Clear Sky Science · tr
Manyetik cımbız tabanlı zebrabalığı embriyoları için otomatik hücre parti mikroenjeksiyon sistemi tasarımı
Neden küçük balık yumurtaları önemli
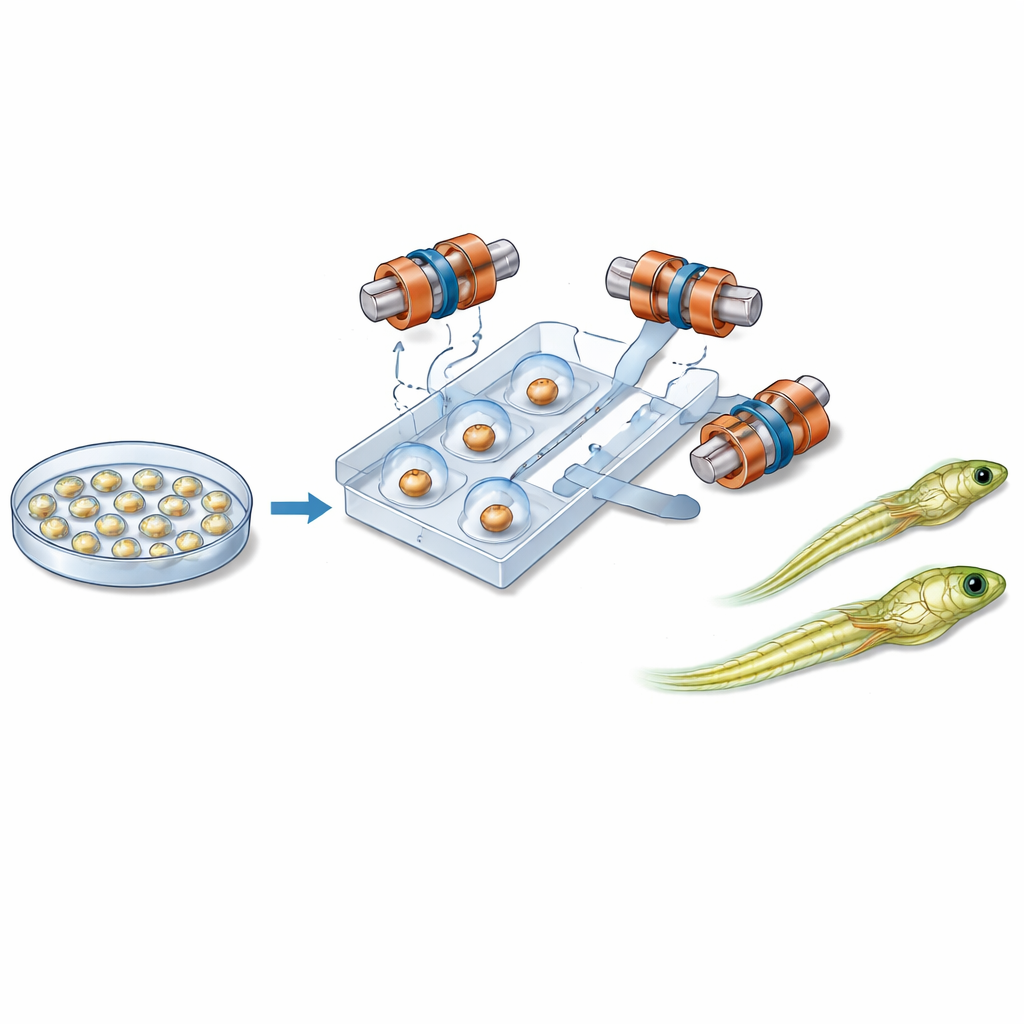
Yeni ilaçlar veya gen tedavileri insanlara ulaşmadan önce, bilim insanları bunları sıklıkla küçük ve hızlı gelişen hayvanlarda test eder. Zebrabalığı embriyoları saydam ve hızlı geliştiği için araştırmacıların organların oluşumunu gerçek zamanlı izlemesine olanak tanır ve bu nedenle tercih edilir. Ancak genlerini değiştirmek veya ilaç vermek için her hassas yumurta mikroskobik bir iğne ile tek tek enjekte edilmelidir; bu görev genellikle yavaş, yorucu ve insan becerisine güçlü biçimde bağlıdır. Bu makale, zebrabalığı embriyolarını insanlardan daha hızlı, daha nazikçe ve daha güvenilir şekilde otomatik olarak enjekte edebilen yeni bir robotik sistemi tanıtarak daha büyük ve daha tutarlı deneylerin önünü açıyor.
