Clear Sky Science · tr
Dokunma hissini birbirlerinden öğrenmeleri için dokunsal sensörleri eğitmek
Hissetebilen ve Dokunuşlarını Paylaşabilen Robotlar
Robotlar fabrikalardan çıkarak evlere, hastanelere ve depolara girmeye başladıkça, genellikle sahip olduğumuzu varsaydığımız bir duyguya ihtiyaçları var: dokunma. Parmaklarımızın bir cips ile ağır bir kutuyu tutarken otomatik olarak ayar yapması gibi, geleceğin robotları da ne kadar sıkacaklarını ve bir nesnenin kaymak üzere olduğunu ne zaman anlayacaklarını öğrenmeliler. Bu makale, robot "derisinin" diğer derilerden kuvvet algılamayı öğrenmesine olanak veren yeni bir yaklaşımı tanıtıyor; bu yöntem pahalı kalibrasyonları azaltıyor ve makineleri insan benzeri ustalığa yaklaştırıyor.
Robot Dokunuşunu Doğru Yapmanın Zorluğu
Günümüz robotlarının zaten birçok tür yapay derisi var. Bazıları yumuşak jelleri içine bakan küçük kameralar kullanıyor, diğerleri manyet veya basıncı algılayan elektronik ağlara dayanıyor. Her tasarım bazı görevlerde üstünlük sağlıyor, ancak hepsi dokunmanın farklı "lehçelerini" konuşuyor: aynı itme iki sensörde çok farklı sinyaller üretebilir. Bugün, her yeni sensör genellikle hassas kuvvet ölçerlerle binlerce kez tekrarlanan zahmetli bir eğitim sürecine ihtiyaç duyuyor. Daha da kötüsü, yumuşak malzemeler zamanla yaşlanıp aşındığı için, bir sensör değiştirildiğinde bu maliyetli kalibrasyon tekrar yapılmak zorunda kalıyor.
İnsan Beyninden Bir Ders Ödünç Almak
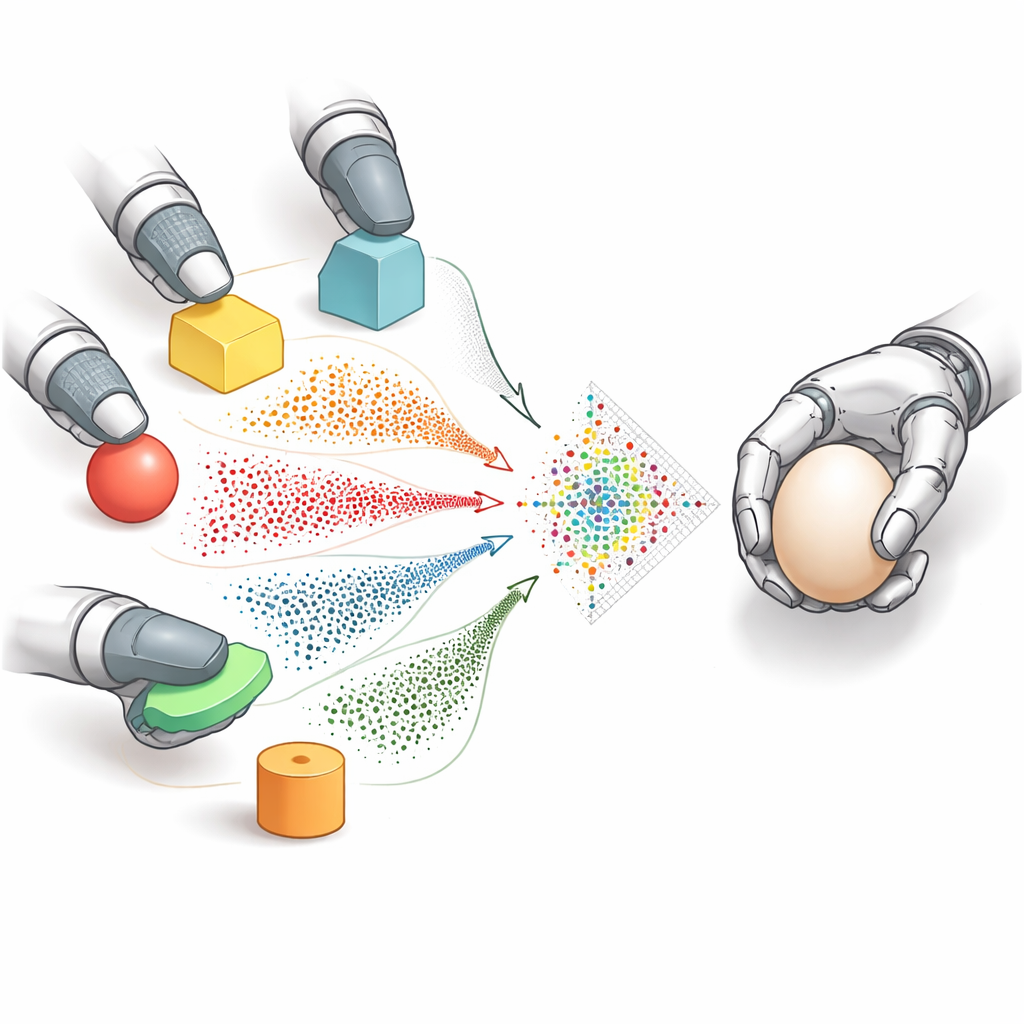
