Clear Sky Science · tr
Aktüasyon-yapı entegre origami mekanizmasına dayalı paralel bacaklı böcek ölçeğinde robot
Sıkı Alanlar İçin Küçük Robotlar
Kırık bir duvardan süzülebilecek, dar bir boru boyunca sürünebilecek veya bir su birikintisini bile geçebilecek kadar küçük ve hafif bir kurtarma robotu hayal edin. Bu makale böyle bir makineyi tanıtıyor: tek bir katlanmış levhadan yapılmış, avuç içi büyüklüğünde, böcek benzeri bir robot olan PLioBot; boyutuna göre çok hızlı hareket ediyor ve birçok tür zorlu araziyle başa çıkabiliyor. Araştırmacılar, zekice katlama tekniklerini küçük titreşim motorlarıyla birleştirmenin düz malzemeleri sıkışık, ulaşılması zor yerler için çevik kaşiflere nasıl dönüştürebileceğini gösteriyor.
Düz Levhadan Dört Bacaklı Sürünene
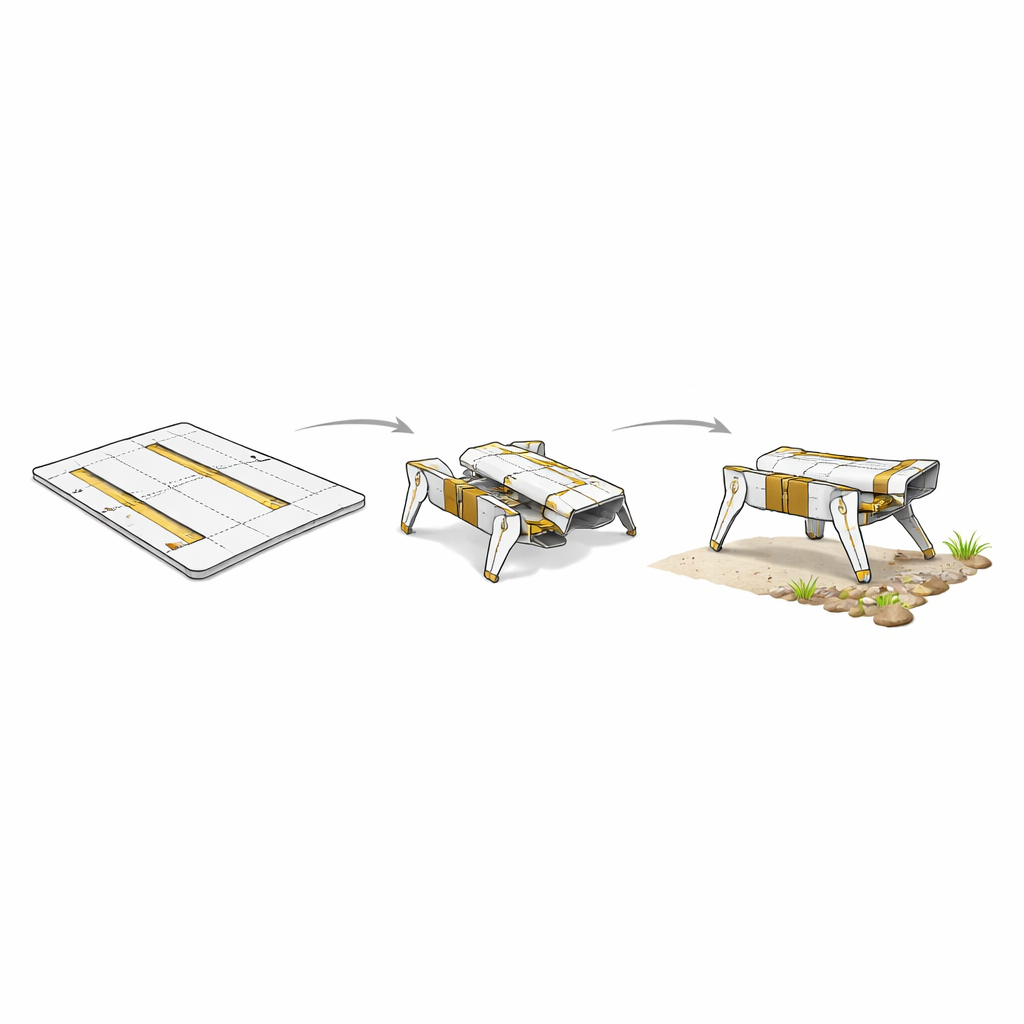
PLioBot, bir kes-yapıştır kâğıt oyuncağına benzeyen düz bir desen olarak başlar. Kâğıt yerine desen; camsı fiber, karbon fiber, esnek plastik film ve kas görevi gören piezoelektrik seramik şeritlerinden oluşan beş katmanlı bir sandviçtir. Plastik katmandaki hassas yerleştirilmiş ince bölgeler menteşe görevi görür. Lazerle kesimden sonra tüm yapı, gövde, dört bacak ve tüm sekiz aktüatörün tek bir sürekli parça hâlinde ortaya çıktığı şekilde koreografik bir sıra ile katlanır. Vida yok, ayrı motor yok, elle hizalama yok—sadece katlama yaklaşık 2,5 santimetre uzunluğunda ve yalnızca 1,2 gram ağırlığında eksiksiz bir robot üretir.