Kırılgan hücreleri ele almanın yeni bir yolu
Geleneksel mikroenjeksiyon, eğitimli bir operatörün cam bir iğneyi mikroskop altında yönlendirmesini, her embriyoyu bulmasını, doğru yönde döndürmesini ve hayati bölgeleri zarar görmeden delmesini gerektirir. Bu özellikle zordur çünkü embriyolar önemli bölgelerin zarar görmemesi için kaçınılması gereken yumuşak kürelerdir. Mevcut robotik sistemler taşıma ve delinmeyi otomatikleştirmeye yardımcı oldu, ancak tipik olarak her embriyonun üç boyutta nasıl döndürüldüğünü kontrol edemezler. Sonuç olarak iğne riskli bir açıyla girebilir, hayatta kalma oranlarını düşürebilir ve güvenilir şekilde işlenebilecek embriyo sayısını sınırlayabilir. Bu çalışmanın ekibi, mercek değişiklikleri veya manuel ayarlar gerektirmeden embriyoları taşıyıp döndürebilen, enjekte edip serbest bırakabilen tam entegre bir platform oluşturmayı amaçladı.
Manyetler, mikrokanallar ve nazik kontrol
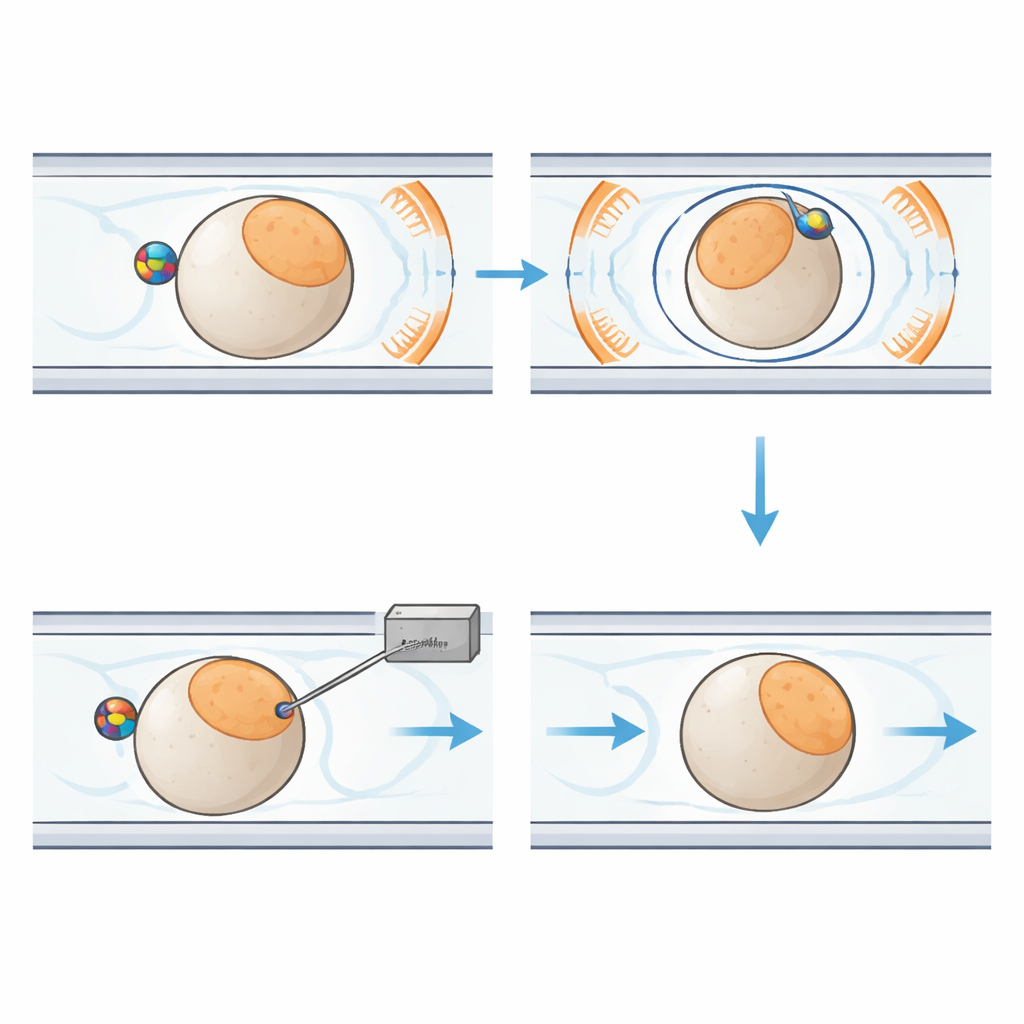
Yeni sistemin merkezinde, bireysel embriyoları sabit bir yolda yönlendiren dar kanallar içeren avuç içi boyutunda bir plastik çip bulunur. Her embriyonun yakınında küçük bir manyetik boncuk yer alır. Çipin etrafına yerleştirilmiş altı dikkatle düzenlenmiş bobin, üç boyutta uniform bir manyetik alan üretir. Bu alanın yönünü zaman içinde değiştirerek sistem boncuğun dönmesini sağlar. Boncuk ile embriyonun yüzeyi arasındaki sürtünme sayesinde tüm hücre boncuğa bağlı iki dişli gibi birlikte döner. Bu, robotun embriyoyu görüntüleme düzlemi dışına eğmesine veya hassas bölge iğne yolunda güvenli bir konuma gelene kadar düzlem içinde döndürmesine olanak tanır. Sıvı ve nazik hava basıncı embriyoları yerinde hareket ettirir ve sabitlerken, ayrı bir modül enjeksiyon iğnesini ve genetik maddenin küçük akışını kontrol eder.
