleri deformasyonlara daha geniş ölçekli yanıt veriyor; bu, insan derisindeki farklı sinir uçlarının hem ince detayları hem de genel şekli yakalamasıyla paralellik gösteriyor.
Dokunmayı elektriksel spike’lara dönüştürmek
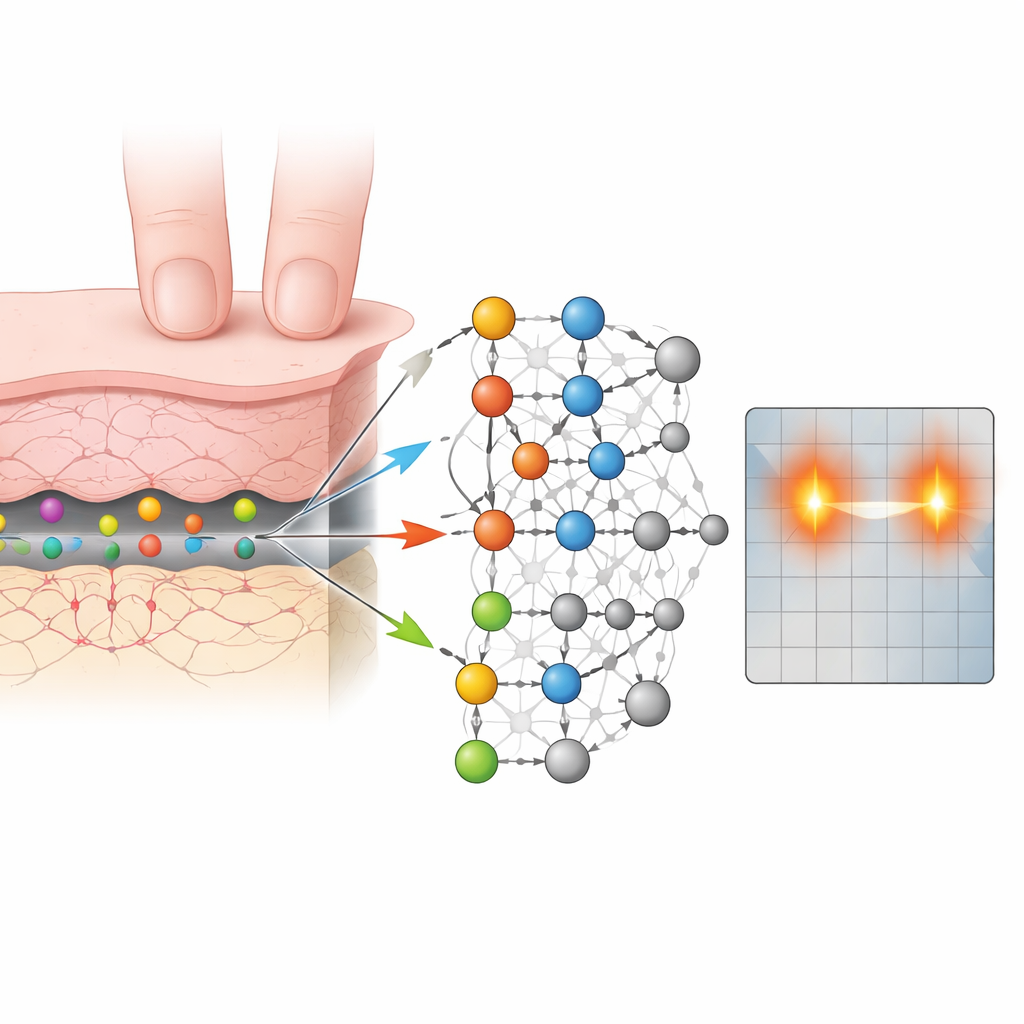
Bu zengin veri akışını yorumlamak için ekip, sayı çerçevelerini işleyen geleneksel derin öğrenme modellerine dayanmadı. Bunun yerine biyolojiyi daha yakından taklit ederek bilgi akışının kısa elektriksel darbeler — yani sinir impulslarına benzer "spike" lar şeklinde aktığı bir spiking sinir ağı kullandılar. E-deriden gelen optik sinyaller spike akışlarına dönüştürülüp ağa gönderiliyor. Ağdaki her çıkış nöronu derideki belirli bir noktayı temsil ederek yüzeyin iki boyutlu iç haritasını oluşturuyor. E-deriye bir şey dokunduğunda, ilgili nöron kümesi nerede temas olduğunu açığa çıkaran bir desenle spike üretiyor ve sistem bu etkinliğin merkezinden dokunma konumunu hesaplıyor.