İnsanlar benzer bir problemi zahmetsizce çözer. Derimiz farklı türde dokunma reseptörleriyle doludur, yine de beyin tüm bu sinyalleri paylaşılan bir iç koda dönüştürür. Bu birleşik dokunsal hafıza, daha önce hiç dokunulmamış bir el bölgesinin nasıl hissedeceğini, geçmiş deneyimlerden yararlanarak tahmin etmemize izin verir. Bu çalışmanın arkasındaki araştırmacılar robotlarda bu fikri taklit ediyor. Tüm sensör çıkışlarını—kamera görüntüleri, manyetik okumalar veya elektronik sinyaller—cildin nasıl deforme olduğunu temsil eden noktacıklar hâlinde ortak, resim benzeri bir biçime dönüştürüyorlar. Bu paylaşılan işaret temsilciliği, herhangi bir sensörün kullanabileceği basit bir "dokunma dili" olarak işliyor.
Bir Sensöre Başkasını Taklit Etmeyi Öğretmek
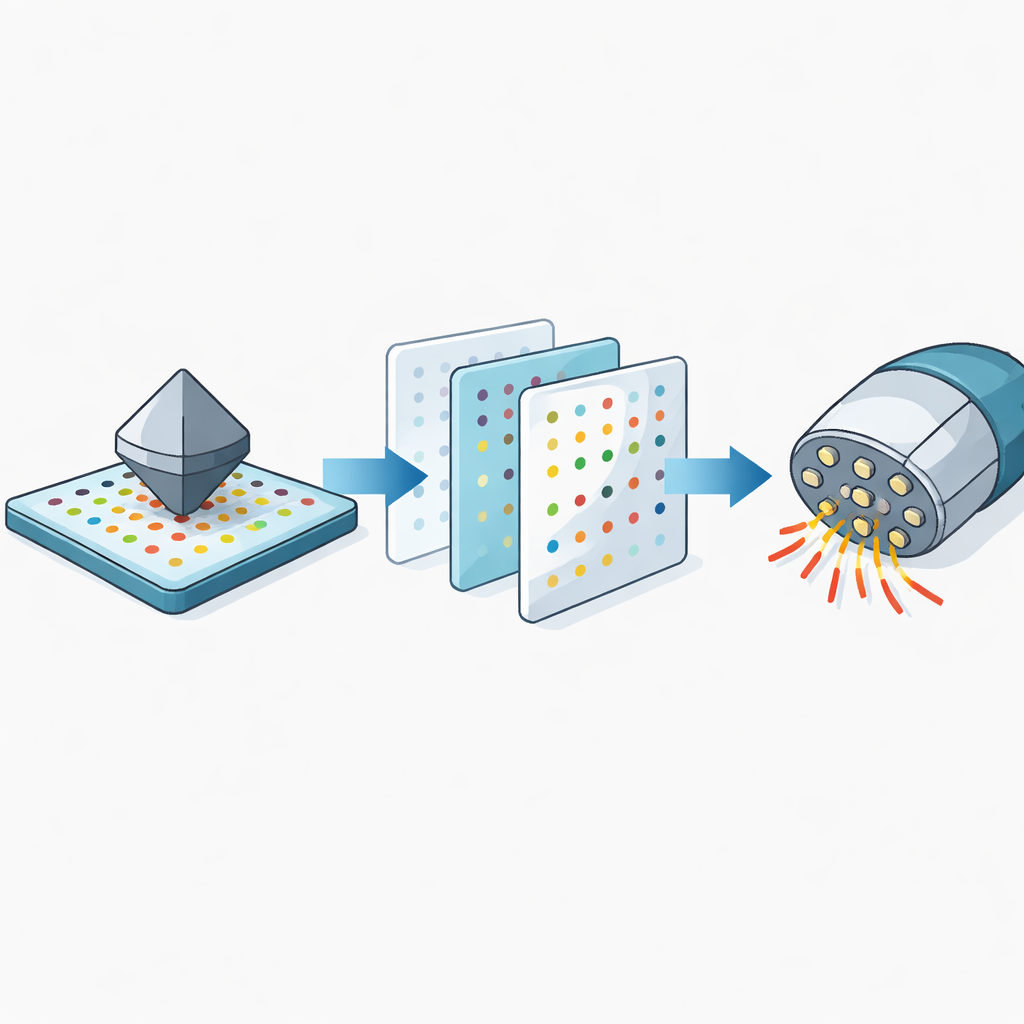
Tüm sensörler bu nokta tabanlı dili konuşmaya başladıktan sonra, ekip işaretten işarete çeviri adını verdikleri bir çeviri adımı sunuyor. Güçlü üretken modeller kullanarak, aynı temasta farklı bir sensörün göstereceği desene dönüştürebilen bir sistem eğitiyorlar. Bu, iyi kalibre edilmiş bir sensörün etkili biçimde kalibre edilmemiş bir sensörün ne hissedeceğini "hayal edebilmesi" ve onun için sentetik eğitim verisi üretebilmesi anlamına geliyor. İkinci bir model ise bu nokta görüntülerinin kısa dizilerine bakarak üç yönde kuvvetlerin zaman içinde nasıl değiştiğini, itme ve yan kayma etkilerini hesaba katarak tahmin ediyor.
Yumuşak Derinin Gerçek Dünyadaki Farklarını Ele Almak
Uygulamada, farklı robot derileri yalnızca şekil ve bağlantı bakımından farklı değil; ayrıca daha yumuşak veya daha sert olabilen ve yaşlandıkça değişen malzemelerden yapılıyorlar. Bu farklılıklar, desenler benzer görünse bile kuvvet tahminlerini bozabilir. Araştırmacılar her tür yumuşak malzemenin yük altında nasıl büküldüğünü ölçüyor ve etiketlenen kuvvetleri eğitimden önce yukarı veya aşağı ölçeklendiren basit bir düzeltme adımı oluşturuyorlar. Bu malzeme telafisi, özellikle çok yumuşak ve çok sert deriler arasında bilgi aktarılırken hataları büyük ölçüde azaltıyor.