Küçük Bacaklar Nasıl Büyük Adımlar Atıyor
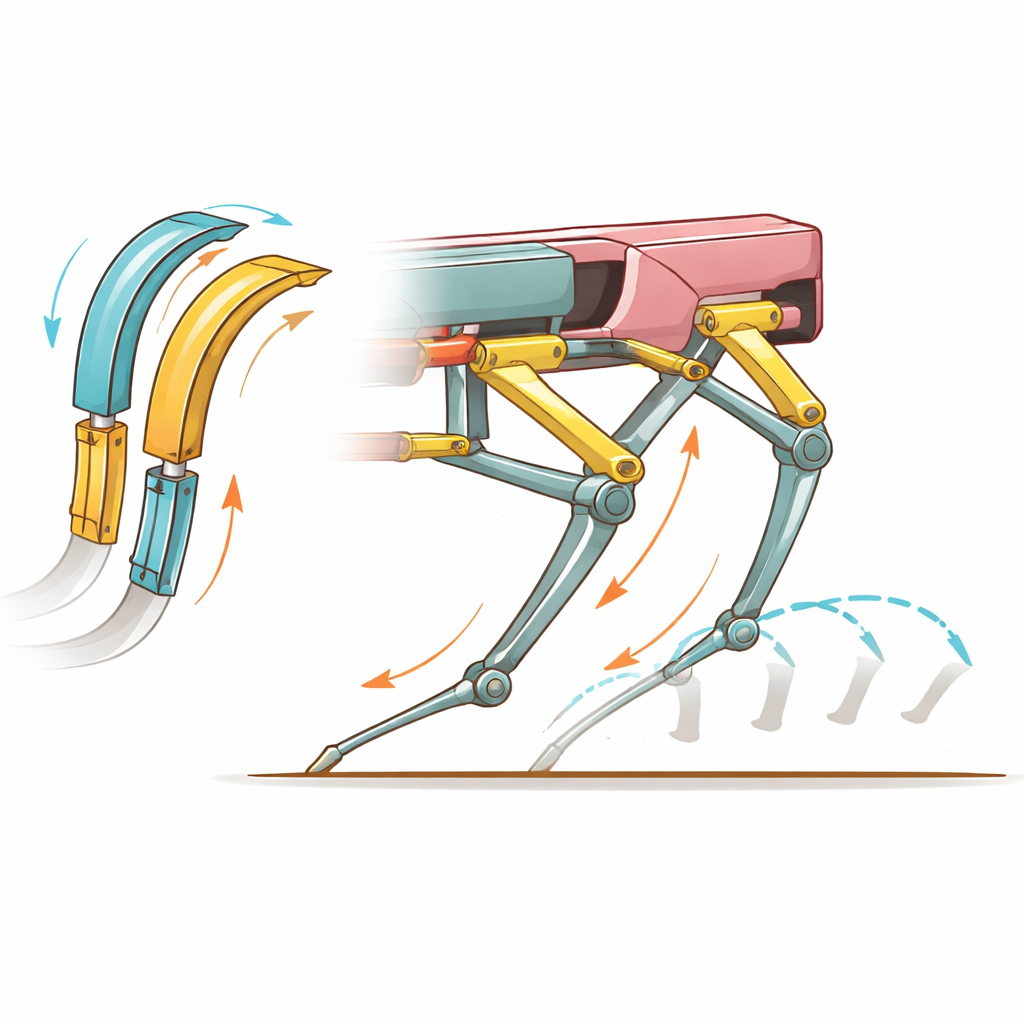
Robotun hareketi piezoelektrik seramiklerden gelir—elektrik voltajı uygulandığında hafifçe bükülen malzemeler. PLioBot’un her bir tarafında bir çift “ikiz” şerit aktüatör bulunur. Alternan voltajlar bu şeritleri ileri geri bükünce, hareketleri bir dizi menteşeli bağlantı üzerinden geçirilir ve küçük ölçekli bir paralel bacak mekanizması gibi davranır. Sinyalleri dikkatlice zamanlayarak her bacak yukarı-aşağı ve ileri-geri hareket edebilir ve ayağıyla döngüsel bir yol çizer. Tüm dört bacağı bir tırıs benzeri desende koordine etmek, robotun zemine verimli bir şekilde itme uygulayıp öne fırlamasını sağlar. En iyi ayarlarda PLioBot saniyede 44,6 santimetre—saniyede yaklaşık 18 vücut boyu—hıza ulaşır ve bu ölçekten bacaklı robotlar arasında en hızlılardan biridir.