Daha az kaynakla daha keskin dokunma
Bu tasarımla sistem, yapay önkol üzerindeki tek dokunuş noktalarını tipik olarak yaklaşık üç milimetre hata ile konumlandırıyor; bu, güçlü bir derin öğrenme karşılaştırma yöntemini yaklaşık üçte bir oranında geride bırakıyor ve sensör aralığından beklenenden yaklaşık on kat daha iyi bir mekansal çözünürlük sağlıyor. Sistem aynı zamanda aynı anda dört eşzamanlı temasa kadar birden fazla noktaya da çalışıyor ve elle değişken kuvvet ve yönde uygulanan basınçlarda da performans gösteriyor. Araştırmacılar ağ içindeki farklı bağlantı düzenlerini incelediler ve spinal kordtaki erken dokunma yollarından esinlenen — uyarıcı hücrelerin komşu çıkışları bastıran inhibitör ara nöronlara beslendiği — bir düzenin mekansal ayrıntıyı keskinleştirmek için kritik olduğunu buldular. Bu "yanal inhibisyon" temsilin net kalmasına yardımcı olarak temaslar birbirine yakın olduğunda bulanıklığı engelliyor.
Sadece doğruluk için değil, düşük enerji için tasarlandı
Çalışmanın merkezi hedeflerinden biri enerji tüketimini kontrol altında tutmak; bu, sensörlerle kaplı bir robot vücudu söz konusu olduğunda kritik önem kazanıyor. Ekip, spiking aktivitesini azaltma baskısını taklit ederek ağı daha az spike üretmeye zorlayacak şekilde eğitti; bu, evrimin performansı metabolik maliyetle takas etme gereksinimini yansıtıyor. Kısıtlamasız koşullarda, daha esnek ve biyolojik açıdan daha az gerçekçi bir mimari biraz daha iyi performans gösterdi. Ancak spike aktivitesi enerji verimli düzeylere indirildiğinde, biyoilhamlı düzen aynı etkinlik bütçesi için aslında daha yüksek doğruluk sağladı. Araştırmacılar ardından bu ağı nöronları ve sinapsları doğrudan analog elektroniğe uygulayan bir karma sinyalli nöromorfik çipe aktardılar. Bu donanımda dokunma sırasında dokunsal sistem alt-milivat gücünde, beklemede ise sadece birkaç mikrowatt tüketti ve hassasiyette çok az kayıp yaşandı.
Laboratuvardaki önkollardan geleceğin robot bedenlerine
Genel olarak bu çalışma, yumuşak, dağıtık algılamayı beyne benzeyen spiking hesaplama ile dikkatli bir şekilde birleştirmenin makinelerin ağır bir enerji faturası olmadan hızlı ve hassas bir dokunma duyusu kazandırabileceğini gösteriyor. Sadece performansı değil, aynı zamanda sinir sistemindeki erken dokunma yollarının bağlantı ilkelerini de eşleyerek sistem, evrimin belirli devre motiflerini neden tercih etmiş olabileceğine dair bir ipucu veriyor: katı enerji sınırları altında yeterince iyi doğruluk sunuyorlar. Ölçeklendiğinde benzer e-dersler ve nöromorfik işlemciler robotların ve protez cihazların yüzeyleri boyunca teması hissetmesine, beklenmedik çarpmalara hızlı tepki vermesine ve insanların yaşadığı ve çalıştığı karmaşık, dinamik ortamlarda daha güvenli ve doğal şekilde etkileşim kurmasına olanak tanıyabilir.
Atıf: Ortone, A., Filosa, M., Indiveri, G. et al. Bioinspired spiking architecture enables energy constrained touch encoding. Nat Commun 17, 2108 (2026). https://doi.org/10.1038/s41467-026-68858-7
Anahtar kelimeler: yapay deri, dokunsal algılama, spiking sinir ağları, nöromorfik donanım, robotik güvenlik