Laboratuvardan Günlük Manipülasyona
Ekip, GenForce adını verdikleri yöntemlerini, aynı kamera tabanlı pedin birden çok kopyasından manyetik kullanan veya kıvrımlı parmak ucu benzeri şekillere sahip oldukça farklı tasarımlara kadar geniş bir sensör karışımında test ediyor. Simülasyon ve donanımda 200'den fazla kombinasyonda GenForce, başka bir sensörde eğitilmiş bir modeli basitçe yeniden kullanmaya kıyasla tahmin hatalarını keskin şekilde düşürüyor. Gösterimlerde, her parmağında farklı dokunsal deriler bulunan bir robot el, aktarılmış modelleri kullanarak meyve ve cips gibi kırılgan nesneleri nazikçe kavrıyor ve kavrama taraflarından gelen okumaları koordine ederek kayan nesneleri algılıyor ve düzeltiyor.
Robot Ellerin Geleceği İçin Anlamı
Dokunsal sensörlerin kuvvet algılamayı sıfırdan başlamak yerine birbirlerinden öğrenmelerine izin vererek, GenForce ölçeklenebilir şekilde daha kolay ve daha ucuz robot ellerine işaret ediyor. Tek bir dikkatle kalibre edilmiş sensör birçok başkasını, hatta farklı tasarımları bile eğitebilir ve önceden eğitilmiş modeller yalnızca az miktarda yeni veriyle ince ayar yapılabilir. Uzman olmayanlar için sonuç basit: bu çalışma, robotların ne kadar sıkacaklarını hissetmelerini ve nesneler kaymaya başladığında hızla tepki vermelerini pratik hale getiriyor; bizi insan ellerinin güvenli dokunuşuyla gerçek dünyayı ele alan makinelere daha da yaklaştırıyor.
Atıf: Chen, Z., Ou, N., Zhang, X. et al. Training tactile sensors to learn force sensing from each other. Nat Commun 17, 2101 (2026). https://doi.org/10.1038/s41467-026-68753-1
Anahtar kelimeler: robot dokunuşu, dokunsal sensörler, kuvvet algılama, robot manipülasyonu, transfer öğrenme