Yerleşik Kaslar, Daha Az Montaj Sorunu
Çoğu böcek ölçeğindeki robot birçok küçük parçadan titizlikle monte edilir: ayrı motorlar veya aktüatörler, çerçeveler ve elle hizalanması gereken bağlantılar. Bu, maliyeti artırır, hassasiyeti sınırlandırır ve seri üretimi zorlaştırır. Yazarlar bunu, yapıyı ve aktüasyonu tek bir “origami mekanizmasına” tamamen entegre ederek ele alıyor. Tüm katmanların—sert camsı fiber kaplamalar, ortogonal karbon-fiber elektrotlar, esnek menteşe filmi ve seramik şeritlerin—kesildiği, istiflendiği, pime ait deliklerle hizalandığı ve son kontur lazerle serbest bırakılmadan önce sıcak presle birleştirildiği rafine bir lamine süreci kullanıyorlar. Sonuç, robotun iskeletini, eklemlerini ve kaslarını nihai konumlarında zaten içeren, katlanmaya hazır sağlam bir düz boşluktur.
Gerçek Dünya Arazisinde Yürümek, Tırmanmak ve Yüzmek
Tasarımın laboratuvar tezgâhının dışındayken de işe yarayıp yaramadığını test etmek için ekip PLioBot’u çeşitli günlük engellerden geçirdi. Düz cam üzerinde kayma riski var, ama yine de hızlı hareket ediyor; sünger ve akrilikte tutunma artıyor ama biraz hız kaybı oluyor. 12 dereceye kadar rampaları tırmanıyor ve kendisinden daha ağır yükleri taşıyabiliyor—özellikle 0,8 gramın altındaki yüklerde performansı iyi olmak üzere maksimum 1,7 grama kadar. Sadece 3 santimetre genişliğinde ve 3 santimetrenin altında yüksekliğe sahip dar tünellerde robot, 1,4 gramlık bir yük taşırken birkaç vücut boyu/saniye hızını koruyor. Yarım küre ayak pedleri veya yüzgeç benzeri palalar takılarak PLioBot çakıl ve çim üzerinde ilerliyor, batmadan kayan kumda geçiyor, bir tankın dibinde yürüyor ve yalnızca paletleriyle itiş sağlayarak su yüzeyinde bile yüzebiliyor.
Geleceğin Minik Kaşifleri İçin Anlamı
Basitçe söylemek gerekirse, bu çalışma gövdesi ve kasları tek bir parça olan çok küçük bir robotu yazdırıp katlayabileceğinizi ve bu robotun hızlı hareket edip birçok kirli, gerçek dünya yüzeyiyle başa çıkabileceğini gösteriyor. PLioBot hâlâ harici güç kablolarına bağımlı, yani henüz tam bağımsız değil. Ancak entegre origami tasarımı ve üretim yöntemi, çok sayıda ucuz, böcek ölçeğinde robotun düz parçalar gibi üretilip şekle katlanarak mini piller ve kontrol devreleriyle donatılabileceği bir geleceğe işaret ediyor. Böyle sürüler bir gün hasar görmüş binaları keşfedebilir, endüstriyel boruları denetleyebilir veya diğer gezegenleri araştırabilir—tüm bunlar ilk bakışta zekice kesilmiş bir levhaya benzeyen bir şeyden başlayarak mümkün olabilir.
Atıf: Zhu, Q., Jiang, T., Luo, Z. et al. A parallel-legged insect-scale robot based on actuation-structure integrated origami mechanism. Microsyst Nanoeng 12, 92 (2026). https://doi.org/10.1038/s41378-026-01205-4
Anahtar kelimeler: böcek ölçeğinde robotlar, origami robotik, piezolektrik aktüatörler, araziye uyumlu locomotion, mikro-robot üretimi