Dar bir görüş alanında net görmek
Bu hassas koreografiyi mümkün kılmak için araştırmacılar mikroskobik manipülasyon algılama ağı adını verdikleri gelişmiş bir bilgisayarla görme sistemi de tasarladı. Sistem, mikroskop kamerasından gelen görüntüleri gerçek zamanlı analiz ederek her embriyoyu tespit eder, ince iğne ucunu saptar ve gelişim için kritik yapıların bulunduğu yumurtanın iki zıt “kutbunu” ayırt eder. Ağ, çift özellik çıkarım yolları, önemli ayrıntıları vurgulayan dikkat modülleri ve görüntü bilgisinin çok ölçekli füzyonu gibi modern derin öğrenme yöntemlerini kullanarak mikroakışkan çip içindeki karışık, düşük ışıklı ortamla başa çıkar. Binlerce görüntü üzerindeki testlerde, nesneleri doğru algılama ve embriyo bölgelerini segmentleme doğruluğu yaklaşık %98–99 civarında oldu ve manyetik rotasyon ile iğne yerleşimini yönlendirmek için gereken güvenilir geri bildirimi sağladı.
Canlı zebrabalıklarında işe yaradığını kanıtlamak
Ekip, otomatik sistemlerini her biri 100 zebrabalığı embriyosu kullanan deneyimli insan operatörlerle karşılaştırdı. Robot embriyoları ortalama 33.8 saniyede enjekte ederek manuel çalışmanın iki katından daha hızlı tamamladı ve her hücreyi başarıyla deldi. Ayrıca her embriyoyu ortalama 2.1 derece gibi küçük bir açısal hatayla yönlendirdi; bu insan operatörlerin hatasının yaklaşık yarısıydı. En önemlisi, robotla enjekte edilen embriyoların %88’i larva olarak çatlamaya kadar hayatta kaldı; manuel enjeksiyondan sonra bu oran %66 idi. Floresan mikroskop altında otomatik sistemden çıkan larvalar yeşil parladı; bu da verilen genetik maddenin alınıp planlandığı gibi ifade edildiğini gösterdi. Embriyoları mekanik araçlarla sıkıştırmak yerine manyetik olarak döndürerek sistem deformasyonu ve hasarı en aza indirirken yüksek verimi korudu.
Gelecek çalışmalar için anlamı
Basitçe söylemek gerekirse, bu çalışma mikrokanallar, manyetik kontrol ve akıllı görüntü analizinin dikkatle birleştirilmesinin, hassas balık embriyolarını geleneksel araçları kullanan yetenekli bir kişiden daha hızlı ve daha yüksek hayatta kalma ile enjekte edebileceğini gösteriyor. Zebrabalıkları gelişim, hastalık ve ilaç etkilerini incelemek için önemli bir platform olduğundan, güvenilir yüksek verimli bir enjektör, daha önce manuel emeğin sınırladığı büyük genetik taramaları ve uzun süreli biyolojik çalışmaları hızlandırabilir. Çip ve kontrol ayarlarına uygun tasarım değişiklikleri yapıldığında, aynı strateji diğer hücre tiplerine ve küçük organizmalara da uyarlanarak hassas hücresel cerrahiyi birkaç uzmanın uyguladığı bir sanat olmaktan çıkarıp otomatik, standartlaşmış bir sürece dönüştürebilir.
Atıf: Guo, X., Wang, F., Zhao, A. et al. Design of an automated cell batch microinjection system based on magnetic tweezers for zebrafish embryos. Microsyst Nanoeng 12, 113 (2026). https://doi.org/10.1038/s41378-026-01230-3
Anahtar kelimeler: zebrabalığı embriyoları, mikroenjeksiyon, manyetik cımbızlar, mikroakışkanlar, robotik hücre manipülasyonu